
【原创】xenomai内核解析--xenomai与普通linux进程之间通讯XDDP(二)--实时与非实时关联(bind流程)
版权声明:本文为本文为博主原创文章,转载请注明出处。如有问题,欢迎指正。博客地址:https://www.cnblogs.com/wsg1100/
1.概述
上篇文章介绍了实时端socket创建和配置的流程,本篇文章来看bind操作,实时端与非实时端是如何关联起来的?
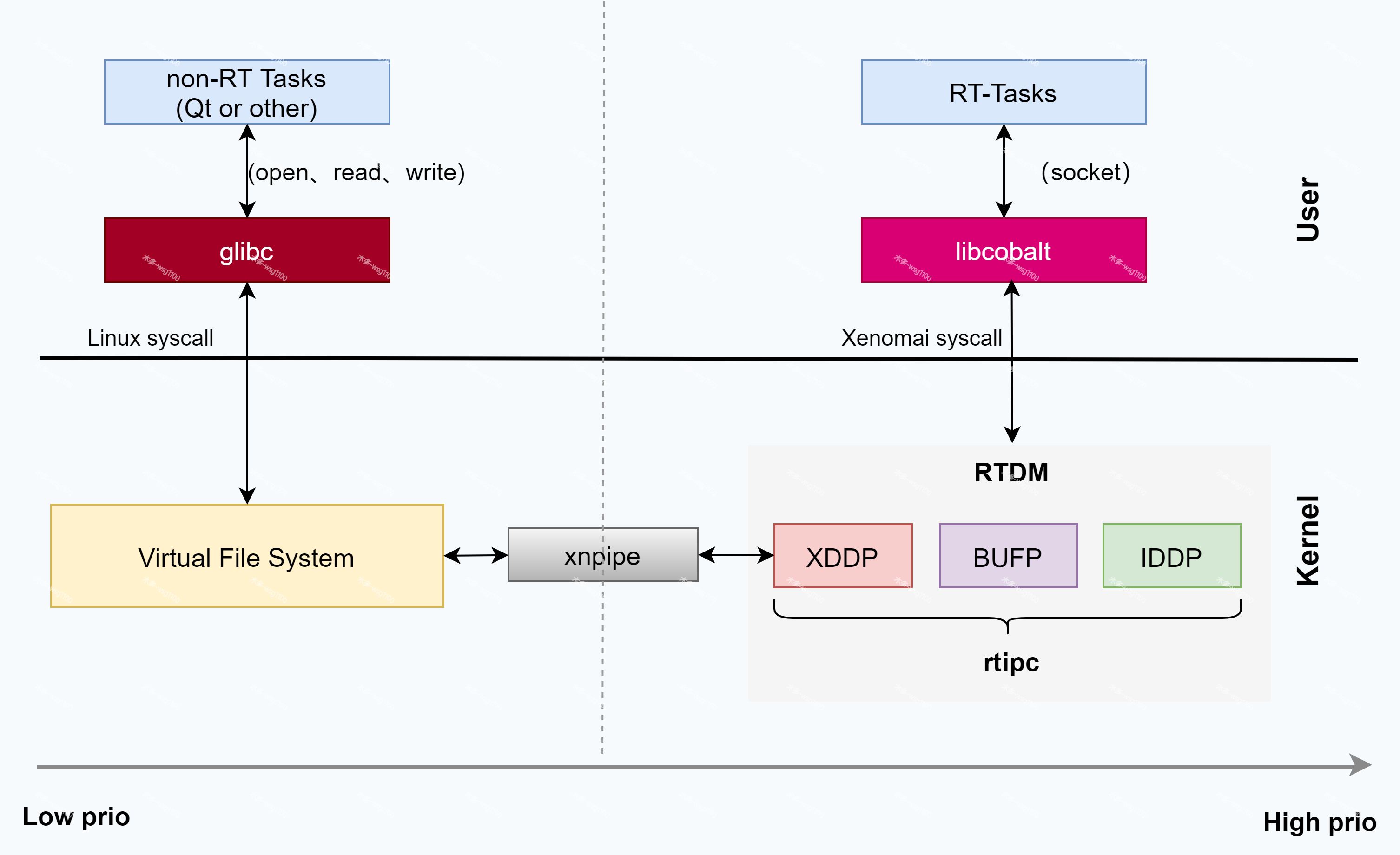
XDDP通讯的底层设备为xnpipe,是linux任务与xenomai任务通讯的核心,在linux看来是一个字符设备,xnpipe在xenomai内核初始化过程初始化,并完成linux端xnipipe字符设备注册。
bind的主要操作就是根据socket配置,分配资源,如指定通讯过程中分配释放的内存池(xnheap)、缓冲区大小等,并根据端口号,分配对应的xnpipe设备,并将rtdm_fd与xnipipe设备通过数组关联(用次设备号作为数组下标,端口号即次设备号)。下面来看详细过程。
2. 解析bind函数
与前面函数一样,用户空间实时任务对socket调用bind()函数,先进入实时库licobalt,再由实时库libcobalt来发起实时内核系统调用:
saddr.sipc_family = AF_RTIPC;
saddr.sipc_port = XDDP_PORT;
ret = bind(s, (struct sockaddr *)&saddr, sizeof(saddr));
/*lib\cobalt\rtdm.c*/
COBALT_IMPL(int, bind, (int fd, const struct sockaddr *my_addr, socklen_t addrlen))
{
.....
