games101_Homework1
本次作业的任务是填写一个旋转矩阵和一个透视投影矩阵。给定三维下三个 点 v0(2.0, 0.0, −2.0), v1(0.0, 2.0, −2.0), v2(−2.0, 0.0, −2.0), 你需要将这三个点的坐 标变换为屏幕坐标,并在屏幕上绘制出对应的线框三角形 (在代码框架中,我们 已经提供了 draw_triangle 函数,所以你只需要去构建变换矩阵即可)。简而言 之,我们需要进行模型、视图、投影、视口等变换来将三角形显示在屏幕上。在 提供的代码框架中,我们留下了模型变换和投影变换的部分给你去完成。
作业解答:
作业1:get_model_matrix(float rotation_angle): 逐个元素地构建模型变换矩 阵并返回该矩阵。在此函数中,你只需要实现三维中绕 z 轴旋转的变换矩阵, 而不用处理平移与缩放。该项只要求我们传入一个旋转角度然后返回一个旋转矩阵即可。(很简单)


Eigen::Matrix4f get_model_matrix(float rotation_angle) { Eigen::Matrix4f model = Eigen::Matrix4f::Identity(); // TODO: Implement this function // Create the model matrix for rotating the triangle around the Z axis. // Then return it. // Rz matrix is (cosa, -sina, 0, 0)(sina, cosa, 0, 0)(0, 0, 1, 0)(0, 0, 0, 1) Eigen::Matrix4f Rz; Rz << cos(rotation_angle / 180.0 * MY_PI), -sin(rotation_angle / 180.0 * MY_PI), 0, 0, sin(rotation_angle / 180.0 * MY_PI), cos(rotation_angle / 180.0 * MY_PI), 0, 0, 0, 0, 1, 0, 0, 0, 0, 1; return Rz * model; }
作业2:get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar): 使用给定的参数逐个元素地构建透视投影矩阵并返回 该矩阵。该项要求通过已知条件写出投影矩阵,这个需要用到L4、L5中提到的知识,即MVP变换。
