

(转)旋转矩阵推导
转自:http://www.cnblogs.com/luweimy/p/4121789.html
预备知识
矩阵乘法
介绍略,去网上查吧
两角和(差)公式
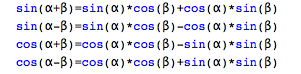
推导
旋转变换一般是按照某个圆心点,以一定半径 r 旋转一定的角度α,为了简单起见我们给出下面的情景
假定点A(x,y)想经过旋转变换到达B(x',y'),已知旋转角度α和点A坐标,计算出点B
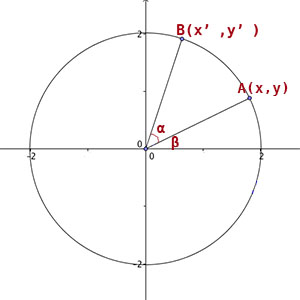
要计算点B则分别计算他的x'和y'分量
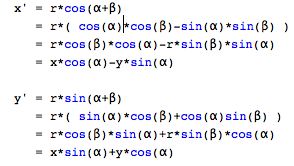
得出结果:

根据矩阵乘法计算规则,可以推出
左侧矩阵第一行各个元素分别乘以右侧矩阵第一列,然后相加,是结果矩阵的第一行第一列的元素
左侧矩阵第二行各个元素分别乘以右侧矩阵第一列,然后相加,是结果矩阵的第二行第一列的元素

只要给出旋转角度,就能计算出矩阵,然后就可以用这个矩阵分别左乘每一个点,就能计算出这个点旋转后的点坐标 这样我们就可以通过矩阵变换坐标了
如果是三维的话还得加个Z轴,多一个分量,矩阵也变成了3x3的,但是大概原理差不多,这里只做简单地原理分析,如果想计算三维点的坐标变换自己手动吧!!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 字符编码:从基础到乱码解决