ret = do_ioctl(fd, _RTIOC_BIND, &args);
if (ret != -EBADF && ret != -ENOSYS)
return set_errno(ret);
return __STD(bind(fd, my_addr, addrlen));
}
static int do_ioctl(int fd, unsigned int request, void *arg)
{
....
ret = XENOMAI_SYSCALL3(sc_cobalt_ioctl, fd, request, arg);
....
return ret;
}
进入系统调用后执行__xddp_ioctl().
static int __xddp_ioctl(struct rtdm_fd *fd,
unsigned int request, void *arg)
{
struct rtipc_private *priv = rtdm_fd_to_private(fd);
struct sockaddr_ipc saddr, *saddrp = &saddr;
struct xddp_socket *sk = priv->state;
int ret = 0;
switch (request) {
......
COMPAT_CASE(_RTIOC_BIND):/*bind操作*/
ret = rtipc_get_sockaddr(fd, &saddrp, arg);
.......
ret = __xddp_bind_socket(priv, saddrp);
break;
......
}
return ret;
}
前面文章看了__xddp_ioctl()中的COMPAT_CASE(_RTIOC_SETSOCKOPT)分支,现在来看COMPAT_CASE(_RTIOC_BIND),__xddp_bind_socket().
static int __xddp_bind_socket(struct rtipc_private *priv,
struct sockaddr_ipc *sa)
{
struct xddp_socket *sk = priv->state;
struct xnpipe_operations ops;
rtdm_lockctx_t s;
size_t poolsz;
void *poolmem;
...../*参数检查*/
poolsz = sk->poolsz;
if (poolsz > 0) {
poolsz = xnheap_rounded_size(poolsz);//对齐
poolsz += xnheap_rounded_size(sk->reqbufsz);
poolmem = xnheap_vmalloc(poolsz); //ZONE_NORMAL中分配,分配后使用xnhead方式进行管理
......
ret = xnheap_init(&sk->privpool, poolmem, poolsz);/*初始化内存区*/
.......
sk->bufpool = &sk->privpool;
} else
sk->bufpool = &cobalt_heap;
if (sk->reqbufsz > 0) {
sk->buffer = xnheap_alloc(sk->bufpool, sk->reqbufsz);/*从bufpool 分配sk->buffer*/
