第七章 百度Apollo感知介绍(2)
4.感知算法1
感知:
点云感知

核心内容:点云的检测分割技术
启发式方法:
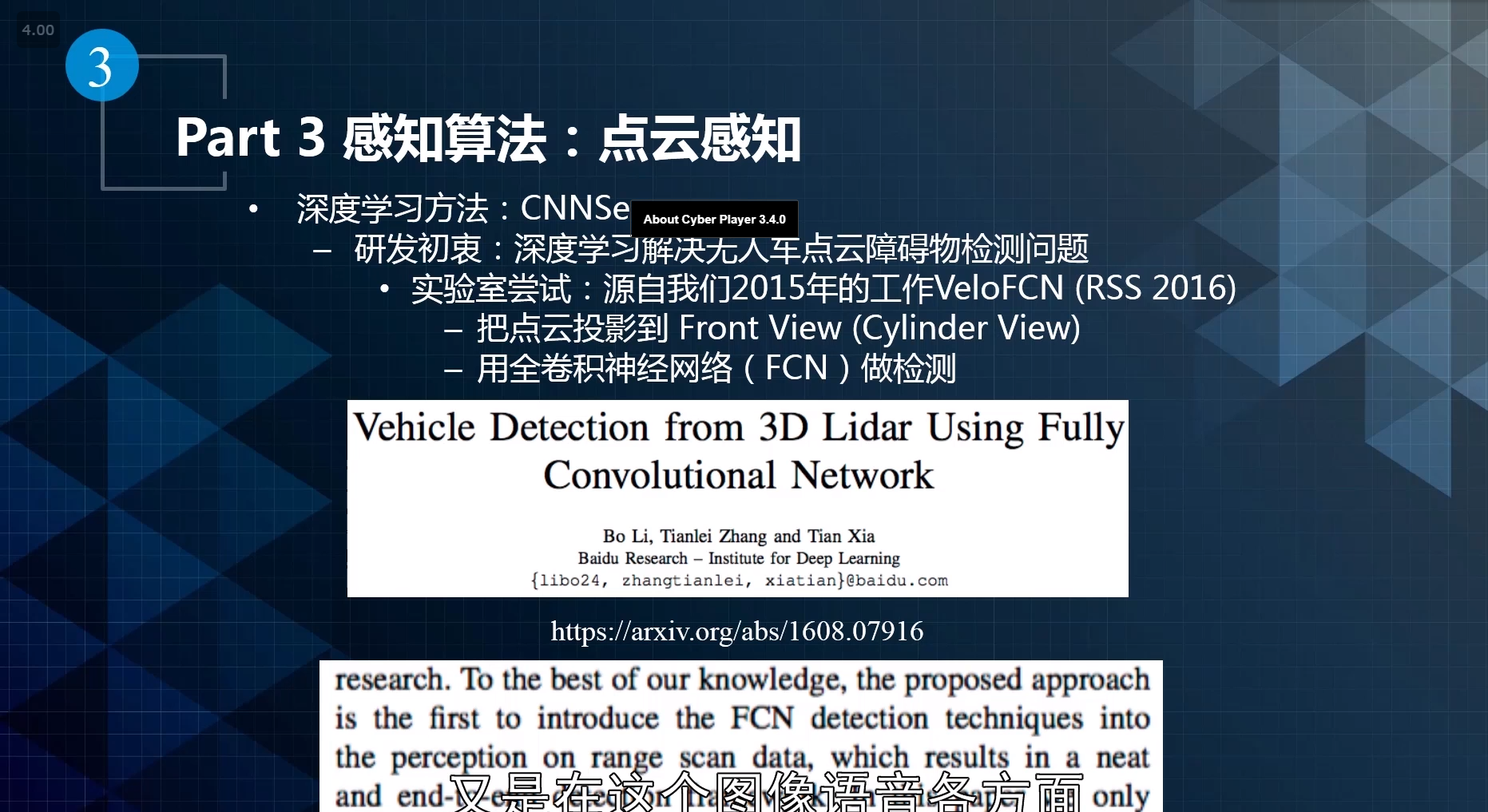
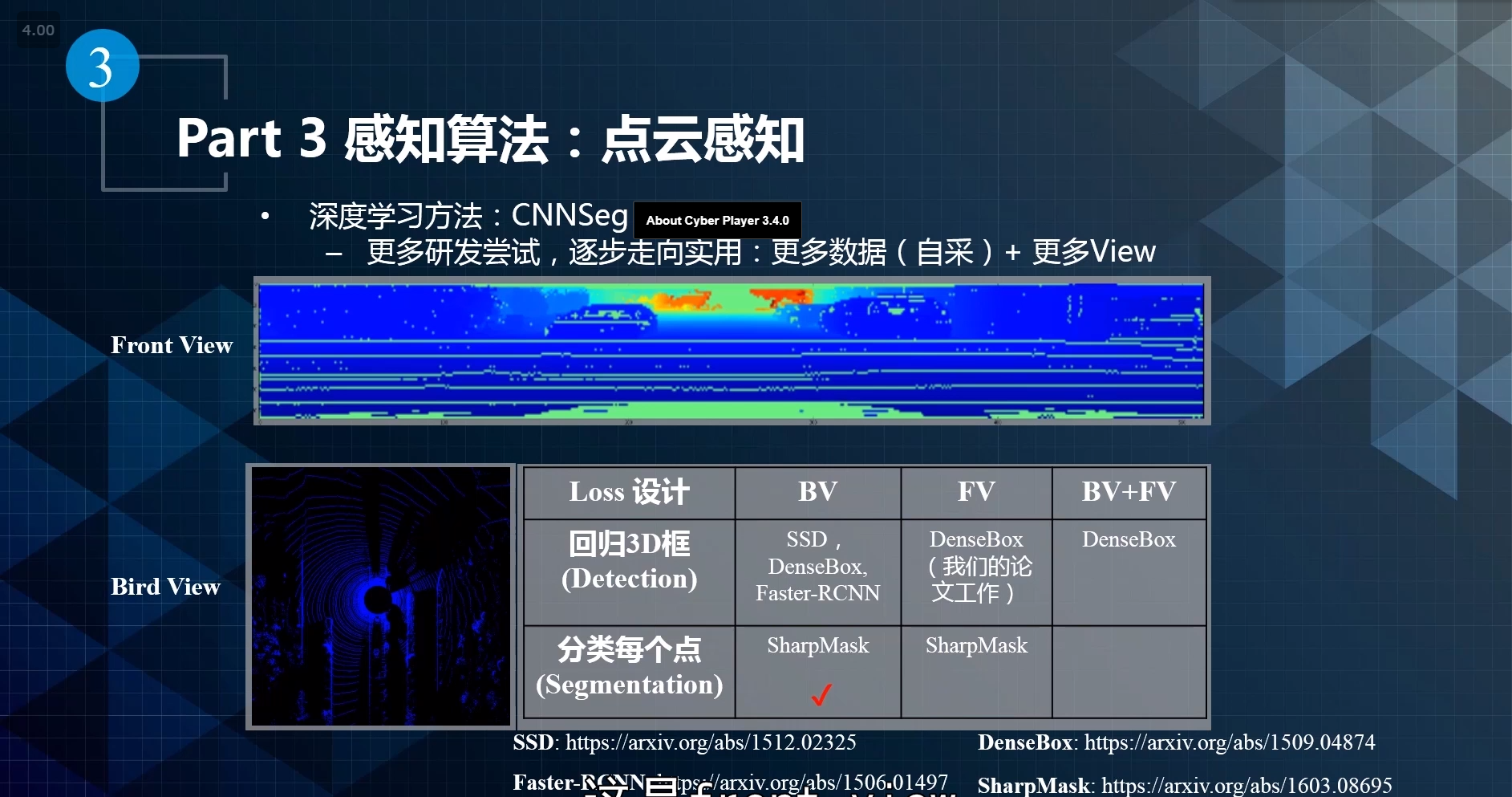
