


Zynq7000开发系列-7(在Zybo上运行Linaro桌面系统)
目标板:Zybo(7Z010)
主机操作系统:Ubuntu 14.04.5 LTS 64bit
交叉编译链: arm-xilinx-linux-gnueabi- [gcc version 4.9.2 (Sourcery CodeBench Lite 2015.05-17)]
Linaro系统:linaro-precise-ubuntu-desktop-20120923-436.tar.gz
〇、准备工作
1、交叉编译环境搭建,见之前的记录:Zynq7000开发系列-4(新:Xilinx交叉编译环境搭建)
2、环境变量设置
gedit /etc/bash.bashrc 在文件底部添加: export ARCH=arm export CROSS_COMPILE=arm-xilinx-linux-gnueabi-gcc
重启终端后生效。(后续编译命令中即可省略对ARCH、CROSS_COMPILE的指定)
一、硬件平台搭建
[目标文件:硬件平台综合生成的比特流文件system_warpper.bit、SDK创建的FSBL执行文件fsbl.elf、SDK/ubuntu创建的设备树文件system.dts/devicetree.dtb]
1、硬件平台综合生成的比特流文件system_warpper.bit
1)安装Vivado 2015.4,参考:Zynq7000开发系列-1(Vivado HLx 2016.4下载及安装)
2)安装zybo板级文件,参考:Installing Vivado Board Files for Digilent Boards
3)创建硬件工程,如下各图(见注释):
#1 创建名为my_linux_bd的硬件工程