......
sk->curbufsz = sk->reqbufsz;
}
/*__xddp_bind_socket()剩余部分*/
.......
}
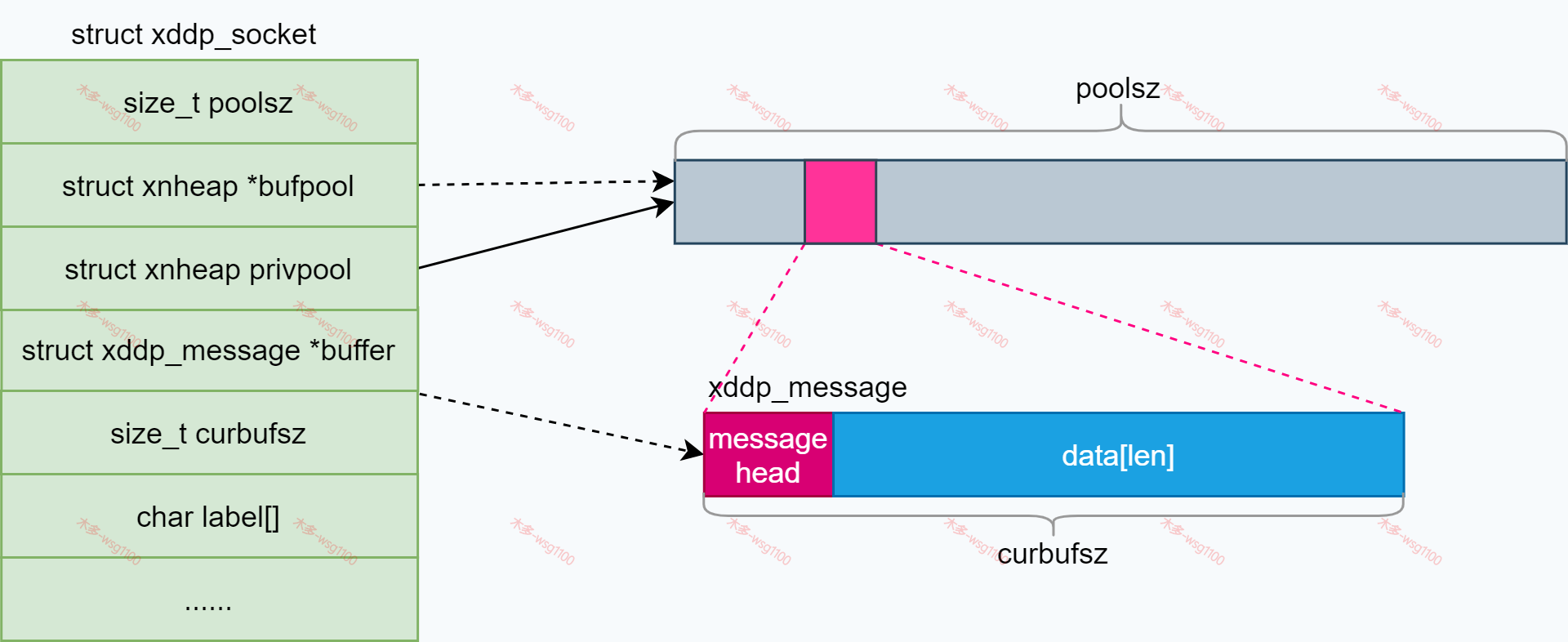
该函数中先检查相关参数的合法性,然后配置xddp本地内存池privpool,上篇文章setsocketopt()只是设置了内存池的大小poolsz,但是还没有真正分配内存,现在开始分配内存,先将内存大小向上页对齐(PAGE_SIZE为4K),由于xenomai内存池管理缘故,每个内存池至少为(2*PAGE_SIZE);然后看看poolsz是否够分配reqbufsz,不够的话向reqbufsz对齐。
大小确定后正式调用linux接口分配,从ZONE_NORMAL中分配,分配后调用xnheap_init()将该内存初始化(具体流程参见文章xenomai内核解析--实时内存管理--xnheap)。然后将bufpool指向该内存池。接着分配数据缓冲区bufpool,从bufpool指向的内存池中分配缓冲区内存。
上面大部分都是关于缓冲区与内存池的设置,到此还没有看到关于数据真正传输控制的东西,__xddp_bind_socket()接着要完成bind相关工作:
static int __xddp_bind_socket(struct rtipc_private *priv,
struct sockaddr_ipc *sa)
{
struct xnpipe_operations ops;
......
/*接上部分*/
sk->fd = rtdm_private_to_fd(priv);
ops.output = &__xddp_output_handler;
ops.input = &__xddp_input_handler;
ops.alloc_ibuf = &__xddp_alloc_handler;
ops.free_ibuf = &__xddp_free_handler;
ops.free_obuf = &__xddp_free_handler;
ops.release = &__xddp_release_handler;
ret = xnpipe_connect(sa->sipc_port, &ops, sk);//将SK与OPS与sipc_port联系起来,绑定端口
.......
sk->minor = ret;
sa->sipc_port = ret;
sk->name = *sa;
/*剩余部分*/
}
先取出rtdm_fd,设置struct xnpipe_operations,struct xnpipe_operations中的ops为xddp通讯过程中buf分配释放的函数;
struct xnpipe_operations {
void (*output)(struct xnpipe_mh *mh, void *xstate);
int (*input)(struct xnpipe_mh *mh, int retval, void *xstate);
void *(*alloc_ibuf)(size_t size, void *xstate);
void (*free_ibuf)(void *buf, void *xstate);
void (*free_obuf)(void *buf, void *xstate);
void (*release)(void *xstate);
