8086 8253 proteus仿真实验
实验内容

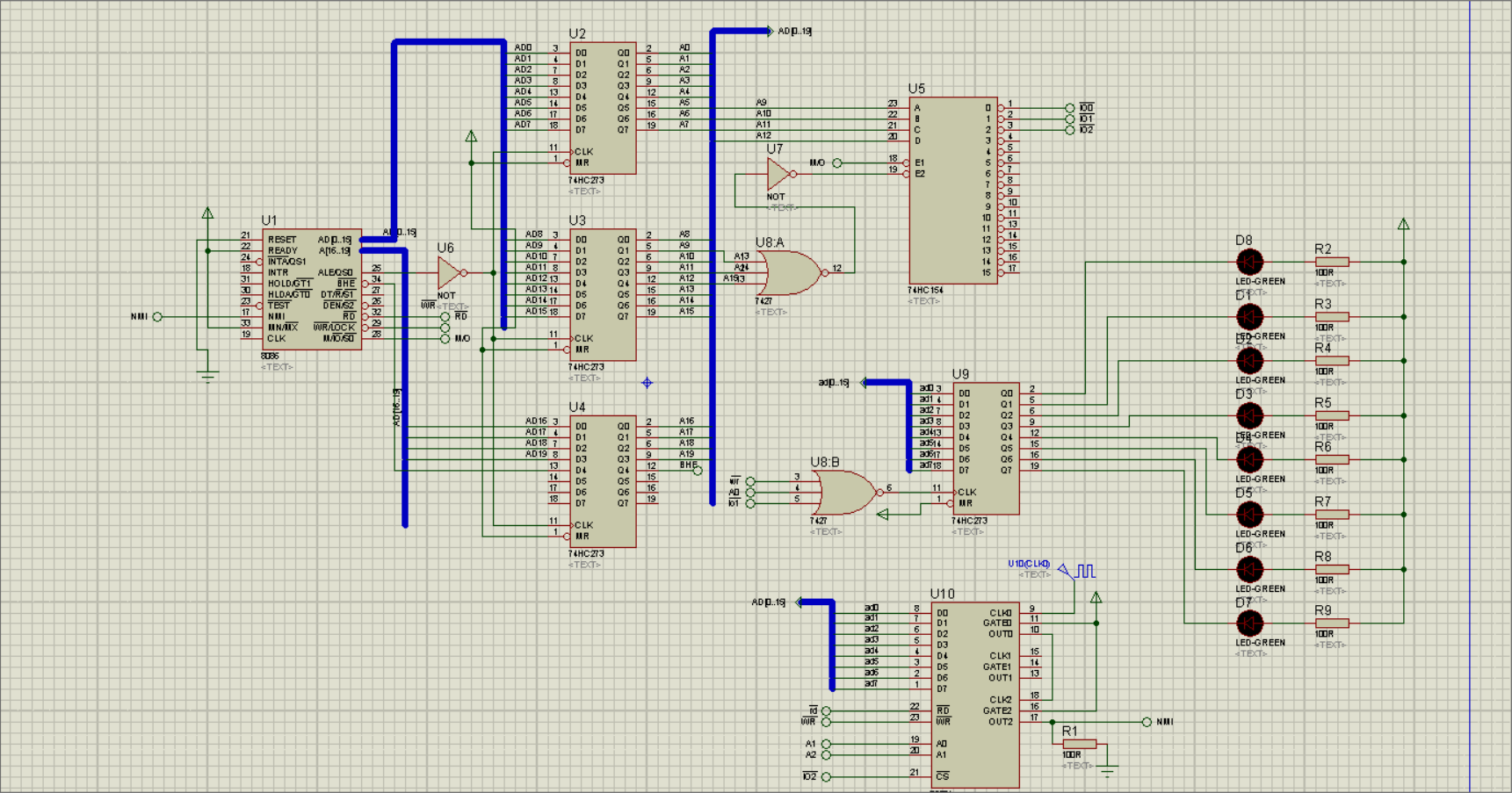
电路图
计数初值
已知\(f_{clk0}=100khz\),所以\(T_{clk0}=\frac{1}{f_{clk0}}=\frac{1}{100khz}=10^{-5}s\)
因为通道0的\(out0\)和通道2的\(clk2\)连在一起,所以可得\(T_{out0}=T_{clk2}\)
在8253中,有\(T_{out}=N*T_{clk}(N为计数初值)\)式子成立
然后题目要求\(T_{out2}=1s\),根据上面式子可得
\(T_{out2}=T_{clk2}*N_2=T_{out0}*N_2=T_{clk0}*N_0*N_2=10^{-5}*N_0*N_2=1s\)
\(N_0*N_2=10^5\)
随便取值使得式子成立,例如
\(\begin{cases} N_0=200\\ N_2=500 \end{cases}\) \(\begin{cases} N_0=250\\ N_2=400 \end{cases}\)
最后要注意汇编语言数值最大就16位,所以别取什么100000和1的组合
关于8523的地址
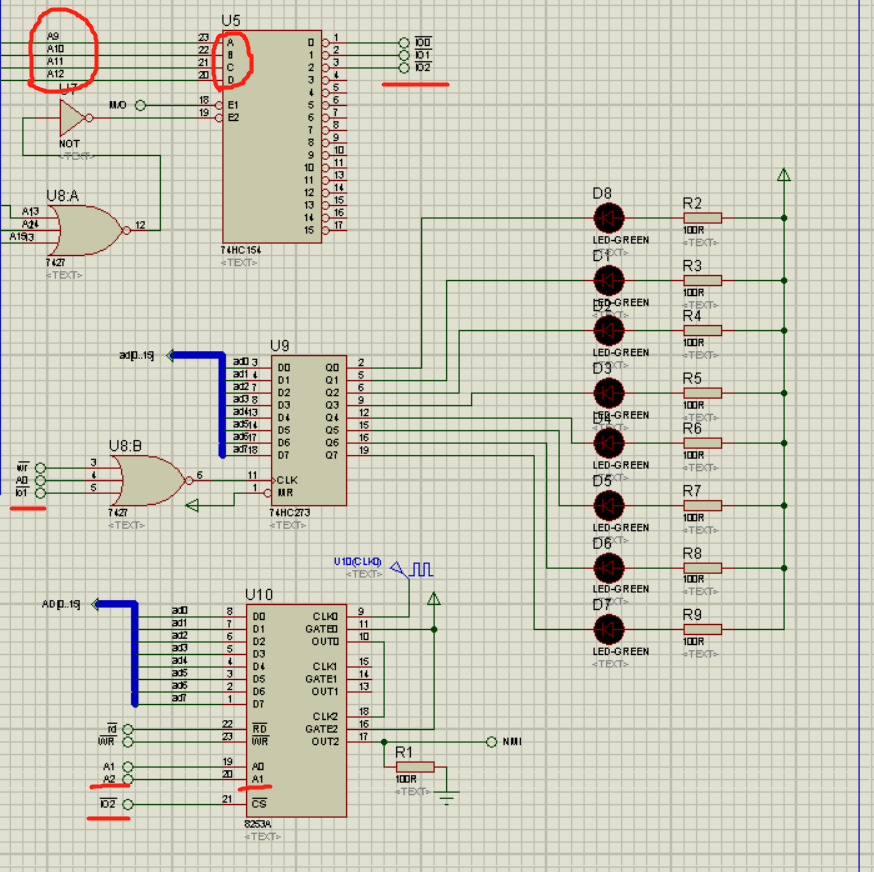
根据电路图可知道\(\overline{IO2}\)与8253相连
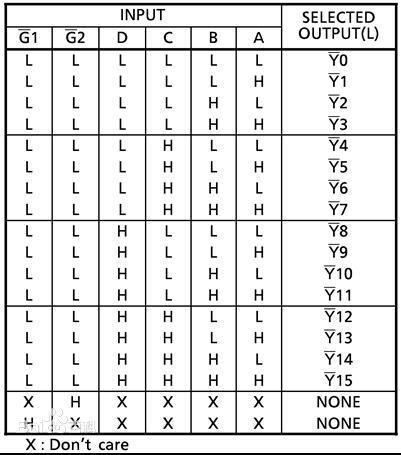
然后查看74HC154的真值表,可以得出
\(\overline{IO2}:A_{12}A_{11}A_{10}A_{9}=0010\)

8523的\(A_0和A_1\),看电路图可以发现,地址线\(A_2\)接在8523的\(A_1\),地址线\(A_1\)接在8523的\(A_0\),根据上面的表格,可得
计数器0地址:\(A_{2}A_{1}=00\)
计数器1地址:\(A_{2}A_{1}=01\)
计数器2地址:\(A_{2}A_{1}=10\)
控制端口地址:\(A_{2}A_{1}=11\)
因此,关于8253的地址,为讨论方便,设其他地址线都为0,毕竟对输出没什么影响