深度学习方法CNNseg:解决无人车点云障碍物检测问题
视觉感知
检测:
CNN分割:
检测与分割:粗细粒度的刻画,方法趋同
场景分割:适合多传感器融合
可行驶区域:障碍物的互补问题,非结构化道路和结构化道路
车道线:分割方法,检测方法。
后处理计算
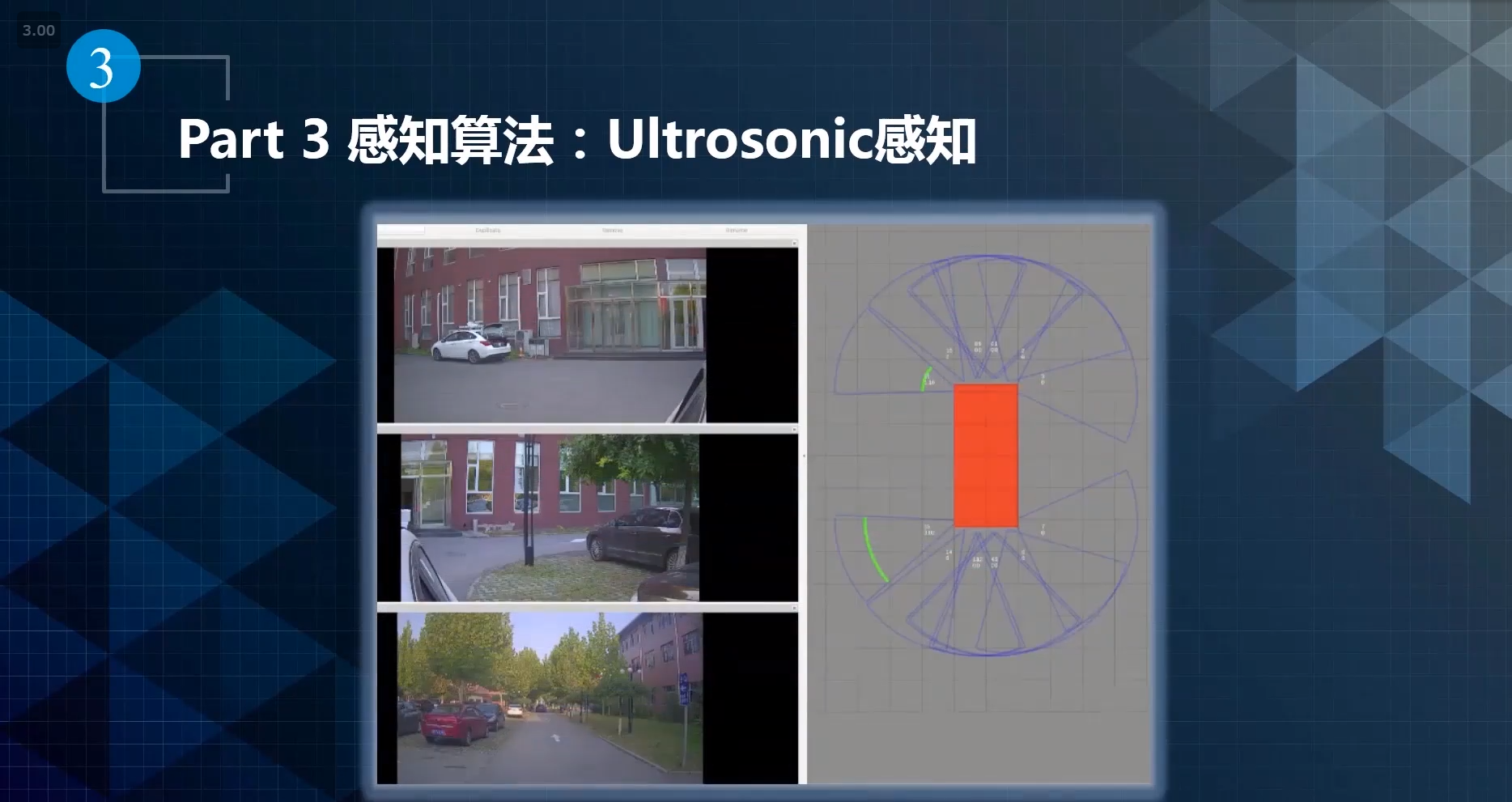