};
谁会用到这些buf?xnpipe,xnpipe管理收发的数据包时需要动态管理buf,在具体通讯的时候,我们要为每一个数据包在内核空间临时申请一块内存来存放数据,这块内存的申请释放要足够快,而且不能影响实时性,所以得从xnheap中申请,也就是前面xddp-socket->bufpool指向的内存池,对每块内存的分配释放就是由这个回调函数来完成。需要注意的是,linux端读写数据的时候也是从xddp-socket->bufpool中分配释放内存,这会在后面文章中看到;
还有一些场合,执行内核用户线程需要在数据到来或发送的时候添加一些hook,这通过output()/input()来设置monitor函数。
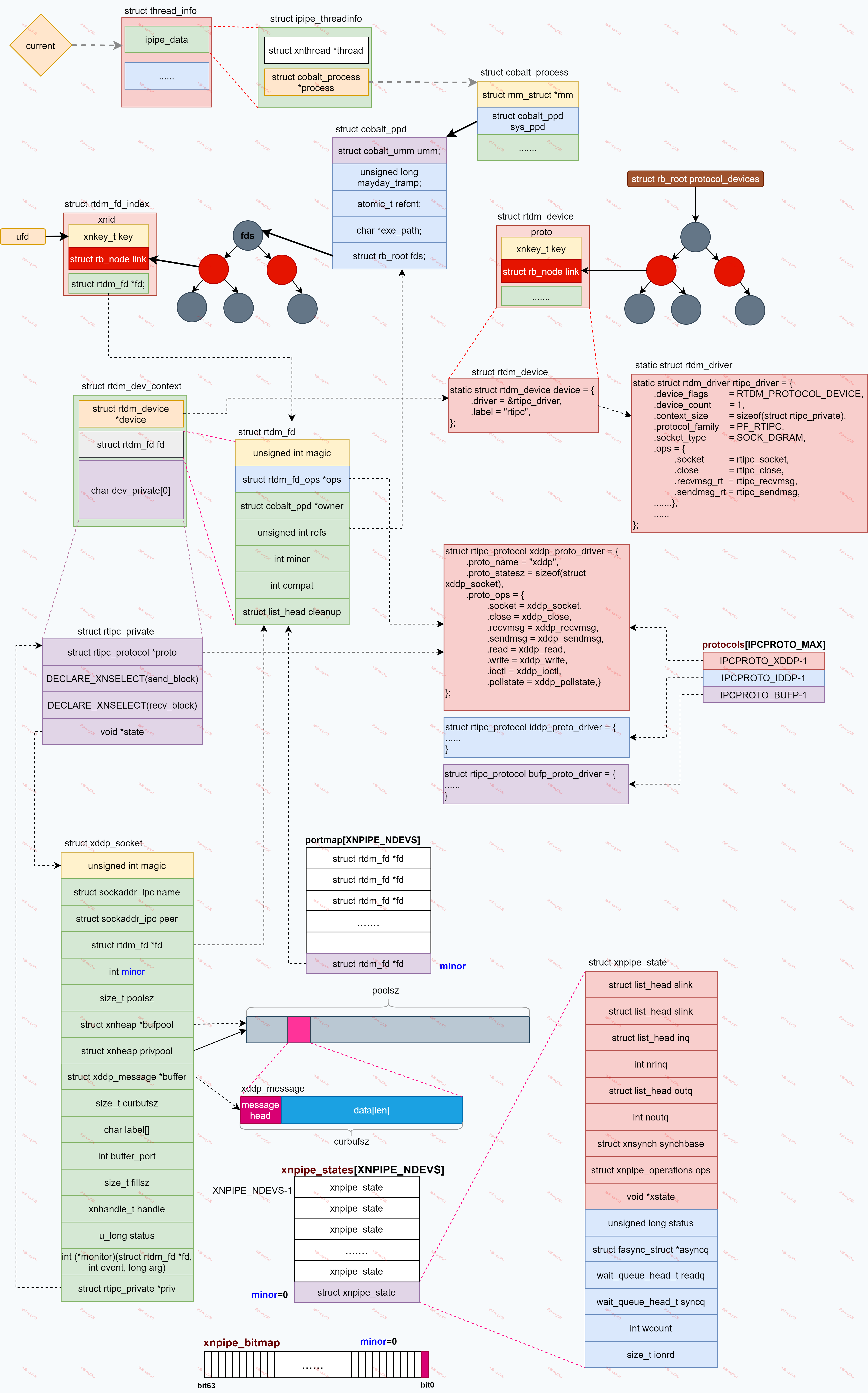
接下来调用xnpipe_connect(sa->sipc_port, &ops, sk)将xddp_socket与linux端的xnipipe函数关联起来,由于xnpipe不是动态分配的,内核配置时确定xnpipe的数量,以数组的形式,这样确保了确定性,linux启动时,xenomai内核初始化过程中就已将xnpipe初始化。
2.1 xnpipe介绍
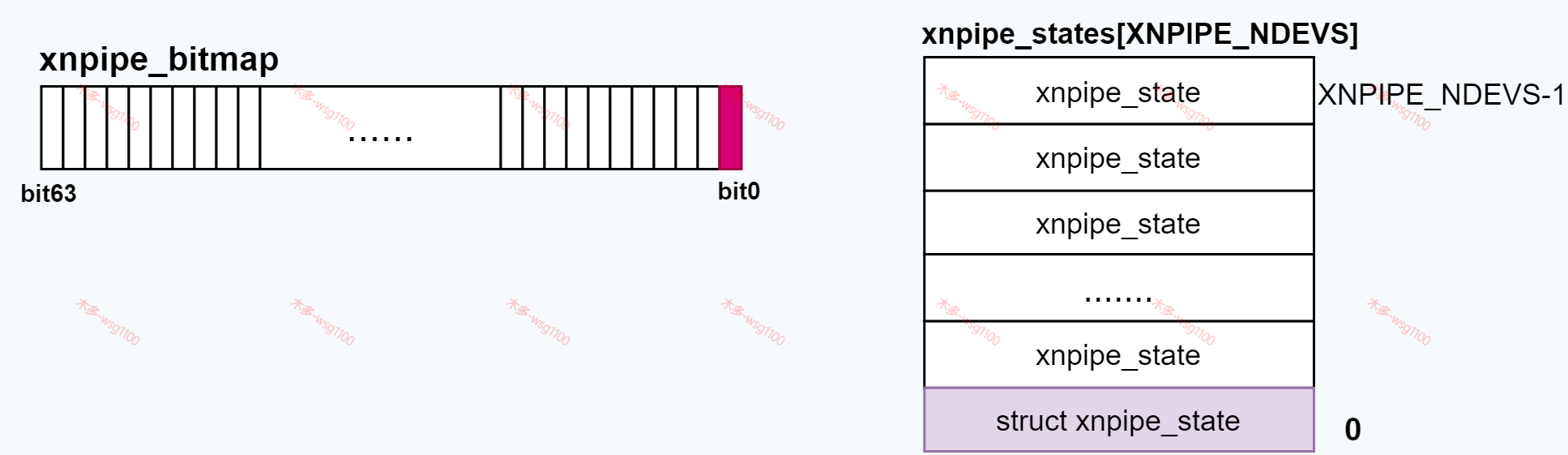
XNPIPE是xenomai内核提供的通讯层,是linux任务与xenomai任务通讯的核心。每个xddp socket对应一个XNPIPE,XNPIPE的个数XNPIPE_NDEVS在内核编译时配置,内核默认配置为32个XNPIPE对象保存在全局数组xnpipe_states[XNPIPE_NDEVS]中,全局bitmap xnpipe_bitmap中记录着XNPIPE对象分配情况,xnpipe_states[]内的xpipe对象在xenomai初始化时初始化,在linux VFS下生成对应的设备节点,后一节说明。
内核xnpipe数量配置menuconfig 项如下:
[*] Xenomai/cobalt --->
Sizes and static limits --->
(32) Number of pipe devices
XNPIPE对象结构struct xnpipe_state如下。
struct xnpipe_state {
struct list_head slink; /* Link on sleep queue */
struct list_head alink; /* Link on async queue */
struct list_head inq; /* in/out是从实时端看的类似USB的端口*/
int nrinq; /*链表节点数,代指消息个数*/
struct list_head outq; /* From kernel to user-space */
int nroutq;
struct xnsynch synchbase;/*同步*/
struct xnpipe_operations ops;/*执行一些hook函数,如释放消息节点的内存,有消息时执行monitor函数等*/
void *xstate; /* xddp是指向 xddp_socket */
/* Linux kernel part */
unsigned long status;/*状态标识*/
struct fasync_struct *asyncq;