计数器0端口地址:\(A_{19}-A_{0}=0000\ 0000\ 0100\ 0000\ 0000B=400H\)
计数器1端口地址:\(A_{19}-A_{0}=0000\ 0000\ 0100\ 0000\ 0010B=402H\)
计数器2端口地址:\(A_{19}-A_{0}=0000\ 0000\ 0100\ 0000\ 0100B=404H\)
控制端口地址:\(A_{19}-A_{0}=0000\ 0000\ 0100\ 0000\ 0110B=406H\)
关于灯的地址
看电路图可以发现\(\overline{IO1}\)与灯的相关电路连接
查看74HC154的真值表,得到
\(\overline{IO1}:A_{12}A_{11}A_{10}A_{9}=0001\)
然后和灯的地址相关的只有地址线\(A_0\),因为连接的是或非门,只有当输入全为0时输出为1,所以取地址线\(A_0=0\),同样的,可以设其他地址线都为0
因此,灯的地址:\(A_{19}-A_{0}=0000\ 0000\ 0010\ 0000\ 0000B=200H\)
代码内容
在上面的步骤计算完后,就可以开始写代码
DATA SEGMENT
;灯的地址及初始状态
LIGHT_ADD EQU 200H;灯的地址
LIGHT_STATUS DB 11111110B;共有8个灯,1表示关,0表示开,通过循环左移ROL实现灯的状态变换
;8253的地址
PORT0 EQU 400H;计数器0端口地址
PORT2 EQU 404H;计数器2端口地址
PORT3 EQU 406H;控制端口地址
;控制方式字
CONTROL0 EQU 00010110B;计数器0 只读写低字节 方式3 二进制
CONTROL2 EQU 10110000B;计数器2 先读写低字节后读写高字节 方式0 二进制
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
BEGIN:
MOV AX,DATA
MOV DS,AX
;设置2号中断向量
NMI_INIT:
PUSH ES
XOR AX,AX
