
【原创】Linux下如何使用X86 CPU的GPIO
1.前言
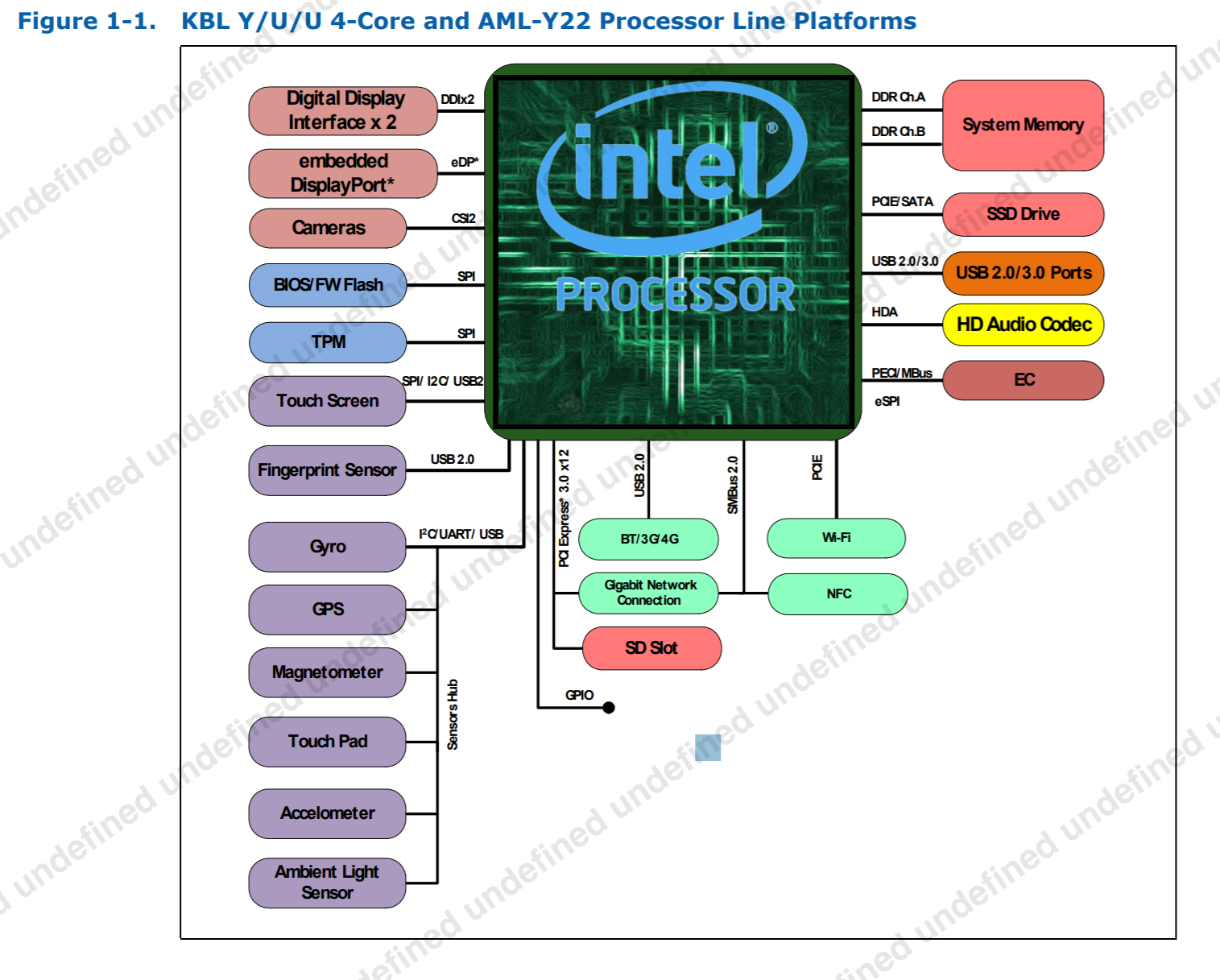
在arm嵌入式开发中,各个外设具有固定的物理地址,我们可以直接通过芯片手册来编写驱动配置后使用。但是在x86中有所不同,所有外设控制器集成在PCH(曾经的南桥)中,每个外设都是作为一个PCI设备挂在PCH的PCI总线上,PCH再通过DMI与CPU相联。对于标压处理器H/K系列(也就是我们台式机),南桥还在主板上,对于x86移动处理器(Y/U结尾系列),已将PCH和CPU集成到同一封装中,与如今各类SOC类似,如下(详见datasheet)。
由于x86中每个外设是一个PCI设备,所以我们要使用某个外设就需要为其分配内存空间映射、IRQ和I/O基址,x86中这些资源配置是由BIOS(UEFI)完成的,因为每块主板设计和外设使用不一样,就需要不一样的配置,所以不同的主板厂商需要定制自己主板的BIOS 。
BIOS配置好主板使用的外设后,一些BIOS(UEFI)通过ACPI(高级配置和电源接口)的DSDT来传递设备信息(类似arm设备树,但功能更强)给操作系统,操作系统解析获取到这些设备信息后我们才能在驱动配置和使用这个外设,但ACPI对各个操作系统有兼容性问题,这就会出现在Windows设备管理器能看到该设备,到linux下什么就也没有的现象,因为桌面CPU大多都是用的Windows系统,所以大部分X86硬件厂商的BIOS主要兼容Windows为主。BIOS又是我们普通开发者无法接触修改的东西,不兼容怎么办。