wait_queue_head_t readq; /* linux端读等待队列*/
wait_queue_head_t syncq; /*linux端写同步等待队列*/
int wcount; /* 这个设备节点的进程数量*/
size_t ionrd; /*缓冲包数据长度*/
};
最为linux任务与xenomai任务通讯的中间人,struct xnpipe_state成员分为两个部分,首先看xenomai相关成员
- slink、alink 链接到xnpipe睡眠队列 、async 队列。
- inq 实时端接收数据包队列,其中的in是相对xenomai端来说的,每个链表节点表示一个数据包,包个数用成员
nrinq记录。 - outq 实时端发送数据包队列,其中的out是相对xenomai端来说的,每个链表节点表示一个数据包,包个数用成员
nroutq记录。 - synchbase xenomai资源同步对象,当没有数据时会阻塞在
xnsynch等待资源可用。 - ops 动态发送数据过程中执行的回调函数。
- xstate 指向私有数据,对于xddp指向xddp_socket。
接着是linux相关成员:
-
status linux端收发操作状态码,各状态码定义如下
#define XNPIPE_KERN_CONN 0x1 /*内核端(rt)已连接*/ #define XNPIPE_KERN_LCLOSE 0x2 /*内核端(rt)关闭*/ #define XNPIPE_USER_CONN 0x4 /*用户端(nrt)已链接*/ #define XNPIPE_USER_SIGIO 0x8 /*用户(nrt)已设置异步通知*/ #define XNPIPE_USER_WREAD 0x10 /*用户(nrt)端读*/ #define XNPIPE_USER_WREAD_READY 0x20 /*用户端(nrt)读就绪*/ #define XNPIPE_USER_WSYNC 0x40 /*用户端(nrt)写同步*/ #define XNPIPE_USER_WSYNC_READY 0x80 /*rt端已读数据,待完成写同步唤醒nrt*/ #define XNPIPE_USER_LCONN 0x100 /*(nrt)端正在执行连接操作*/ -
asyncq 异步通知队列用于linux端poll操作。
-
readq linux端读等待队列,当没有数据时会在该队列上阻塞,知道有数据可读。
-
syncq linux端写同步队列,对同步发送的数据包,会在该队列上阻塞知道数据包被实时端读取。
-
wcount 使用同一个xnpipe的linux端进程数。
-
ionrd 缓冲区数据包长度。
2.2 xnpipe与xddp_socket关联
回到__xddp_bind_socket()接着调用xnpipe_connect()开始执行bind工作,sa->sipc_port中保存着我们要使用的rtipc端口(XNPIPE),如果为-1表示自动分配,自动分配后Linux端可通过上节设置的label来找到该xddp。
int xnpipe_connect(int minor, struct xnpipe_operations *ops, void *xstate)
{
struct xnpipe_state *state;
int need_sched = 0, ret;
spl_t s;
minor = xnpipe_minor_alloc(minor);
.....