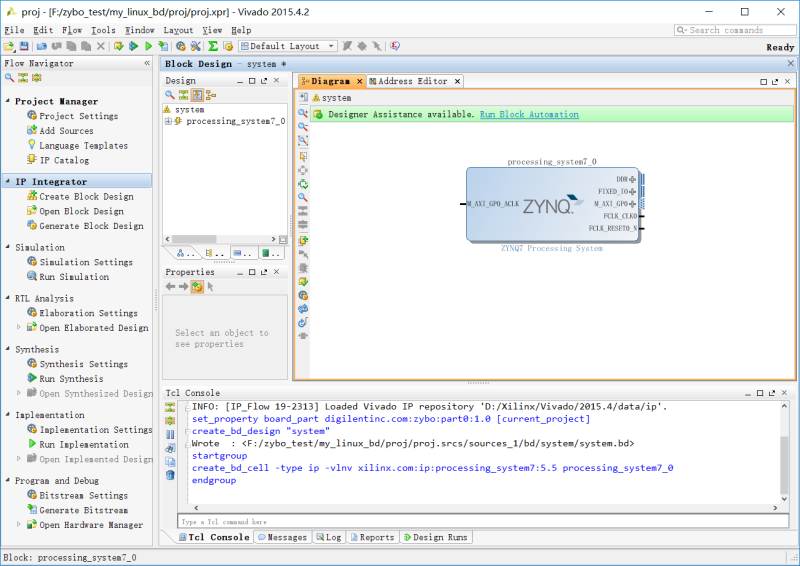
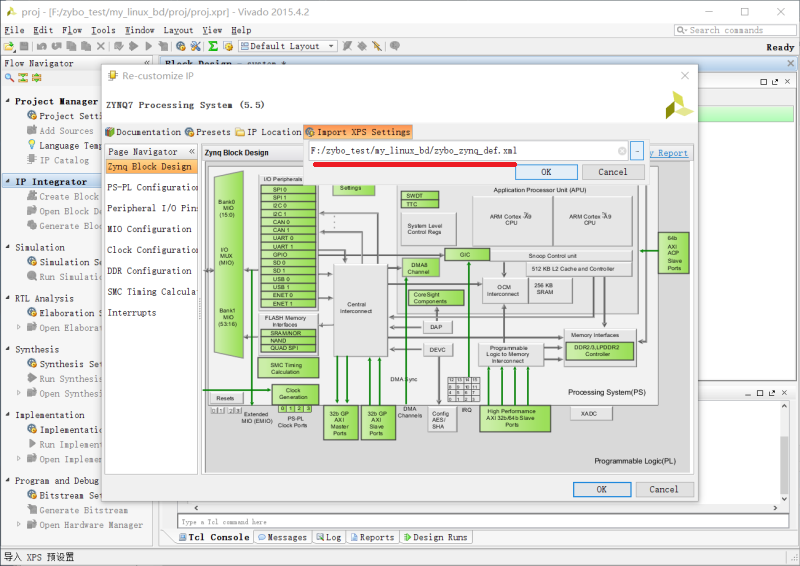
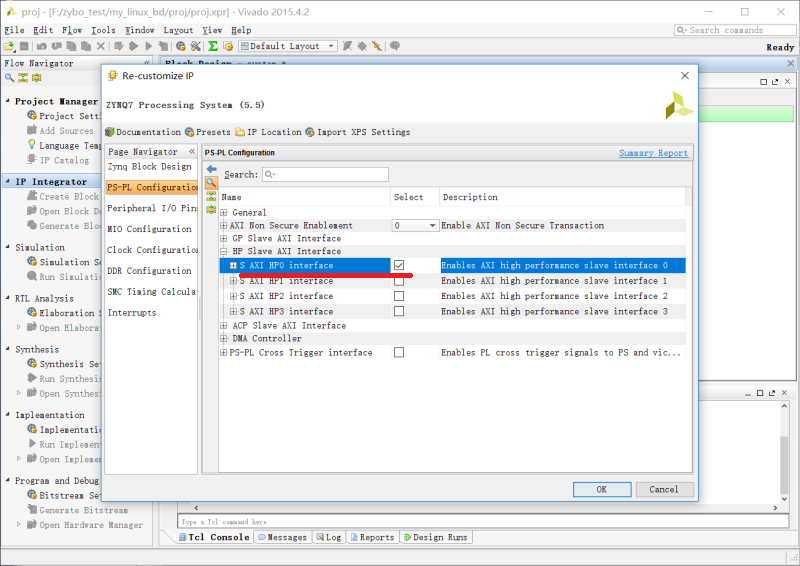
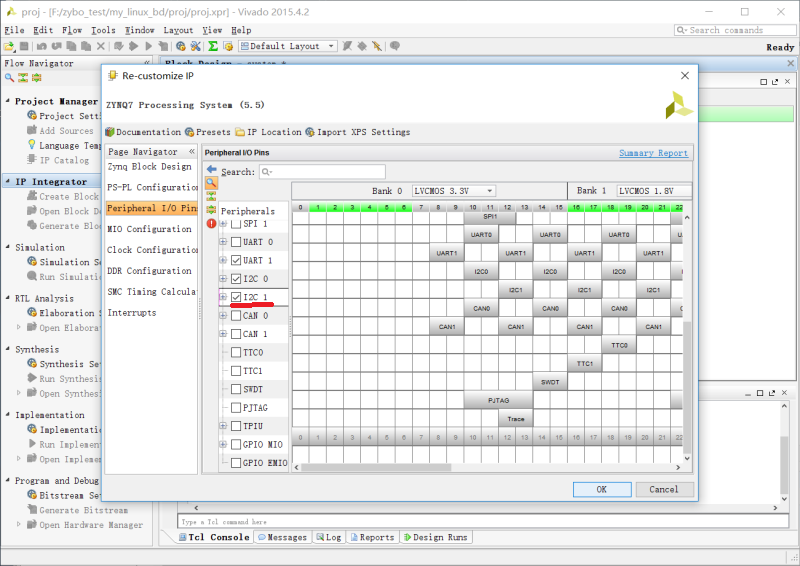
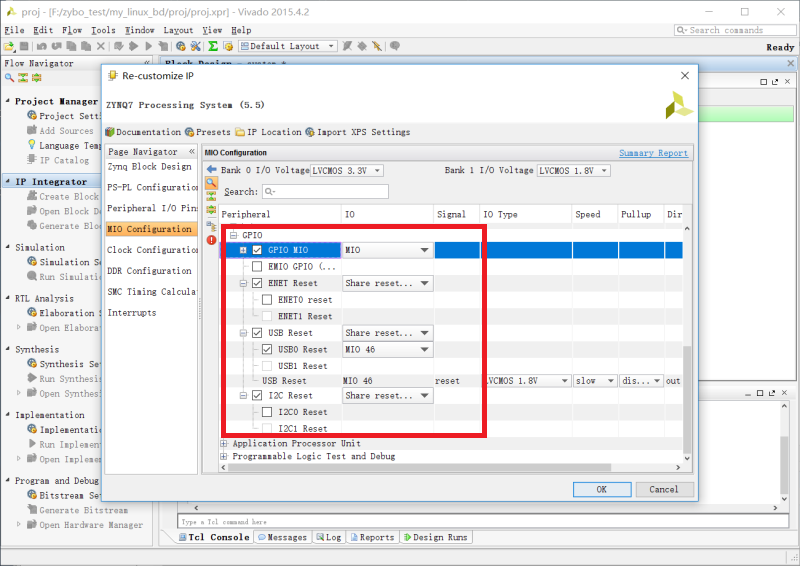
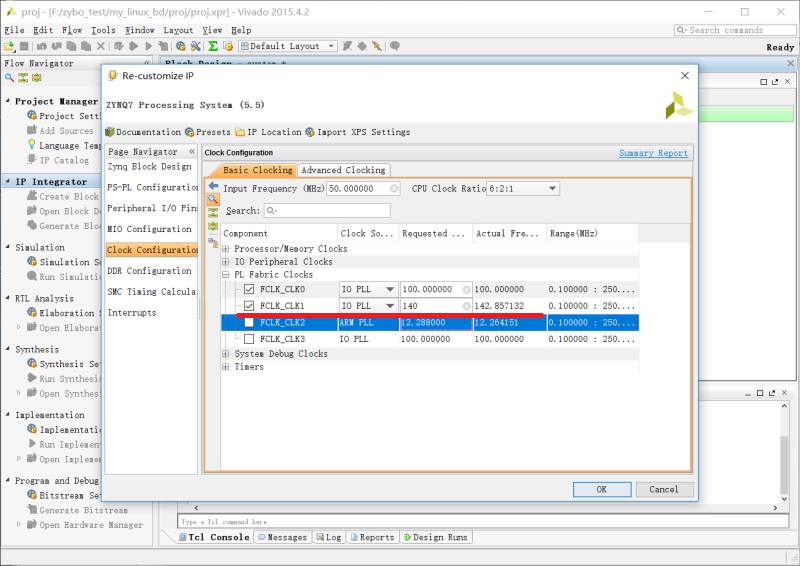