5.感知算法2
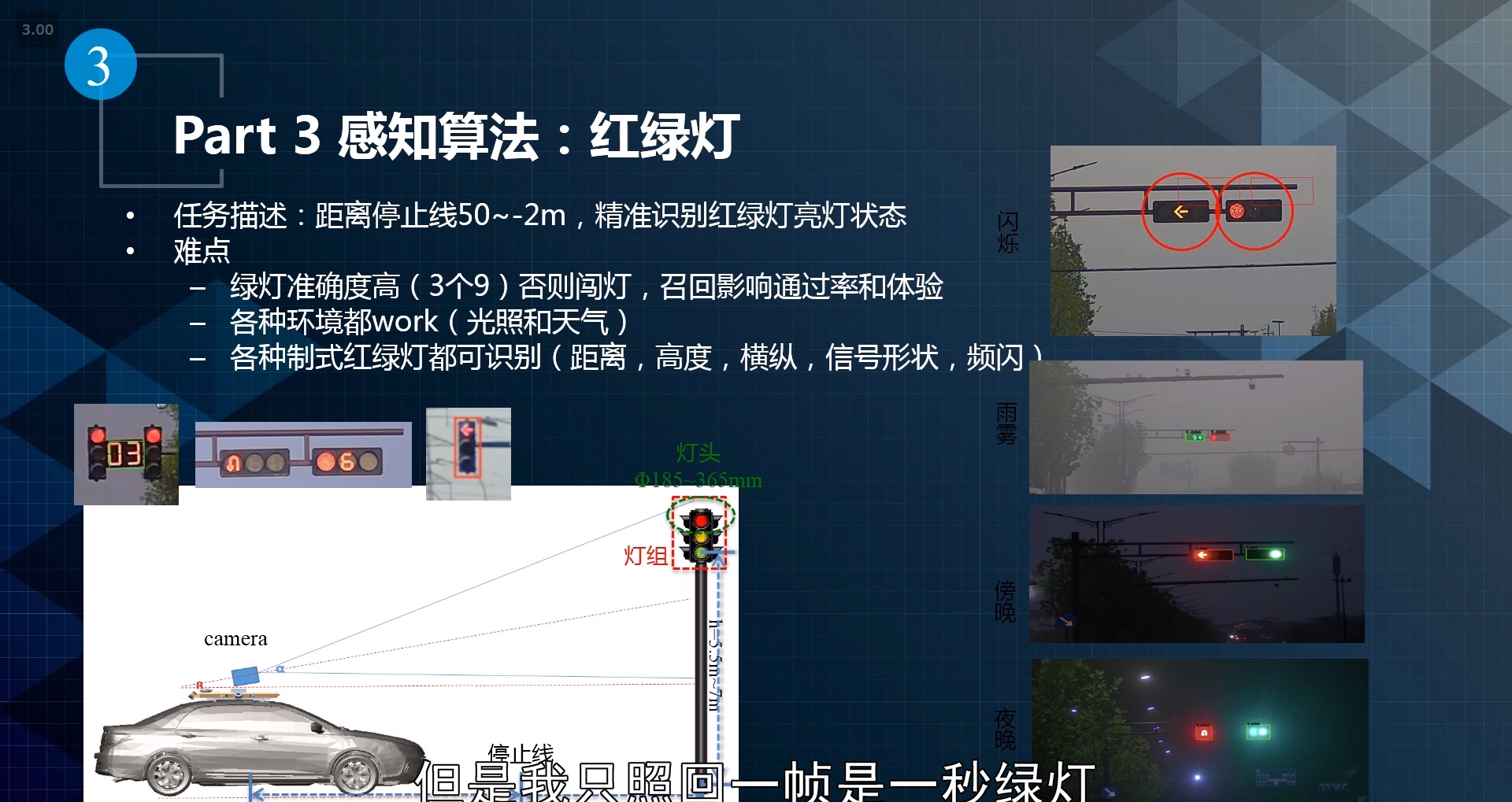
红绿灯

超声波感知
6. 感知中的机器学习
最大问题在于:系统对模块的要求十分严格
7. 感知的未来
点云感知
核心内容:点云的检测分割技术
启发式方法:
深度学习方法CNNseg:解决无人车点云障碍物检测问题
视觉感知
检测与分割:粗细粒度的刻画,方法趋同
场景分割:适合多传感器融合
可行驶区域:障碍物的互补问题,非结构化道路和结构化道路
车道线:分割方法,检测方法。
最大问题在于:系统对模块的要求十分严格

 浙公网安备 33010602011771号
浙公网安备 33010602011771号