本文说的GPIO就是这么个问题,linux下无法使用,由于涉及的东西有点多,所以简单介绍在如何将x86工控机引出的GPIO使用起来的(注意:是PCH的GPIO引脚,不是Super IO的GPIO)。
CPU :英特尔7代低压处理器( Kaby Lake) i5-7200U/赛扬3865U
linux:linux 4.0以上
2.linux pinctrl子系统
要使用gpio需要先看一下linux系统PINCTRL子系统,层级如下所示(图片来源蜗窝科技):
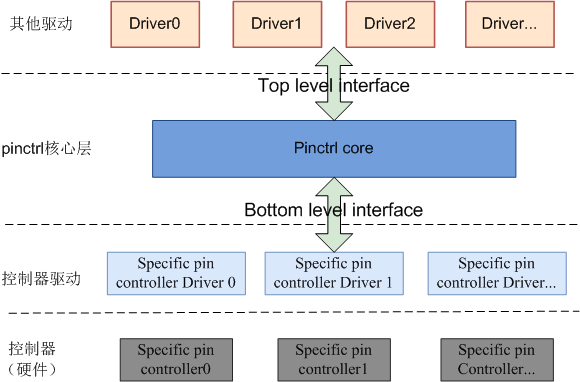
最底层是硬件控制器,其上是操作这些硬件的相关驱动(pin controller driver),不同的控制器有不同底层驱动,一般由芯片厂商BSP完成;pin controller driver初始化的时候会向pin control core模块注册pin control设备(通过pinctrl_register这个bootom level interface)。pin control core模块是一个硬件无关模块,它抽象了所有pin controller的硬件特性,仅仅从用户(各个driver就是pin control subsystem的用户)角度给出了top level的接口函数,这样,各个driver不需要关注pin controller的底层硬件相关的内容,使用时直接向pinctrl子系统申请IO资源即可。关于linux GPIO与pinctrl子系统信息,详见蜗窝科技-GPIO子系统.
