STM32 输入捕获的脉冲宽度及频率计算
输入捕获模式可以用来测量脉冲宽度或者测量频率。STM32 的定时器,除了 TIM6 和 TIM7,其他定时器都有输入捕获功能。以下是对脉冲宽度及频率的计算。
#1、脉冲宽度
如下图所示,采集该高电平脉冲的宽度,只需要进入输入捕获上升沿检测,记录当前的发生上升沿时的CNT值,再进行输入捕获下降沿检测,也记录当前发生下降沿时的CNT值,两次CNT值的差值再根据计数的频率就可以算出脉冲的宽度。 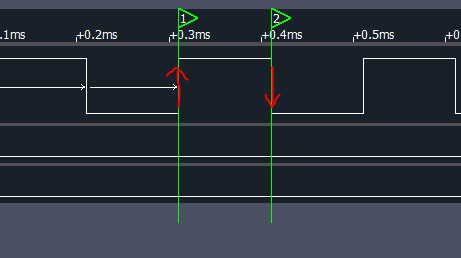 上升沿及下降沿捕获的程序具体实现如下:
上升沿及下降沿捕获的程序具体实现如下:
TIM8_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数
void TIM8_UP_IRQHandler(void)
{
if((TIM8CH4_CAPTURE_STA&0X80)==0) //还未成功捕获
{
if (TIM_GetITStatus(TIM8,TIM_IT_Update) != RESET)
{
if(TIM8CH4_CAPTURE_STA&0X40) //已经捕获到高电平了
{
if((TIM8CH4_CAPTURE_STA&0X3F)==0X3F) //高电平太长了
{
TIM8CH4_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM8CH4_CAPTURE_VAL=0XFFFF;
}
else
TIM8CH4_CAPTURE_STA++; //捕获高电平后定时器溢出的次数++
}
}
}
TIM_ClearITPendingBit(TIM8,TIM_IT_Update); //清除中断标志位
}
void TIM8_CC_IRQHandler(void)
{
if((TIM8CH4_CAPTURE_STA&0X80)==0)
{
if(TIM_GetITStatus(TIM8,TIM_IT_CC4) != RESET) //捕获1发生捕获事件
{
if(TIM8CH4_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM8CH4_CAPTURE_STA|=0X80;//标记成功捕获到一次高电平脉宽
TIM8CH4_CAPTURE_VAL=TIM_GetCapture4(TIM8);
TIM_OC4PolarityConfig(TIM8,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM8CH4_CAPTURE_STA=0; //清空
TIM8CH4_CAPTURE_VAL=0;
TIM_SetCounter(TIM8,0); //计数器清零
TIM8CH4_CAPTURE_STA|=0X40;//标记捕获到了上升沿
TIM_OC4PolarityConfig(TIM8,TIM_ICPolarity_Falling);//CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM8, TIM_IT_CC4); //清除中断标志位
程序中定时器输入捕获配置的TIM8CH4通道,CNT计数的频率1MHZ,即计数1个就是1us。TIM8_UP_IRQHandler是一个定时中断函数,根据TIM8_Cap_Init(0XFFFF,72-1)可知65536us会中断一次,所以总的脉冲宽度时间如下:
temp=TIM8CH4_CAPTURE_STA&0X3F; //从TIM8_UP_IRQHandler中断知中捕获上升沿及下降沿期间进行此中断的次数
temp*=65536;//溢出时间总和
temp+=TIM8CH4_CAPTURE_VAL; //得到总的高电平时间 TIM8CH4_CAPTURE_VAL为CNT计数的值
#2、频率测量
如下图所示,测量脉冲的频率,则分别采集两次输入捕获上升沿的CNT值,脉冲的频率=f/△CNT 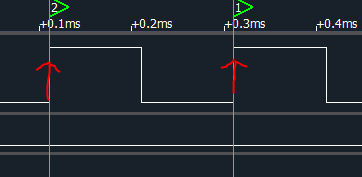 两次上升沿捕获的程序具体实现如下:
两次上升沿捕获的程序具体实现如下:
TIM8_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数
void TIM8_CC_IRQHandler(void)
{
if(TIM_GetITStatus(TIM8,TIM_IT_CC4)!=RESET)
{
TIM_ClearITPendingBit(TIM8, TIM_IT_CC4); //清除中断标志位
if(state==0) //捕获第一个上升沿
{
state=1;
timecount=TIM_GetCapture4(TIM8); //记录第一次上升沿的CNT值
}
else if(state==1)//捕获第二个上升沿
{
state=0;
timecount1=TIM_GetCapture4(TIM8); //记录第二次上升沿的CNT值
if(timecount<timecount1)
{
test=timecount1-timecount; //两次上升沿的差值
}
else if(timecount>timecount1)
{
test=(0xffff-timecount)+timecount1; //两次上升沿的差值
}
else
test=0;
fq=1000000/test; //脉冲的频率
}
}
}
由程序可知配置的定时器的输入捕获的计数的频率为1MHZ,两次捕获上升沿的差值test为计数器CNT计的次数,所以总的周期即为T=1us*test,所以频率就fq=1000000/test HZ;
另外,测量频率除了还可以使用定时器的外部脉冲信号计数来进行。
3、定时器的外部计数模式测频率
因为STM32有外部时钟源模式,即可以根据外部脉冲信号进行计数,然后另外设定定时器定时中断去读取计数器的值,频率=CNT/定时中断时间。程序代码实现如下:
TIM3_Int_Init(9999,7199); //定时1s中断一次
TIM2_Cap_Init(); //外部信号引脚脉冲检测 TIM2_CH1_ETR
void TIM2_Cap_Init(void) //配置 TIM2_CH1_ETR 为外部脉冲计数
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能TIM2时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉
//初始化定时器2 TIM2
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =0; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITRxExternalClockConfig(TIM2,TIM_TS_ETRF); //配置外部触发,否则不会计数
TIM_ETRClockMode2Config(TIM2, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_SetCounter(TIM2, 0);
TIM_Cmd(TIM2,ENABLE ); //使能定时器2
}
/*******************************************************************************
* 名称: TIM3_IRQHandler
* 功能: 通用定时器3中断服务函数
* 形参: 无
* 返回: 无
* 说明: 1S定时中断一次
******************************************************************************/
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!= RESET) //检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除TIMx更新中断标志
CNT=TIM_GetCounter(TIM2); //读取1s内计数器计的CNT值
fq=CNT; //脉冲的频率
TIM_SetCounter(TIM2,0);
}
}
因为知道定时中断时间为1s,所以测量的频率fq=CNT/1(HZ),频率的计算及脉冲宽度的测量有以上方法测试。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号