MOV ES,AX
MOV AL,02H
XOR AH,AH
SHL AX,1
SHL AX,1
MOV SI,AX
MOV AX,OFFSET NMI_SERVICE
MOV ES:[SI],AX
INC SI
INC SI
MOV BX,CS
MOV ES:[SI],BX
POP ES
;8253通道0初始化
;写入方式控制字
MOV DX,PORT3
MOV AL,CONTROL0
OUT DX,AL
;计数器0写入计数初值
MOV DX,PORT0
MOV AL,11001000B;十进制200
OUT DX,AL
;8253通道2初始化
;写入方式控制字
MOV DX,PORT3
MOV AL,CONTROL2
OUT DX,AL
;计数器2写入计数初值
MOV DX,PORT2
MOV AX,0000000111110100B;十进制500
OUT DX,AL;写入低字节计数初值
MOV AL,AH;将高字节的数字赋值给低字节
OUT DX,AL;写入高字节计数初值
;点亮第一个LED灯
MOV DX,LIGHT_ADD
MOV AL,LIGHT_STATUS
OUT DX,AL
;等待中断
JMP $
;程序退出
MOV AH,4CH
INT 21H
;中断服务程序
NMI_SERVICE PROC FAR
;点亮下一个led灯
MOV DX,LIGHT_ADD
MOV AL,LIGHT_STATUS
ROL AL,1;循环左移
OUT DX,AL
MOV LIGHT_STATUS,AL;更新LIGHT_STATUS的值
;通道2送计数初值,再次启动计数
;8253通道2初始化
;写入方式控制字
MOV DX,PORT3
MOV AL,CONTROL2
OUT DX,AL
MOV DX,PORT2
MOV AX,0000000111110100B;十进制500
OUT DX,AL;写入低字节计数初值
MOV AL,AH
OUT DX,AL;写入高字节计数初值
IRET;中断返回
NMI_SERVICE ENDP
CODE ENDS
END BEGIN

 浙公网安备 33010602011771号
浙公网安备 33010602011771号