pin controller driver成功注册到pin control core后,我们通过pin control core导出到sysfs的文件就可以直接操作一个GPIO,使其输入输出,而不需要专门去写一个驱动模块。
3. pin controller driver
搞嵌入式的一定对platform bus非常熟悉,pin controller driver的注册同样离不开platform bus,driver与device必须经过某种匹配后,才能进一步执行probe注册到系统中。
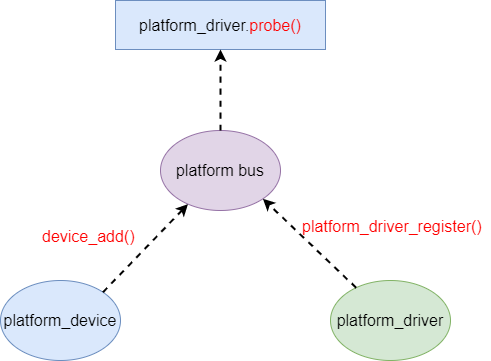
结合前言中对x86设备的描述,platform bus可通过以下两种方式来判断driver和device是否匹配。
- 方式一,由BIOS通过ACPI 中DSDT传递控制器设备节点描述给linux(可类比设备树),linux内核启动过程中解析处理DSDT信息,自动构造device设备并添加到Platform bus,添加过程中匹配ACPI_ID,触发执行pin controller driver 的
probe()函数。 - 方式二,linux扫描PCI总线设备创建设备并添加,PCI驱动匹配vendor、device、class后触发执行pin controller driver 的
probe()函数。
别忘了前提,启动时BIOS必须为使用的PCI设备分配好设备中断号(中断vector)、映射空间地址等我们才能用。那对于我们的GPIO设备linux系统使用的是哪种方式呢,这需要到源码中来看,首先七代系列CPU linux pinctrl driver源码文件为\drivers\pinctrl\intel\pinctrl-sunrisepoint.c,看如下代码。
static const struct acpi_device_id spt_pinctrl_acpi_match[] = {
{ "INT344B", (kernel_ulong_t)&sptlp_soc_data },
{ "INT345D", (kernel_ulong_t)&spth_soc_data },
{ }
};
MODULE_DEVICE_TABLE(acpi, spt_pinctrl_acpi_match);
.....
static struct platform_driver spt_pinctrl_driver = {
.probe = spt_pinctrl_probe,
.driver = {
.name = "sunrisepoint-pinctrl",
.acpi_match_table = spt_pinctrl_acpi_match,
.pm = &spt_pinctrl_pm_ops,
},
};
可以看到使用的是ACPI模式,那么驱动的注册逻辑应该如下,
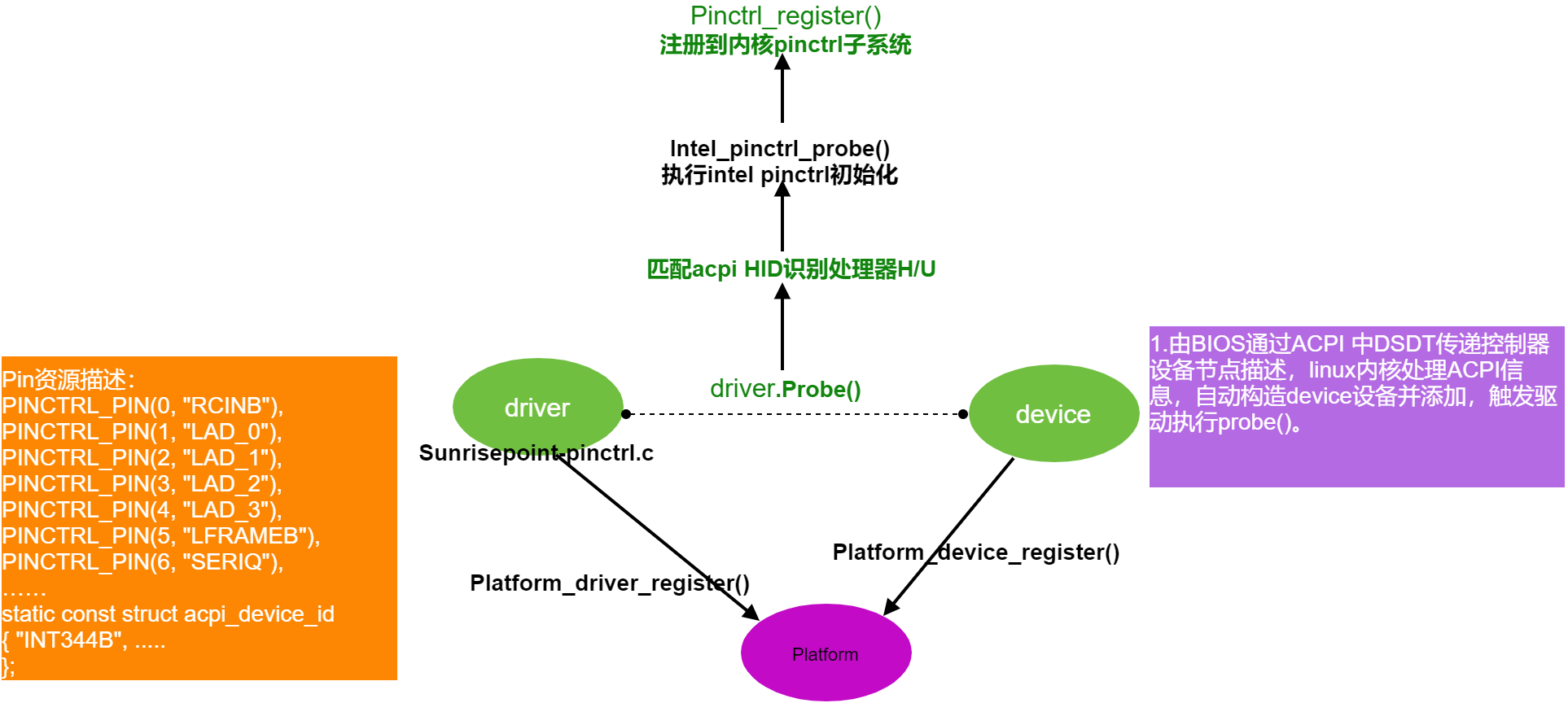
其中driver把系统中所有的pin描述出来,并将driver注册到platform bus。driver需要对应的device才能工作,但是linux因为ACPI的兼容性问题,linux并没有解析DSDT并创建出GPIO 相关的device,所以没有触发执行probe来将pin controller driver注册到pin control core中,pinctrl子系统没有工作当然无法使用。到这里我们去解决内核对ACPI的解析(或者说兼容性问题)显然是不太现实的(自己太菜(╯﹏╰)),有没有其他办法呢?
先阅读源码看看,probe()执行过程中需要用到device的哪些resource,只要我们能获取到这些resource,自己手动构造一个device注册到platform bus不就行了,O(∩_∩)O哈哈~。
int intel_pinctrl_probe(struct platform_device *pdev,
const struct intel_pinctrl_soc_data *soc_data)
{
......
for (i = 0; i < pctrl->ncommunities; i++) {
......
res = platform_get_resource(pdev, IORESOURCE_MEM,
community->barno);//0
regs = devm_ioremap_resource(&pdev->dev, res);
......
}
......
irq = platform_get_irq(pdev, 0);
......
}