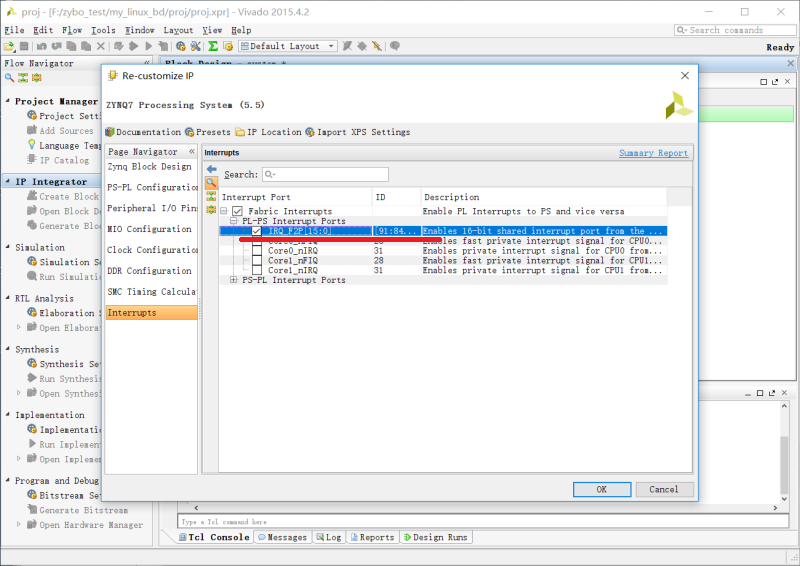
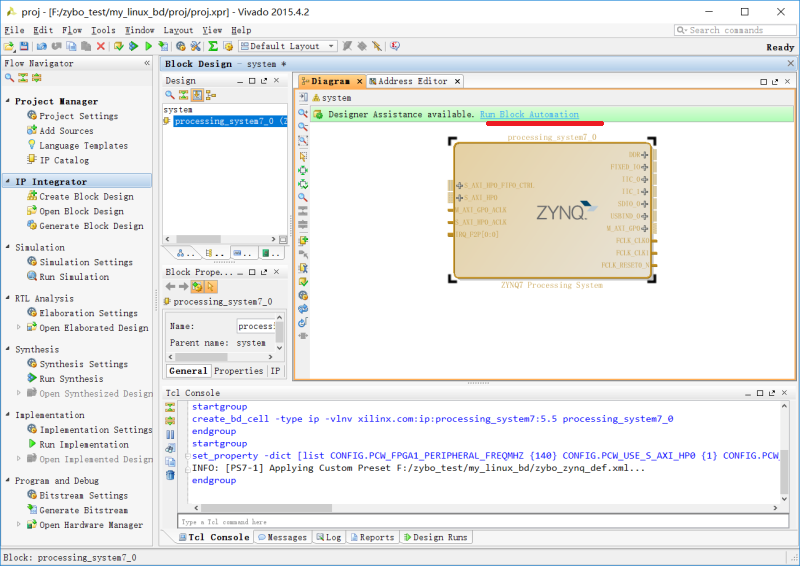
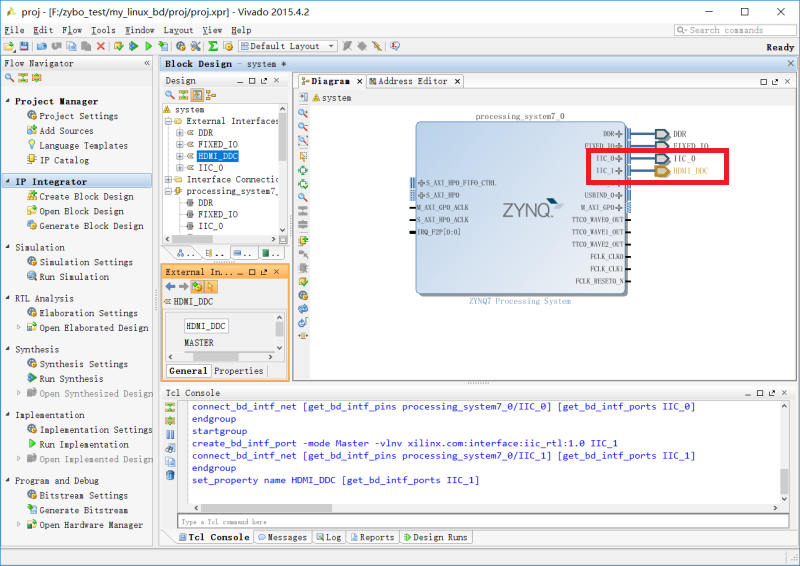
#2 创建名为system的block design顶层文件,添加zynq系统IP,导入zybo板级配置文件,并做必要修改
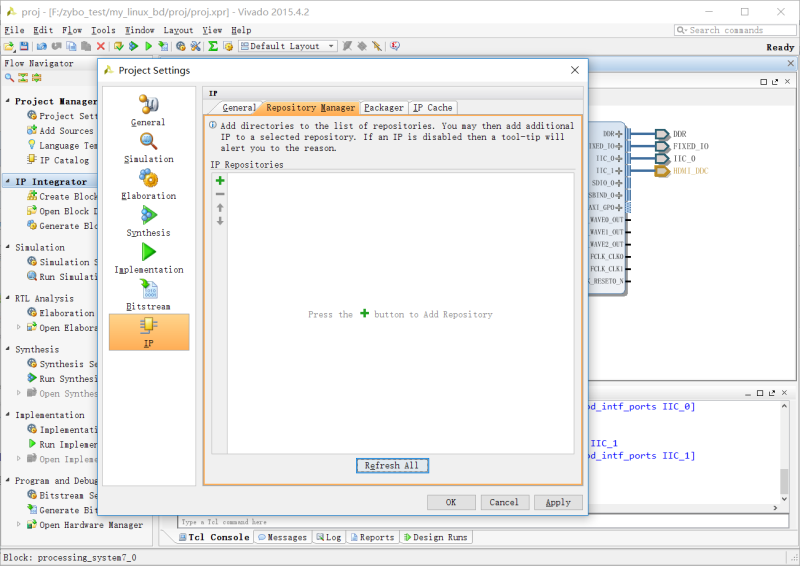
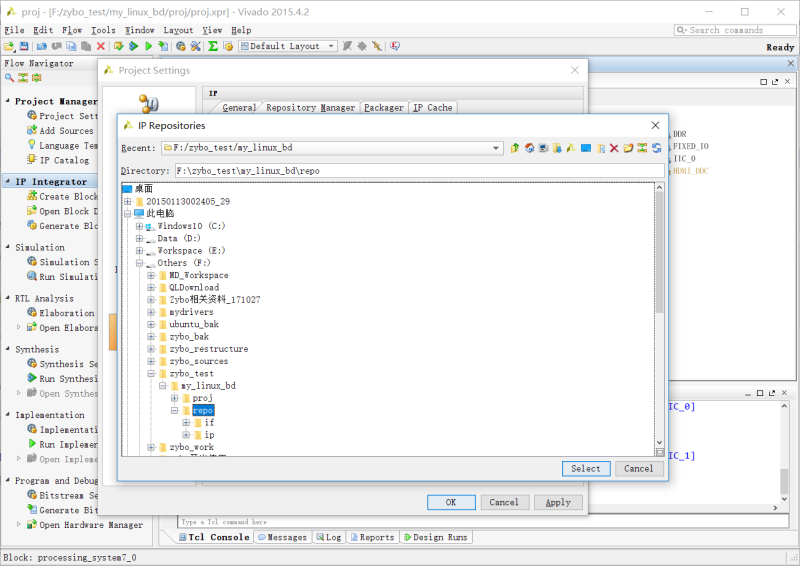
