无线传感网2-传感器布局方法
内容为作者在观看无线感应网络视频时所作的一些笔记,供大家参考。
视频链接为:http://www.iothome.com/resources/publicclass/2016/0513/4258.html
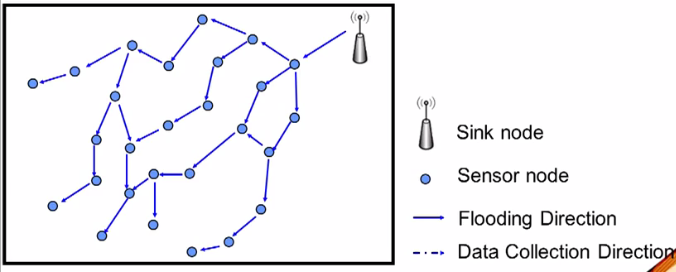
无线感应网络包括:Sensor node和Sink node
运行机制可分为周期性和事件导向性。
周期性:即每过一段时间,把检测的信息上传到CPU。
事件导向性:设定触发事件值,当触发时,把信息上传到CPU。
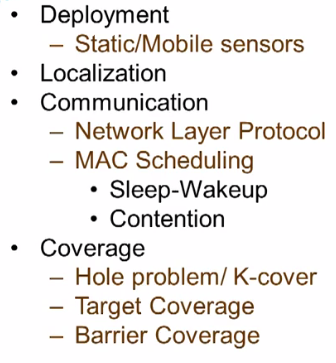
研究的方向问题:
用机器人布局传感器节点方式:

可以看到,有大片区域没有布上传感器,这片区域称为空洞。
机器人从左上角开始,先往下走,下方走不通,再走右方,右方走不通,再走上方,上方也走不通再走左方,可看到大部分是布上传感器,障碍物里面没有布上传感器,还是存在空洞。
能够克服障碍物的布局传感器方法:
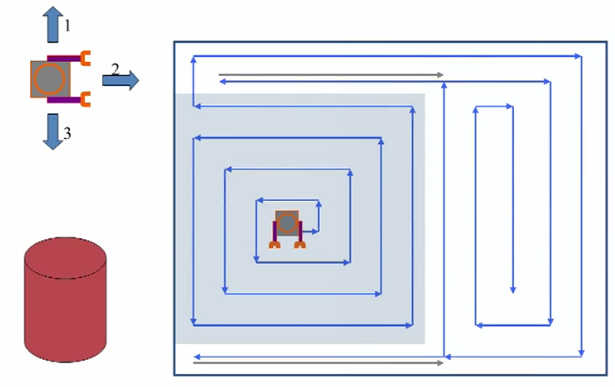
第一个:

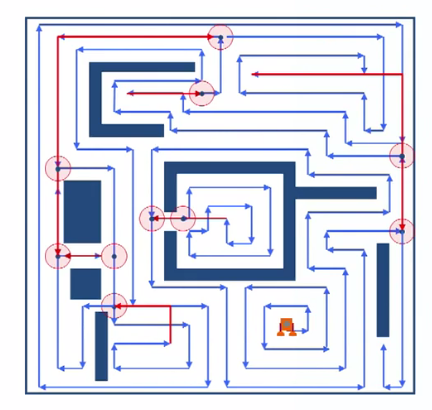
使用螺旋形进行节点布局
没有空洞,但是也是存在缺点的
如果布局是矩形,则有大量空洞,另外会重复走一些区域,浪费时间和能量。
第2个:

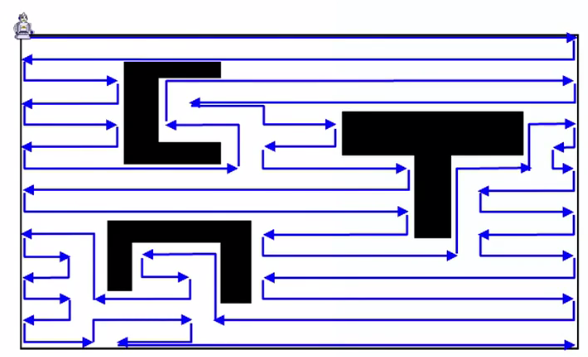
缺点:只针对特定障碍物和死结问题
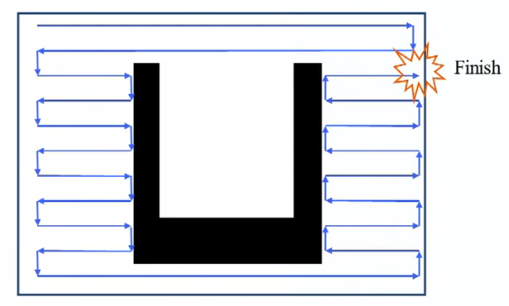
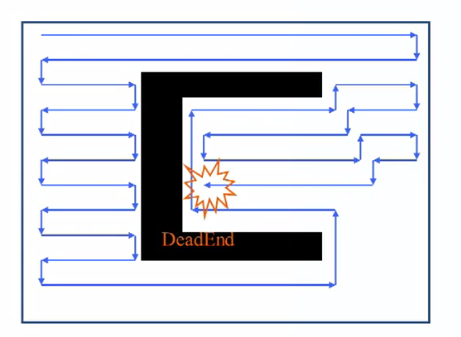
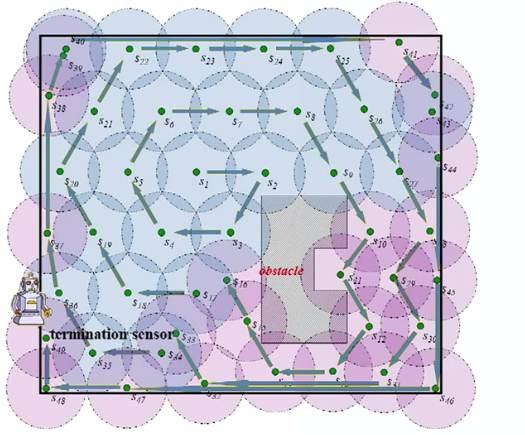
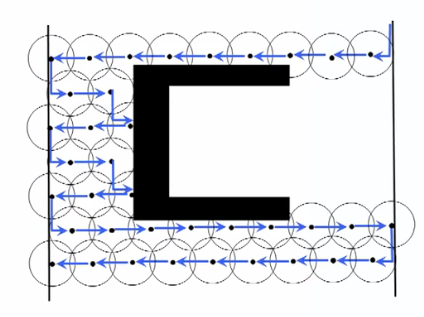
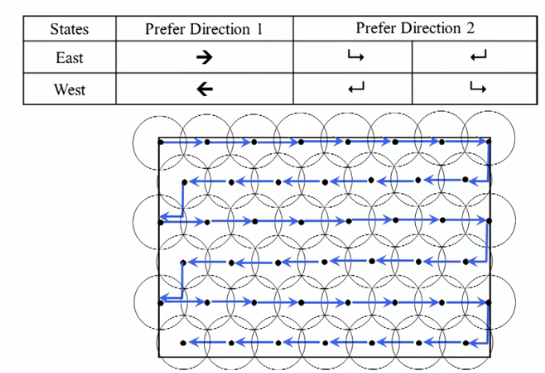
第三种:克服死结问题