可以看到pin controller driver需要pincontrler 的地址空间和使用的中断号两部分资源,其中地址空间是三个,因为所有GPIO由三个GPIO控制器组成,三个GPIO控制器共享相同的中断线,三个GPIO控制器作为一个PCI设备。如何获取这两个信息呢?
4.手动构造device
上面通过阅读源代码得知,intel-pinctrl需要pincontrler 地址空间、和使用的中断号两部分资源。
地址空间起始地址可通过PCI 设备P2SB Bridge (D31:F1)获得。中断vector由BIOS配置,反编译BIOS给linux传递的ACPI信息,看是否有中断vector相关信息:
在板子上进入/sys/firmware/acpi/tables,将目录下所有文件考出,使用acpi工具iasl对DSDT文件进行反编译(关于DSDT详见archwiki):
iasl -d DSDT.dat
得到AML文件 DSDT.dsl,里面包含BIOS开发的各设备节点信息。
打开 DSDT.dsl并找到pin controler设备节点描述,只需要搜索驱动里的"INT344B"或"INT345D"就能定位到。到这里我们也明白了,为什么驱动里的spt_pinctrl_acpi_match[]有两像,原来是一个代表标压处理器(H),一个代表低压处理器(U)。
Device (GPI0)
{
Method (_HID, 0, NotSerialized) // _HID: Hardware ID
{
If ((PCHV () == SPTH))
{
If ((PCHG == 0x02))
{
Return ("INT3451")
}
Return ("INT345D") //表示7代标压处理器
}
Return ("INT344B") //表示7代低压处理器
Name (LINK, "\\_SB.PCI0.GPI0")
Method (_CRS, 0, NotSerialized) // _CRS: Current Resource Settings
{
Name (RBUF, ResourceTemplate ()
{
Memory32Fixed (ReadWrite,
0x00000000, // Address Base
0x00010000, // Address Length 地址空间大小
_Y2E)
Memory32Fixed (ReadWrite,
0x00000000, // Address Base
0x00010000, // Address Length 地址空间大小
_Y2F)
Memory32Fixed (ReadWrite,
0x00000000, // Address Base
0x00010000, // Address Length 地址空间大小
_Y31)
Interrupt (ResourceConsumer, Level, ActiveLow, Shared, ,, _Y30)
{
0x0000000E, //中断号
}
})
CreateDWordField (RBUF, \_SB.PCI0.GPI0._CRS._Y2E._BAS, COM0) // _BAS: Base Address
CreateDWordField (RBUF, \_SB.PCI0.GPI0._CRS._Y2F._BAS, COM1) // _BAS: Base Address
CreateDWordField (RBUF, \_SB.PCI0.GPI0._CRS._Y30._INT, IRQN) // _INT: Interrupts
COM0 = (SBRG + 0x00AF0000)
COM1 = (SBRG + 0x00AE0000)
CreateDWordField (RBUF, \_SB.PCI0.GPI0._CRS._Y31._BAS, COM3) // _BAS: Base Address
COM3 = (SBRG + 0x00AC0000)
IRQN = SGIR /* \SGIR */
Return (RBUF) /* \_SB_.PCI0.GPI0._CRS.RBUF */
}
你可能看不懂上面面的信息,到底哪个是标压哪个是低压?没关系,我们去pin controller driver中,里面有注释,反推一下就知道INT345D代表的是标压,INT344B代表的是低压。
/* Sunrisepoint-LP */
static const struct pinctrl_pin_desc sptlp_pins[] = {
....
}