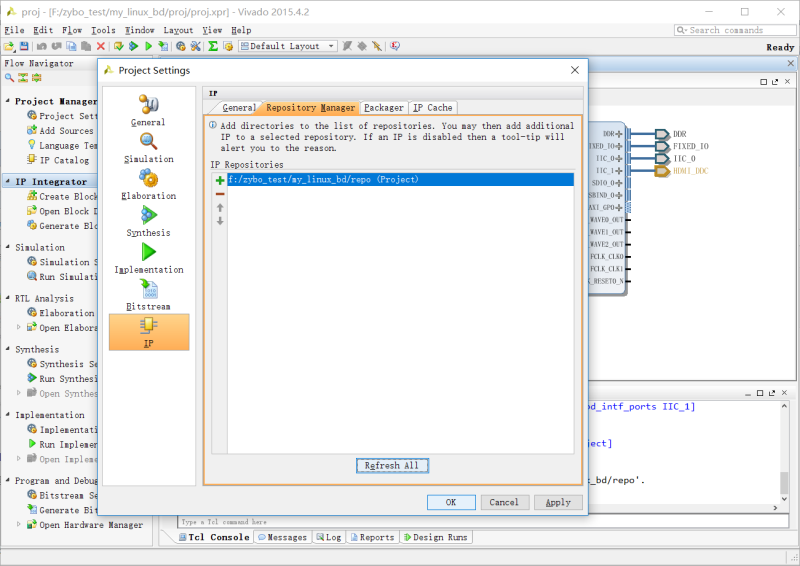
#3 添加必要的vivado-library(开源IP核[ axi_dynclk_v1_0、rgb2dvi ]及接口[ tmds_v1_0 ])
(在工程文件夹内创建名为repo的文件夹,repo文件夹内创建if、ip文件夹,拷贝接口文件tmds_v1_0到if文件夹内,拷贝IP核axi_dynclk_v1_0、rgb2dvi到ip文件夹内,并按下图操作)
(开源vivado-library下载:https://github.com/Digilent/vivado-library)