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio, float zNear, float zFar) { // Students will implement this function Eigen::Matrix4f projection = Eigen::Matrix4f::Identity(); // TODO: Implement this function // Create the projection matrix for the given parameters. // Then return it. // Get t、r、l、b by eye_fov and aspect_ration float t = abs(zNear) * tanf(eye_fov / 2); // tan需传入角度,tanf传入一个float弧度返回一个float,此处fov/2为弧度值 float r = t * aspect_ratio; float l = -r; float b = -t; // Create the perspective projection matrix Mpo Eigen::Matrix4f Mpo = Eigen::Matrix4f::Identity();; Mpo << zNear, 0, 0, 0, 0, zNear, 0, 0, 0, 0, zNear + zFar, -(zFar * zFar), 0, 0, 1, 0; // Create the orthographic projection matrix Mor Eigen::Matrix4f MorTran = Eigen::Matrix4f::Identity(); //Mor平移矩阵 MorTran << 1, 0, 0, -((l + r) / 2), 0, 1, 0, -((t + b) / 2), 0, 0, 1, -((zNear + zFar) / 2), 0, 0, 0, 1; Eigen::Matrix4f MorScal = Eigen::Matrix4f::Identity(); //Mor大小变换矩阵 MorScal << 2 / (r - l), 0, 0, 0, //Notice: t\r\l\b need be float 0, 2 / (t - b), 0, 0, 0, 0, 2 / (zNear - zFar), 0, 0, 0, 0, 1; projection = MorScal * MorTran * Mpo * projection; return projection; }
