Apollo自动驾驶实践——第5讲 车辆动力学标定
标定的目的和基本原理
标定的操作方法步骤
标定的应用
1.Apollo软件的标定。
车辆的速度、车载的重量等等需要达到的加速度是不一样的,刹车和油门的使用不一样
不同那个的车所需要的标定表是不一样的
2.标定准备
(1)进入docker环境
(2)启动必要模块:canbus,gps,localization,roscore。
打开canbus:
打开gps:
打开localization:
打开roscore
3.检查模块启动状态
(1)检查canbus:获取底盘数据:

可以看到当前车辆的一些相关信息
(2)检查GPS:

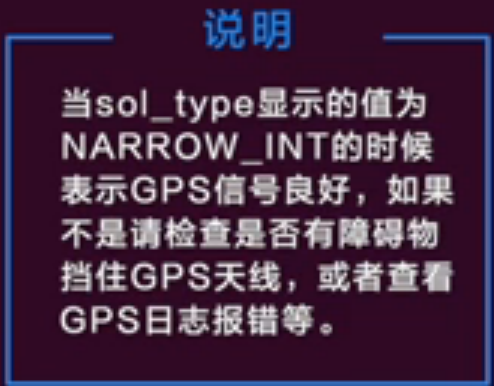
(3)检查localization:

可以看到XYZ信息,定位信息会一直刷新,表示信号正常
4.进入标定:
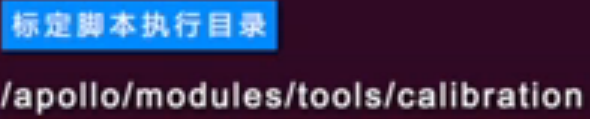
目录:
(1)数据采集:在紧急情况下,需要人为接管车辆的控制。标定开始前确保遥控器已经不再接管车辆。松开急停按钮
调整标定脚本执行目录:

选择较好的场地。
执行python脚本。
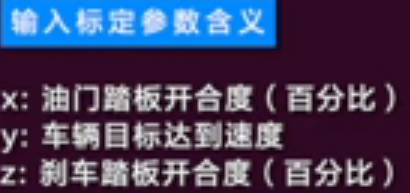
输入XYZ的值:
停止数据采集:
(2)数据处理:

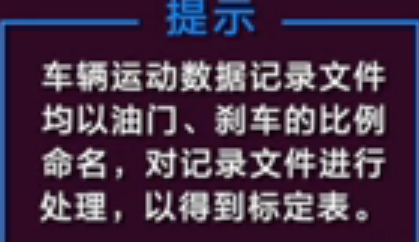



标定数据操作1:删除无用数据
标定数据操作2:拷贝calibration_table数据段

标定数据操作3:将拷贝的数据段放入目标文件对应位置

 浙公网安备 33010602011771号
浙公网安备 33010602011771号