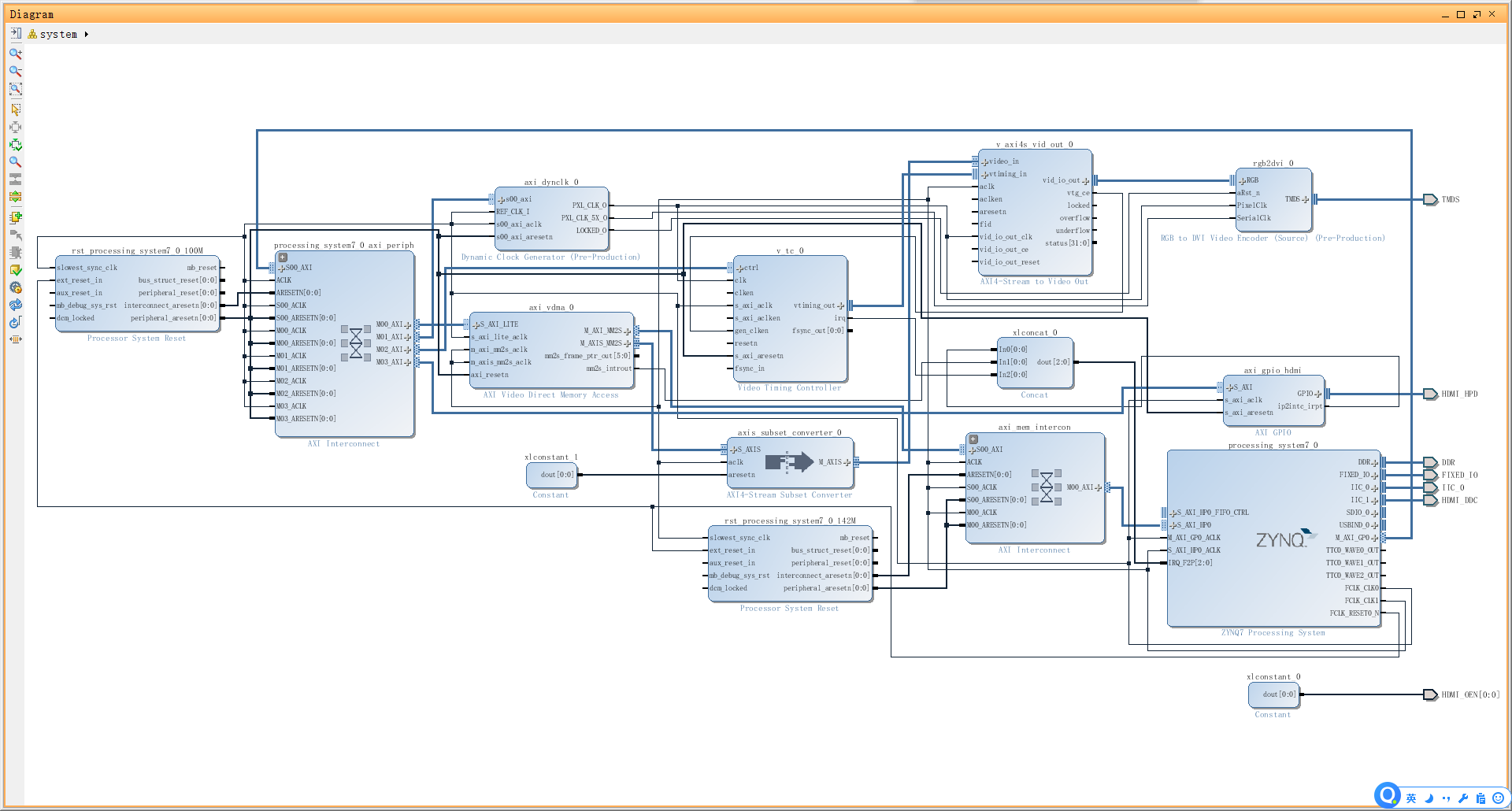
#4 添加IP核:axi_dynclk_v1_0、rgb2dvi、gpio、vdma、vtc、stream2video等IP核,并作布线如下图所示
(布线方法:先手动连接时钟信号线FCLK_CLK0、FCLK_CLK1,然后点击上方的绿色自动布线选项)
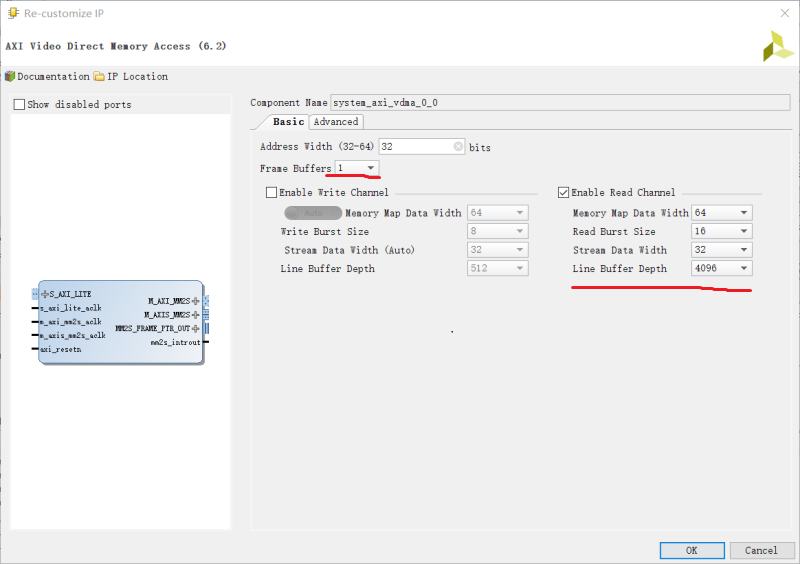
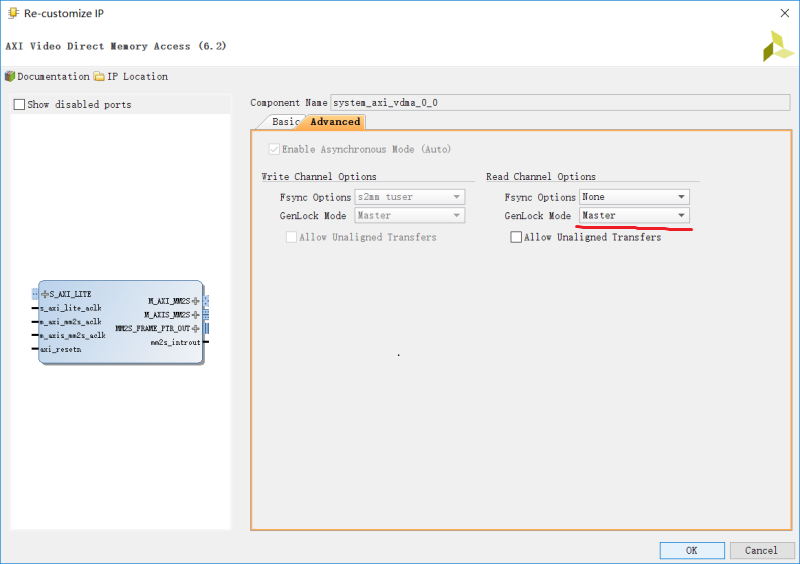