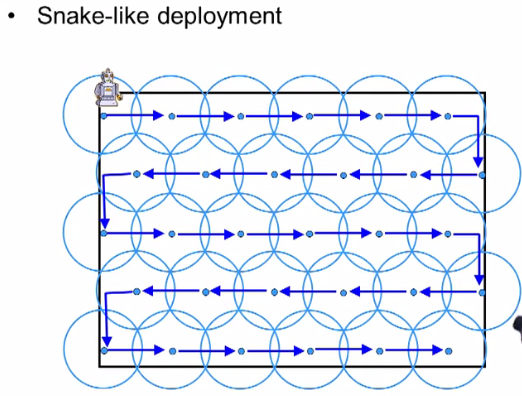
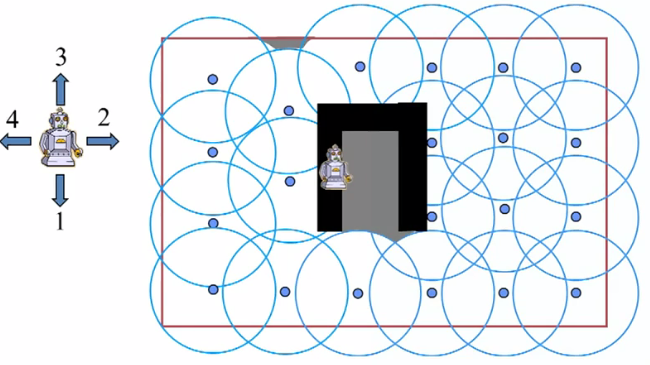
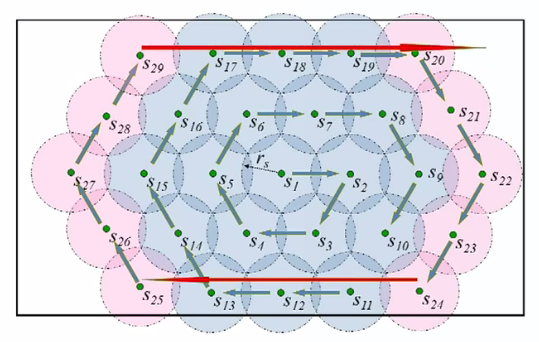
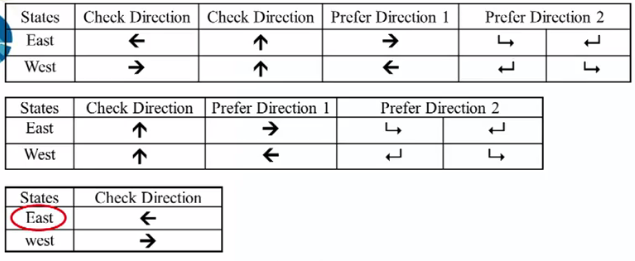
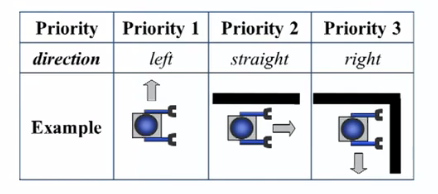
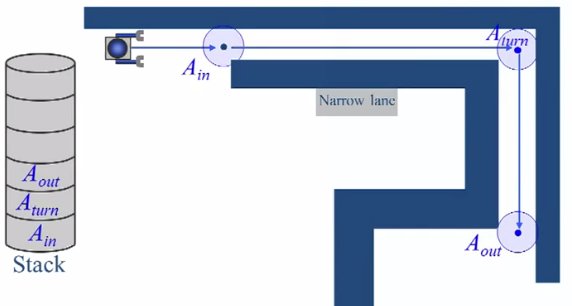
机器人放置节点规则:

机器人行走规则:
由于左手边是边界,只好直走
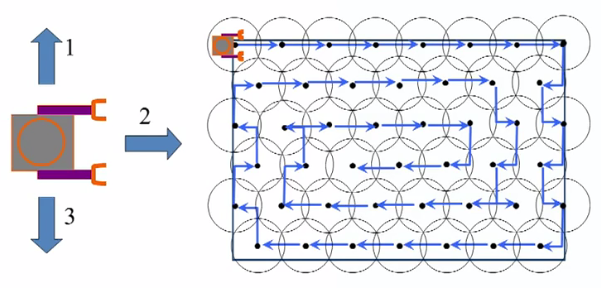
走到头,发现前方边界,左手边边界,往右转弯,
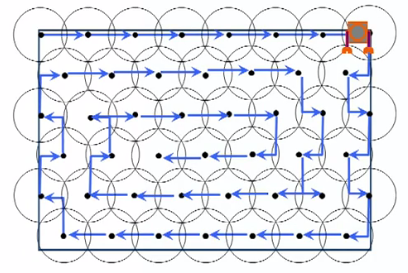
发现左手边是边界,往下直走,
走到头,发现左手边边界,前方边界,往右转弯
发现左手边是边界,往前直走,
走到头,发现左手边边界,前方边界,往右转弯
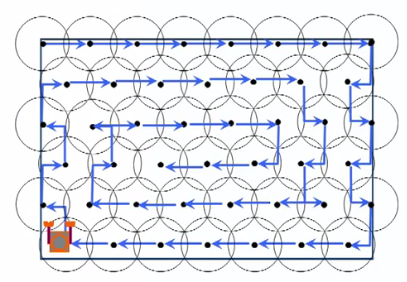
一直往前走
以此类推,走完全部区域
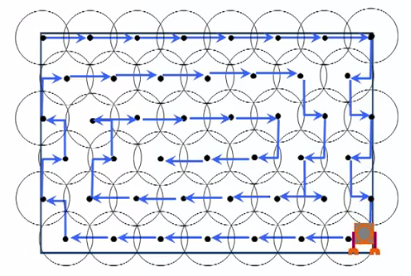
当把机器人开始放在中间位置,一样可以步完整个区域

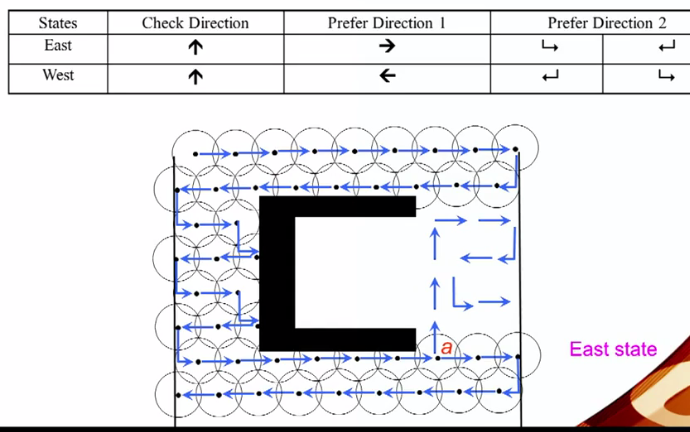
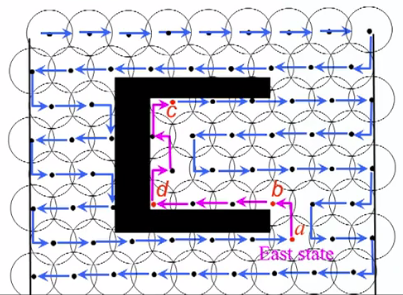
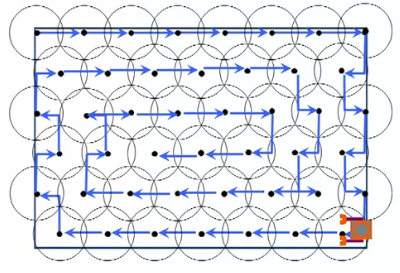
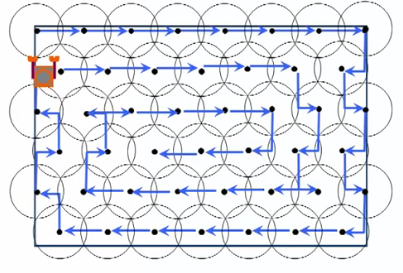
但是有障碍物时,不能布完整个区域
采取的如下办法


记录开始的位置和改变方向的位置和离开时的位置

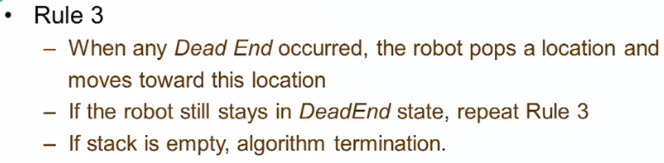
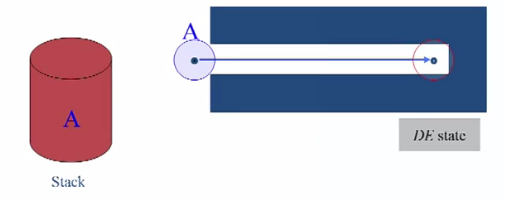