state = &xnpipe_states[minor];
xnlock_get_irqsave(&nklock, s);
ret = xnpipe_set_ops(state, ops);
.....
state->status |= XNPIPE_KERN_CONN;
xnsynch_init(&state->synchbase, XNSYNCH_FIFO, NULL);
state->xstate = xstate;
state->ionrd = 0;
if (state->status & XNPIPE_USER_CONN) {
if (state->status & XNPIPE_USER_WREAD) {
/*
* Wake up the regular Linux task waiting for
* the kernel side to connect (xnpipe_open).
*/
state->status |= XNPIPE_USER_WREAD_READY;
need_sched = 1;
}
if (state->asyncq) { /* Schedule asynch sig. */
state->status |= XNPIPE_USER_SIGIO;
need_sched = 1;
}
}
if (need_sched)
xnpipe_schedule_request();
xnlock_put_irqrestore(&nklock, s);
return minor;
}
在xnpipe_connect中首先根据传入的sa->sipc_port,分配对应的XNPIPE设备号minor。
static inline int xnpipe_minor_alloc(int minor)
{
......
if (minor == XNPIPE_MINOR_AUTO)//(-1)表示自动分配端口
minor = find_first_zero_bit(xnpipe_bitmap, XNPIPE_NDEVS);
if (minor == XNPIPE_NDEVS ||
(xnpipe_bitmap[minor / BITS_PER_LONG] &
(1UL << (minor % BITS_PER_LONG))))
minor = -EBUSY;
else
xnpipe_bitmap[minor / BITS_PER_LONG] |=
(1UL << (minor % BITS_PER_LONG));
.....
return minor;
}
xnpipe_minor_alloc()就是去xnpipe_bitmap中查看我们要bind的rtipc_port是否已经被使用,指定-1则表示自动分配。得到可用的minor后,就去xnpipe_states[]中得到对应的struct xnpipe_state,配置到xnpipe的ops,初始化xenomai资源同步对象state->synchbase,设置状态掩码为rt已链接,如果nrt此时也处于open xddp设备状态,唤醒 Linux任务,以等待linux内核端连接。
接着__xddp_bind_socket()剩余部分,如果我们设置的是使用label方式,自动分配的端口号,就调用xnregistry_enter注册一个实时对象xnregistry,以便linux端通过路径/proc/xenomai/registry/rtipc/xddp/%s来打开通讯端点。
将分配的XNPIPE minor与rddm_fd对应关系保存到portmap[]中;
static int __xddp_bind_socket(struct rtipc_private *priv,
struct sockaddr_ipc *sa)
{
/* Set default destination if unset at binding time.*/
if (sk->peer.sipc_port < 0)
sk->peer = *sa;
if (poolsz > 0)
xnheap_set_name(sk->bufpool, "xddp-pool@%d", sa->sipc_port);
if (*sk->label) {/*使用xlabel*/
ret = xnregistry_enter(sk->label, sk, &sk->handle,
&__xddp_pnode.node);
.......
}
cobalt_atomic_enter(s);
portmap[sk->minor] = rtdm_private_to_fd(priv);
__clear_bit(_XDDP_BINDING, &sk->status);
__set_bit(_XDDP_BOUND, &sk->status);
if (xnselect_signal(&priv->send_block, POLLOUT))
xnsched_run();
cobalt_atomic_leave(s);
return 0;
}
到此分配好了一个XNPIPE对象,内核所有数据结构初始化好,实时应用可以使用该socket发送接收数据了。
3. xnpipe设备注册流程
上面仅简单说明了xnpipe_state,没有看xnpipe在linux端注册的具体过程,其实就是注册一个字符设备,xnpipe在linux端的初始化是在xenomai内核初始化过程中调用xnpipe_mount()完成初始化。
static int __init xenomai_init(void)
{
......
ret = xnpipe_mount(); /*注册进程间通讯管道xnpipe*/
......
