OpenCV三种立体匹配求视差图算法总结
对OpenCV中涉及的三种立体匹配算法进行代码及各自优缺点总结:
首先我们看一下BM算法:
该算法代码:
其中minDisparity是控制匹配搜索的第一个参数,代表了匹配搜苏从哪里开始,numberOfDisparities表示最大搜索视差数uniquenessRatio表示匹配功能函数,这三个参数比较重要,可以根据实验给予参数值。
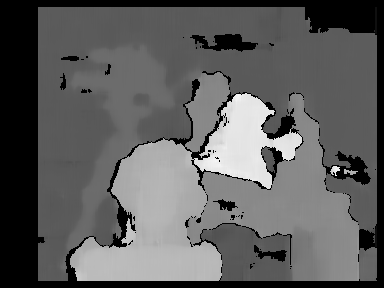
该方法速度最快,一副320*240的灰度图匹配时间为31ms,视差图如下。
第二种方法是SGBM方法这是OpenCV的一种新算法:
各参数设置如BM方法,速度比较快,320*240的灰度图匹配时间为78ms,视差效果如下图。

第三种为GC方法:
该方法速度超慢,但效果超好。

各方法理论可以参考文献。
出处:http://blog.csdn.net/mailang2008/archive/2010/09/09/5873883.aspx
作者:wqvbjhc
出处:https://www.cnblogs.com/wqvbjhc/
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任
出处:https://www.cnblogs.com/wqvbjhc/
版权:本文版权归作者和博客园共有
转载:欢迎转载,但未经作者同意,必须保留此段声明;必须在文章中给出原文连接;否则必究法律责任

