
信号与系统02 系统知识点
 系统知识点
系统知识点
1. 系统知识点
1.1. 系统的表示
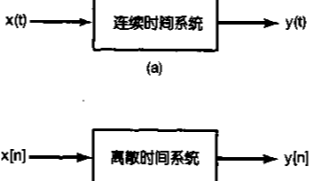
- 箭头/方框表示 \(f(t)\to y(t)\),\(f(t)\to \boxed{H} \to y(t)\)
- 算子表示 \(y(t)=H[f(t)]\)
- 数学模型表示(差分方程或微分方程)
1.2. 系统的分类
1.2.1. 连续/离散时间系统
将连续时间输入信号变换为连续时间的输出信号的系统,称为连续时间系统;
将离散时间输入信号变换为离散时间的输出信号的系统,称为离散时间系统。
1.2.2. 线性/非线性系统
线性系统满足3个条件:
-
系统具有分解性
系统的全响应可以分解为只由初始状态引起的零输入响应\(y_{_x}(t)/y_{_0}[n]\)和只由输入引起的零状态响应\(y_{_f}(t)/y_{_x}[n]\)之和,记为:
\[\begin{aligned} y(t) &= y_{_x}(t) + y_{_f}(t)\\ y[n] &= y_{_0}[n] + y_{_x}[n] \end{aligned} \] -
系统具有零输入线性
\[\begin{aligned} ay_1(0) + by_2(0) &\to ay_{x_1}(0) + by_{x_2}(0) \\ ay_1[0] + by_2[0] &\to ay_{_{0_1}}[0] + by_{_{0_2}}[0] \\ \end{aligned} \] -
系统具有零状态线性
\[\begin{aligned} ax_1(t) + bx_2(t) &\to ay_{_{f_1}}(t) + by_{_{f_2}}(t) \\ ax_1[n] + bx_2[n] &\to ay_{_{x_1}}[n] + by_{_{x_2}}[n] \\ \end{aligned} \]
【例】
- 典型的不满足可分解性的例子就有:\(y(t) = y(0)x(t)\)
一般的时候会遇到零输入响应为0的情况,此时只需判断的零状态响应线性即可(如 \(y(t)=tf(t)\) )。
但是如果零输入响应为一个非零的常数(此时不满足线性),则此系统为增量线性系统(假设满足零状态响应线性),仍属于非线性系统。 - 根据定义很容易判断零输入/零状态是否线性,比如常见的 \(y(t)=f^2(t)\) 就是典型的非线性,另外像微分算子 \(y(t)=\frac{df(t)}{dx}\),积分算子 \(y(t)=\int_{-\infty}^{t} f(\tau) d\tau\) 都是的线性算子。
1.2.3. 时变/时不变系统
系统的时不变性指的是:输入信号在时间上有一个平移,系统的零状态响应也会产生一个同样的时间上的平移,即:
如果 \(f(t)\to y_{_f}(t)\),则 \(f(t-t_0) \to y_{_f}(t-t_0)\)或
如果 \(x[n]\to y_{_x}[n]\),则 \(x[n-n_0]\to y_{_x}[n-n_0]\);
【注意】 特别小心这种“时间反转、扩展压缩”的信号,如:
\[\begin{aligned}
& y(t) = x(at),如
\begin{cases}
y(t) = x(2t)\\
y(t) = x(-t)
\end{cases}
均为时移系统,\\
& \begin{cases}
y(t) = \int_{-\infty}^{2t} x(\tau) d\tau 为时移系统\\
y(t) = \int_{-\infty}^{t} x(\tau) d\tau 为时不变系统\\
\end{cases};
\end{aligned}
\]
还有一种就是“输入信号与时间函数”的乘积,如 \(y(t)=tf(t), y(t)=\sin(t)f(t)\) 等均是时移系统。
1.2.4. 因果/非因果系统
因果系统的当前输出只与当前时刻或当前时刻之前的输入有关,而与未来的输入无关,又称为“物理可实现系统”。
非因果系统的输出与未来的时刻的输入有关。
【注意】 从定义上很容易判断出,注意几个特殊的:
-
“时间反转、扩展压缩”的信号
\[y(t)=f(at) \begin{Bmatrix} y(t) = f(2t),& y(1) = f(2)\\ y(t) = f(\frac{1}{2}t),& y(-1) = f(-\frac{1}{2})\\ y(t) = f(-t),& y(-1) = f(1)\\ y(t) = f(-\frac{1}{2}t),& y(-1)=f(\frac{1}{2})\\ y(t) = f(-2t),& y(-1)=f(2)\\ \end{Bmatrix} 非因果 \] -
微分、差分等运算
\[\begin{aligned} y(t) &= \frac{df(t)}{dt} = \lim_{\Delta t \to 0} \frac{f(t + \Delta t) - f(t)}{\Delta t}, \Delta t 可正可负,故为非因果系统;\\ y[n] &= \Delta x[n] = x[n+1] - x[n],前向差分为非因果系统;\\ y[n] &= \triangledown x[n] = x[n] - x[n-1],后向差分为因果系统;\\ y(t) &= \int_{-\infty}^{2t} f(\tau) d\tau ,时间压缩了,也是非因果系统。 \end{aligned} \]
1.2.5. 稳定/非稳定系统
对于任意一个有界输入,输出也有界的系统为稳定系统。
1.2.6. 记忆/无记忆系统
-
无记忆系统
系统的输出信号只取决于当前时刻的激励信号,而与过去的工作状态无关(如纯电阻电路)
-
有记忆系统
系统的输出信号不仅取决于当前时刻的激励信号,而与过去的输入有关(如含有电感,电容的电路)
1.3. 系统的互联
-
串联
-
并联
-
反馈