static const struct intel_pinctrl_soc_data sptlp_soc_data = {
.pins = sptlp_pins,
...
}
.....
/* Sunrisepoint-H */
static const struct pinctrl_pin_desc spth_pins[] = {
....
}
static const struct intel_pinctrl_soc_data spth_soc_data = {
.pins = spth_pins,
...
}
static const struct acpi_device_id spt_pinctrl_acpi_match[] = {
{ "INT344B", (kernel_ulong_t)&sptlp_soc_data },
{ "INT345D", (kernel_ulong_t)&spth_soc_data },
{ }
};
回到正题,我们从 DSDT.dsl获取得到中断号: 0xE,三个地址空间起始地址及大小。构建一个platform_device 如下:
#include <linux/debugfs.h>
#include <linux/ioport.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#define P2SB_PORTID_SHIFT 16
#define P2SB_PORT_GPIO3 0xAC
#define P2SB_PORT_GPIO2 0xAD /*未使用*/
#define P2SB_PORT_GPIO1 0xAE
#define P2SB_PORT_GPIO0 0xAF
#define sbreg_addr 0xfd000000 /*Address Base*/
/*Community 0*/
#define SPT_PINCTRL_COMMUNITY0_OFFSET sbreg_addr + (P2SB_PORT_GPIO0 << P2SB_PORTID_SHIFT)
#define SPT_PINCTRL_COMMUNITY0_SIZE 0x00010000
/*Community 1*/
#define SPT_PINCTRL_COMMUNITY1_OFFSET sbreg_addr + (P2SB_PORT_GPIO1 << P2SB_PORTID_SHIFT)
#define SPT_PINCTRL_COMMUNITY1_SIZE 0x00010000
/*Community 2*/
#define SPT_PINCTRL_COMMUNITY2_OFFSET sbreg_addr + (P2SB_PORT_GPIO2 << P2SB_PORTID_SHIFT)
#define SPT_PINCTRL_COMMUNITY2_SIZE 0x00010000
/*Community 3*/
#define SPT_PINCTRL_COMMUNITY3_OFFSET sbreg_addr + (P2SB_PORT_GPIO3 << P2SB_PORTID_SHIFT)
#define SPT_PINCTRL_COMMUNITY3_SIZE 0x00010000
static struct resource intel_pinctrl_dev_resources[] = {
/* iomem resource */
DEFINE_RES_MEM_NAMED(SPT_PINCTRL_COMMUNITY0_OFFSET, SPT_PINCTRL_COMMUNITY0_SIZE, NULL),
DEFINE_RES_MEM_NAMED(SPT_PINCTRL_COMMUNITY1_OFFSET, SPT_PINCTRL_COMMUNITY1_SIZE, NULL),
// DEFINE_RES_MEM_NAMED(SPT_PINCTRL_COMMUNITY2_OFFSET, SPT_PINCTRL_COMMUNITY2_SIZE, NULL),/*未使用*/
DEFINE_RES_MEM_NAMED(SPT_PINCTRL_COMMUNITY3_OFFSET, SPT_PINCTRL_COMMUNITY3_SIZE, NULL),
/* irq resource */
DEFINE_RES_IRQ(0x0E), /*反编译BIOS DSDT获取*/
};
static struct platform_device intel_pinctrl_device = {
