
UWB基本定位原理
一、
UWB定位技术主要以dw1000芯片为基础实现室内外高精度定位工作,之所以能够实现定位的关键性因素有如下一个方面:
1.dw1000提供数据帧收发时纪录时间戳,这是能够进行两点间测距的基本条件,简单来说,
通过计算数据在空中飞行时间*光速=数据飞行距离,从而测出两节点间的距离。
2.有了数据帧收发时间戳,那么就必须提供足够高的时钟精度,因为1ns的时间电磁波就传输了30cm,
dw1000提供了LDE的微代码,通过PLL使得时钟达到了64G的频率,当然,这个时钟仅提供给LDE使用,
使得dw1000具备了超高精度的时间戳,64G的时钟可以使得dw1000时钟分辨率为15.65ps。
3.在以上基础上,可以实现两点间测距的功能,那么如果需要实现定位呢,则需要一个终端分别和多个基站通信,
分别得到终端与各个基站的距离,且,基站之间的位置与距离在部署前期通过测绘手段可以得到这些数据。
从而得到了终端在这个定位系统中的位置,一般使用球面相交法,通过输入终端离基站的距离,计算出精确的位置信息。
二、TOF测距方式
TOF即 time of flight飞行时间,直译为飞行时间测距法。
这个方法最大的特点就是实现起来简单,最大的缺点就是精度低,既然是高精度定位,那么使用这种方法就不太合适了。
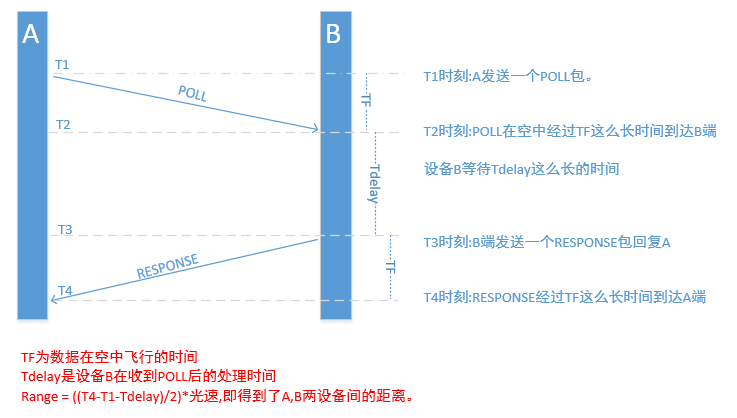
以上测距方式理论上是说得过去的,但是其中存在几个影响测距精度的因素:
1.当设备B在T2时刻收到POLL后需要等待一个固定的时间Tdelay然后在T3时刻发出RESPONSE数据包,那么,
问题出现了,我们在此处讲的Tdelay是一个绝对时间单位,比如3000us,但是A,B设备都有自己的时钟源,
并且要命的是时钟源的存在自我偏差,俗称PPM,比如:我们想Tdelay=3000us但是由于时钟源的偏差问题,
导致真实时间过去了3000.5us,可是在设备A端进行计算的时候还是按照3000us的Tdelay进行计算,那么,
因为时钟源的偏差引入的0.5us的时间就被错误的当成是数据飞行的时间了。这样导致的结果就是,
两设备A,B的真实距离为1m,结果测试得到的距离为2.5m。
2.再一个,Tdelay必须要事先双方约定好。不能有丝毫的差异,这对于设备B来说有些苛刻,
因为有时候设备B可能在Tdelay时间内无法将数据从芯片取出分析然后将要返回的RESPONSE数据包送入芯片内,
并让芯片在T3时刻发送出去。出现这样的情况将会导致测试失败。
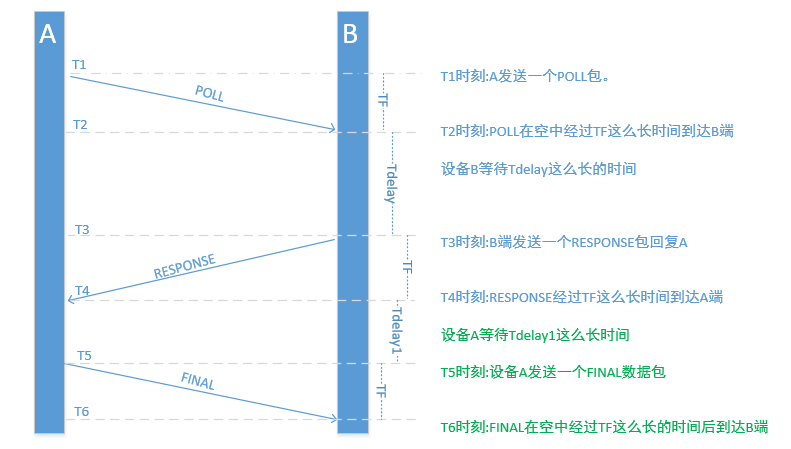
三、TW_TOF测距方式
基于上述TOF的缺陷,引入了TW_TOF这种测距方式,用于消除TOF的不良影响。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号