}
static struct file_operations xnpipe_fops = {
.read = xnpipe_read,
.write = xnpipe_write,
.poll = xnpipe_poll,
.unlocked_ioctl = xnpipe_ioctl,
.open = xnpipe_open,
.release = xnpipe_release,
.fasync = xnpipe_fasync
};
int xnpipe_mount(void)
{
struct xnpipe_state *state;
struct device *cldev;
int i;
for (state = &xnpipe_states[0];
state < &xnpipe_states[XNPIPE_NDEVS]; state++) {
state->status = 0;
state->asyncq = NULL;
INIT_LIST_HEAD(&state->inq); /*初始化数据包链表*/
state->nrinq = 0;
INIT_LIST_HEAD(&state->outq);/*初始化数据包链表*/
state->nroutq = 0;
}
/*创建class*/
xnpipe_class = class_create(THIS_MODULE, "frtpipe");
if (IS_ERR(xnpipe_class)) {
printk(XENO_ERR "error creating rtpipe class, err=%ld\n",
PTR_ERR(xnpipe_class));
return -EBUSY;
}
/*创建设备*/
for (i = 0; i < XNPIPE_NDEVS; i++) { /*创建rtp1-rtpn*/
cldev = device_create(xnpipe_class, NULL,
MKDEV(XNPIPE_DEV_MAJOR, i),
NULL, "rtp%d", i);
.......
}
/*注册字符设备*/
if (register_chrdev(XNPIPE_DEV_MAJOR, "rtpipe", &xnpipe_fops)) {
......
}
/*注册xenomai与linux间异步唤醒虚拟中断*/
xnpipe_wakeup_apc =
xnapc_alloc("pipe_wakeup", &xnpipe_wakeup_proc, NULL);
return 0;
}
3.1 xnpipe初始化与设备创建
xnpipe_mount()中,内核构建的时候我们在指定了多少个xnipipe就要注册多少个字符设备
-
将xnpipe_states[]内的xnpipe对象初始化。
-
创建设备类.
-
创建设备.
device_create() ->device_create_vargs() ->device_create_groups_vargs() ->dev = kzalloc(sizeof(*dev), GFP_KERNEL); ->retval = device_add(dev);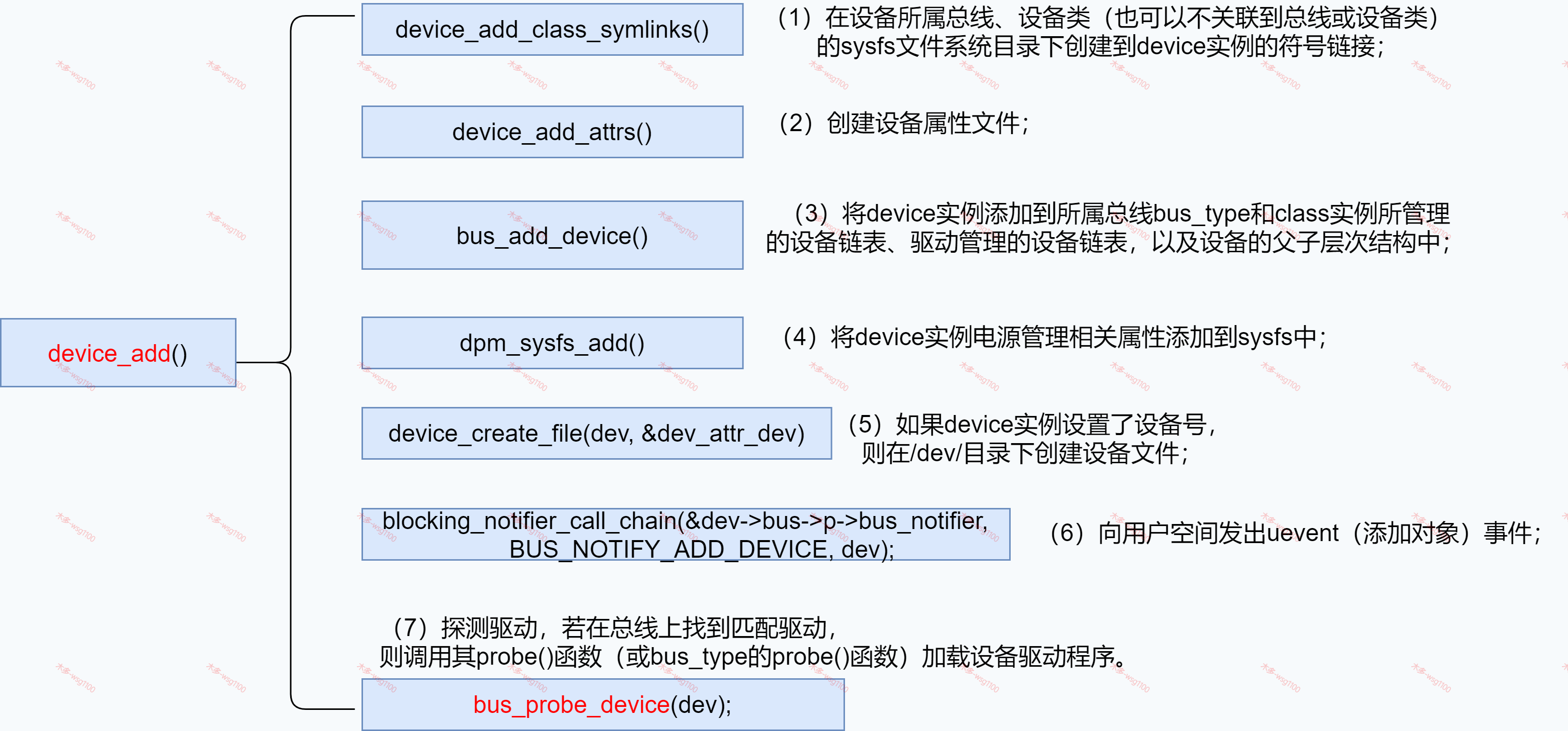
设备添加过程中,向用户空间发出uevent(添加对象)事件,用户空间的守护进程
systemd-udevd监听到该事件后,systemd-udevd在/dev下生成设备节点/dev/rtpX.