.name = "sunrisepoint-pinctrl",
.id = -1,
.resource = intel_pinctrl_dev_resources,
.num_resources = ARRAY_SIZE(intel_pinctrl_dev_resources),
};
static int __init intel_spt_device_init(void)
{
return platform_device_register(&intel_pinctrl_device);
}
module_init(intel_spt_device_init);
static void __exit intel_spt_device_exit(void)
{
platform_device_unregister(&intel_pinctrl_device);
}
module_exit(intel_spt_device_exit);
MODULE_AUTHOR("wsg1100");
MODULE_DESCRIPTION("Intel sunrisepoint pinctrl device");
MODULE_LICENSE("GPL v2");
修改Makefile。
diff -Naur linux-source-4.4.0/drivers/pinctrl/intel/Makefile linux-source-4.4.0-spi/drivers/pinctrl/intel/Makefile
--- linux-source-4.4.0/drivers/pinctrl/intel/Makefile 2016-01-11 07:01:32.000000000 +0800
+++ linux-source-4.4.0-spi/drivers/pinctrl/intel/Makefile 2018-12-05 18:34:01.224135591 +0800
@@ -4,4 +4,4 @@
obj-$(CONFIG_PINCTRL_CHERRYVIEW) += pinctrl-cherryview.o
obj-$(CONFIG_PINCTRL_INTEL) += pinctrl-intel.o
obj-$(CONFIG_PINCTRL_BROXTON) += pinctrl-broxton.o
-obj-$(CONFIG_PINCTRL_SUNRISEPOINT) += pinctrl-sunrisepoint.o
+obj-$(CONFIG_PINCTRL_SUNRISEPOINT) += pinctrl-sunrisepoint.o pinctrl-platfrom-dev.o
再对pinctrl-sunrisepoint.c稍加修改。
diff -Naur linux-source-4.4.0/drivers/pinctrl/intel/pinctrl-sunrisepoint.c linux-source-4.4.0-spi/drivers/pinctrl/intel/pinctrl-sunrisepoint.c
--- linux-source-4.4.0/drivers/pinctrl/intel/pinctrl-sunrisepoint.c 2016-01-11 07:01:32.000000000 +0800
+++ linux-source-4.4.0-spi/drivers/pinctrl/intel/pinctrl-sunrisepoint.c 2018-12-05 18:34:01.224135591 +0800
@@ -559,7 +559,8 @@
const struct intel_pinctrl_soc_data *soc_data;
const struct acpi_device_id *id;
- id = acpi_match_device(spt_pinctrl_acpi_match, &pdev->dev);
+ id = &spt_pinctrl_acpi_match[0];
if (!id || !id->driver_data)
return -ENODEV;
随内核编译后,加载模块,intel pinctrl子系统正常工作,(o)/。
注意,相同平台,不同BIOS PCI信息可能不同!文中提供的只是一种方法
版权声明:本文为本文为博主原创文章,转载请注明出处,博客地址:https://www.cnblogs.com/wsg1100/。如有错误,欢迎指正。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号