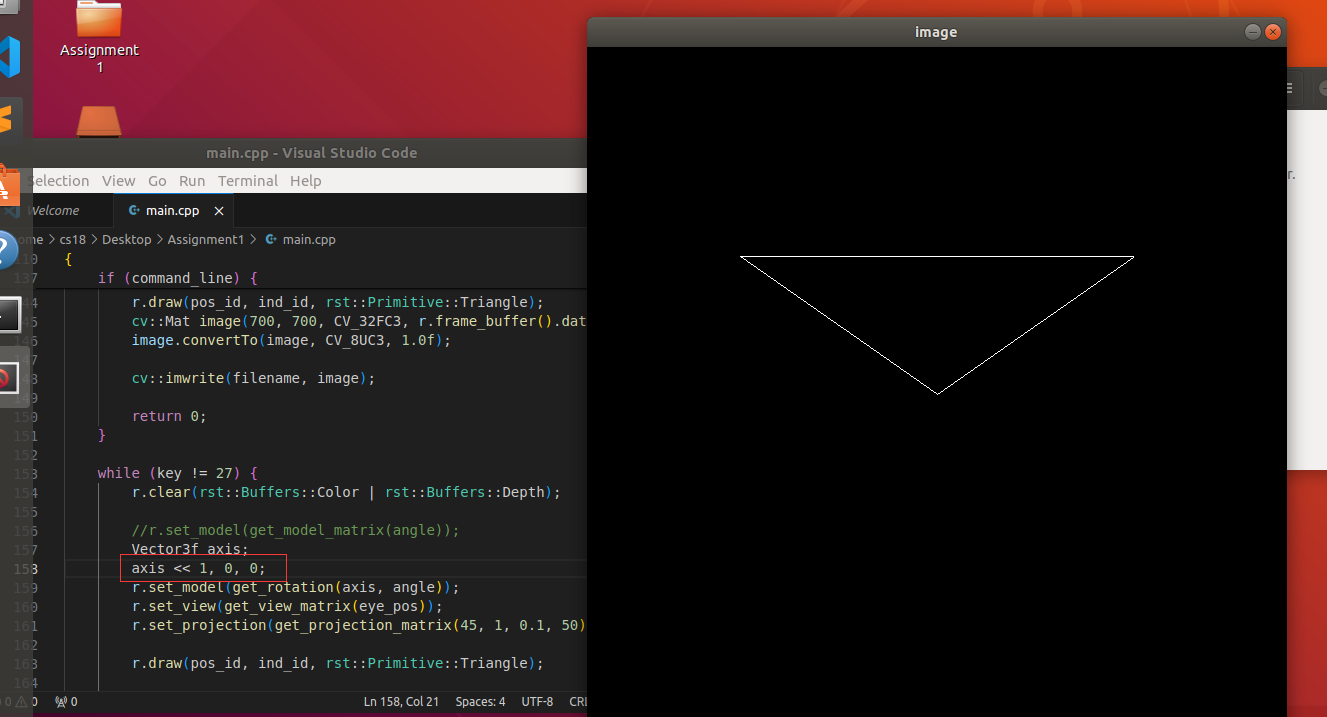
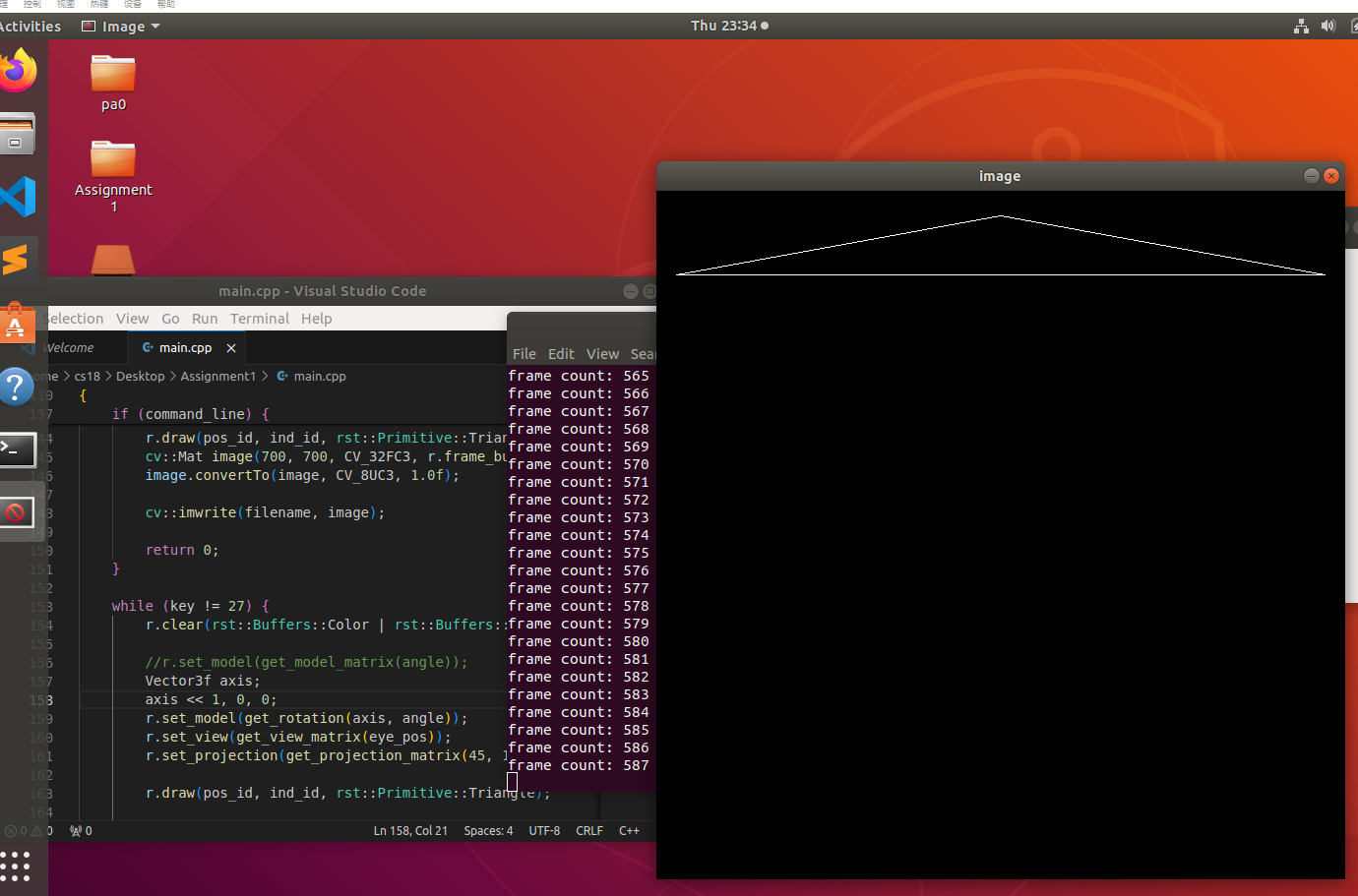
附加作业:在 main.cpp 中构造一个函数,该函数的作用是得到绕任意 过原点的轴的旋转变换矩阵。 Eigen::Matrix4f get_rotation(Vector3f axis, float angle) 。直接使用罗德里格斯公式返回一个旋转矩阵。
Eigen::Matrix4f get_rotation(Vector3f axis, float angle){ //R1 = cosa * I Eigen::Matrix3f I = Eigen::Matrix3f::Identity(); Eigen::Matrix3f R1 = cosf(angle) * I; //R2 = (1 - cosa) * n*nT 即 (1 - cosa)* (a[0], a[1], a[2])T * (a[0], a[1], a[2]) Eigen::Matrix3f R2; R2 << axis[0] * axis[0], axis[0] * axis[1], axis[0] * axis[2], axis[1] * axis[0], axis[1] * axis[1], axis[1] * axis[2], axis[2] * axis[0], axis[2] * axis[1], axis[2] * axis[2]; R2 = (1 - cosf(angle)) * R2; //R3 = sina * (0, -nz, ny)(nz, 0, -nx)(-ny, nx, 0) Eigen::Matrix3f R3; R3 << 0, -axis[2], axis[1], axis[2], 0, -axis[0], -axis[1], axis[0], 0; R3 = sinf(angle) * R3; Eigen::Matrix3f R = R1 + R2 + R3; Eigen::Matrix4f Res; Res << R(0,0), R(0,1), R(0,2), 0, R(1,0), R(1,1), R(1,2), 0, R(2,0), R(2,1), R(2,2), 0, 0, 0, 0, 1; return Res; }
这里贴出绕x轴旋转效果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号