3.2注册rtpipe设备
接着注册字符设备,将file_operation与cdev实列关联,其file_operations为xnpipe_fops.linux端最终通过这些接口来操作设备/dev/rtpX来与xenomai 应用通讯。
static struct file_operations xnpipe_fops = {
.read = xnpipe_read,
.write = xnpipe_write,
.poll = xnpipe_poll,
.unlocked_ioctl = xnpipe_ioctl,
.open = xnpipe_open,
.release = xnpipe_release,
.fasync = xnpipe_fasync
};
int __register_chrdev(unsigned int major, unsigned int baseminor,
unsigned int count, const char *name,
const struct file_operations *fops)
{
struct char_device_struct *cd;
struct cdev *cdev;
int err = -ENOMEM;
cd = __register_chrdev_region(major, baseminor, count, name);
cdev = cdev_alloc();
cdev->owner = fops->owner;
cdev->ops = fops;
kobject_set_name(&cdev->kobj, "%s", name);
err = cdev_add(cdev, MKDEV(cd->major, baseminor), count);
cd->cdev = cdev;
return major ? 0 : cd->major;
}
字符设备在内核设备数据库中由cdev结构体表示,字符设备驱动程序的主要工作就是创建并向内核注册cdev实例。注册的方式是调用 __register_chrdev_region,传入注册字符设备的主次设备号和名称(这里需要注意了,次设备号就是数组下标,也就是我们bind的端口号),然后分配一个 struct cdev 结构,将 cdev 的 ops 成员变量指向这个模块声明的 file_operations。然后,cdev_add 会将这个字符设备添加到内核中一个叫作 struct kobj_map *cdev_map 的结构,来统一管理所有字符设备。
其中,MKDEV(cd->major, baseminor) 表示将主设备号和次设备号生成一个 dev_t 的整数,然后将这个整数 dev_t 和 cdev 关联起来。
int cdev_add(struct cdev *p, dev_t dev, unsigned count)
{
int error;
p->dev = dev;
p->count = count;
error = kobj_map(cdev_map, dev, count, NULL,
exact_match, exact_lock, p);
kobject_get(p->kobj.parent);
return 0;
}
3.3 注册xnpipe_wakeup_apc
接着注册一个异步过程调用(Asynchronous Procedure Call)xnpipe_wakeup_apc,apc基于ipipe虚拟中断。通过APC,Xenomai域中的活动可以让在Linux内核重新获得控制后,让要延迟处理的程序尽快的在linux域中调度。
xnpipe_wakeup_apc是ipipe实现的一种虚拟中断机制,主要用于xenomai内核与linux内核的事件通知,其处理过程和ipipe处理硬件中断一致,所以实时性好。其具体实现会在ipipe系列文章中详细解析,敬请关注本博客。
现简单说明其作用:linux端一个任务\(nrt\)与xenomai实时任务\(rt\)使用xddp进行通讯,此时\(nrt\)读阻塞等待数据,当\(rt\)向\(nrt\)发送数据后,xenomai内核就会发送一个xnpipe_wakeup_apc,由于是基于ipipe虚拟中断实现,相当于给linux发送了一个中断,发送后会将该虚拟中断暂时在linux域挂起,当linux得到运行时才会去处理该虚拟中断的handler,进而知道可以唤醒阻塞的\(nrt\),这个过程中完全是在xenomai域完成的,对xenomai实时性没有任何影响。
后续文章将从linux端、实时端的数据收发接口进行解析XDDP的详细通讯过程,请关注本博客。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号