如图,机器人按照路线行走,并记录位置,走到最后进入死结,然后走到最后记录位置
一直走到A点,走出死结区
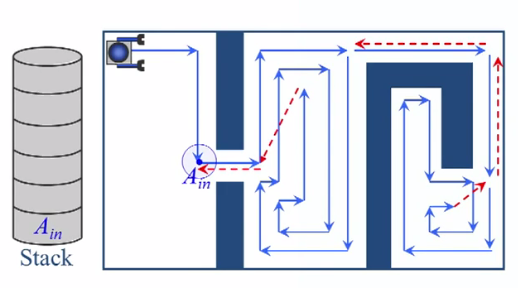
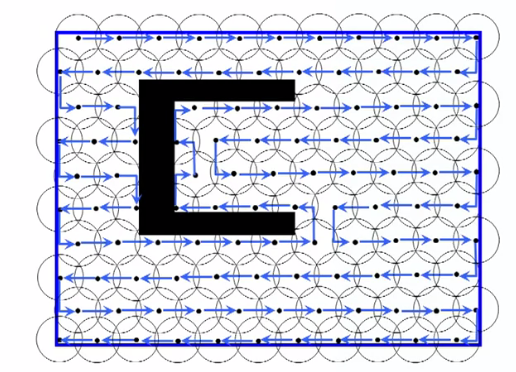
然后完成整个区域布节点
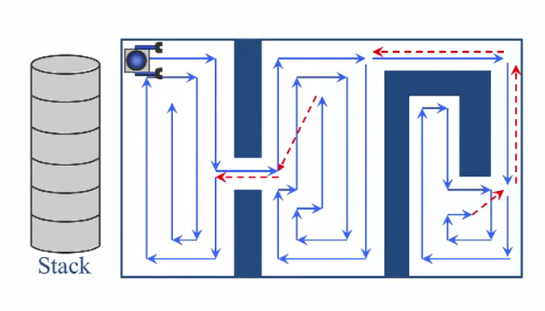
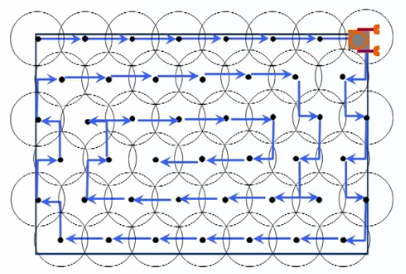
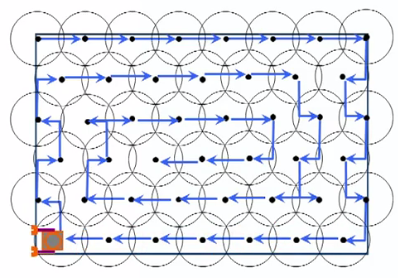
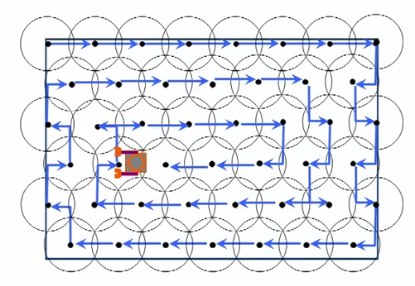
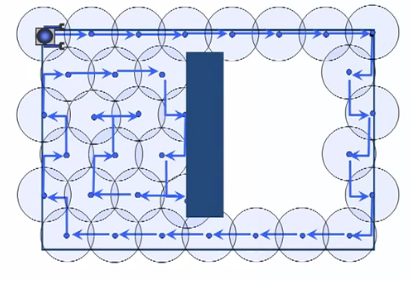
把机器人放中间,从中间开始,一样可以布完节点
有复杂障碍物也能克服,也能克服死结