其中,关键IP核配置如下:
##1 vdma
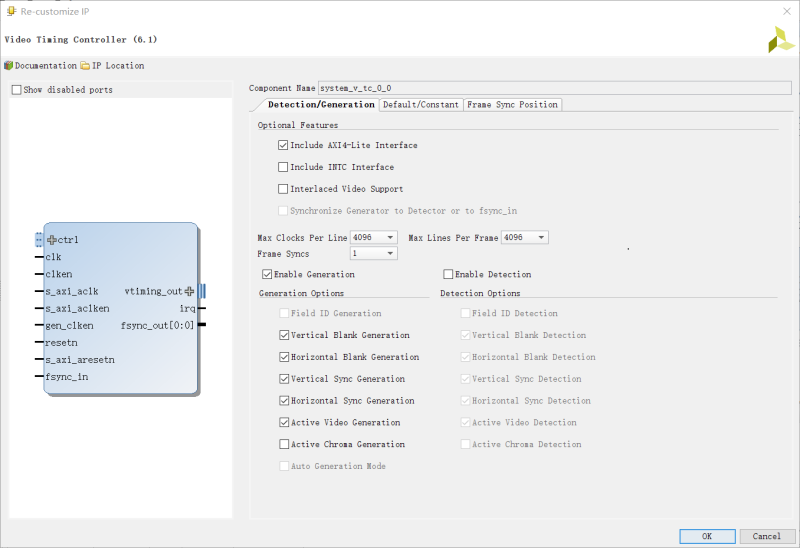
##2 vtc
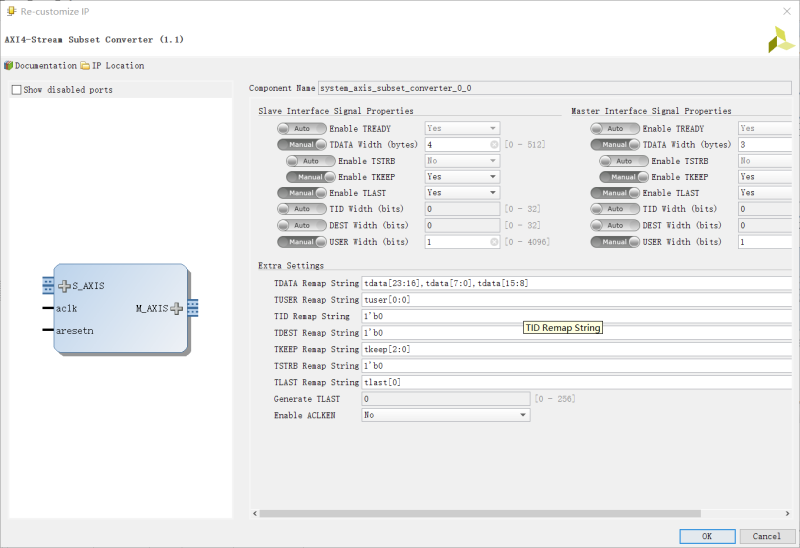
##3 axis_subset_converter
##4 stream2video
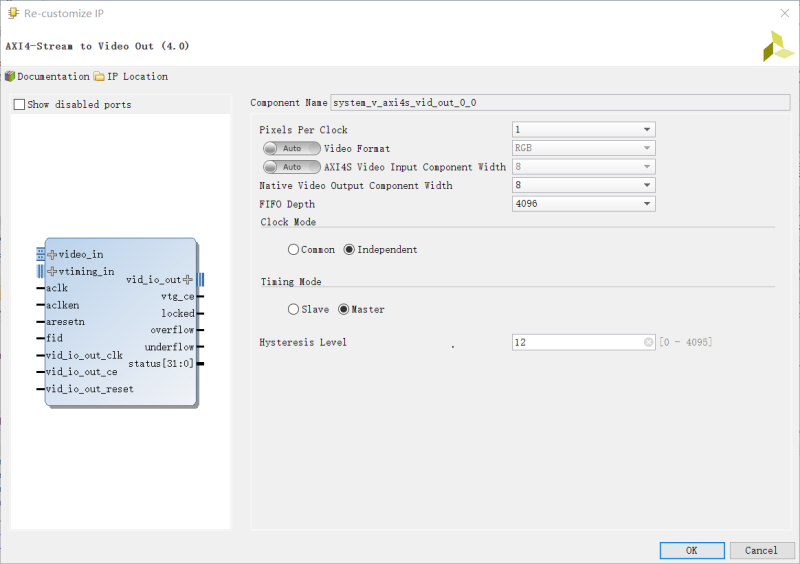
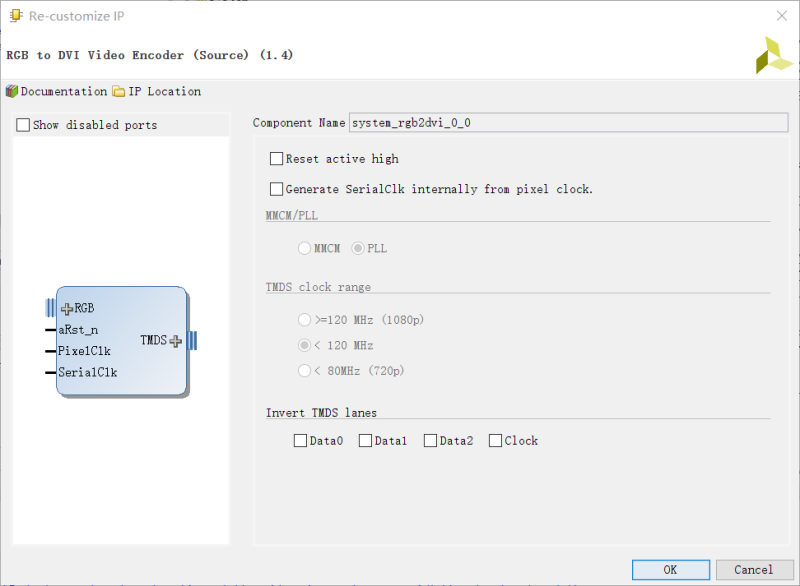
##5 rgb2dvi
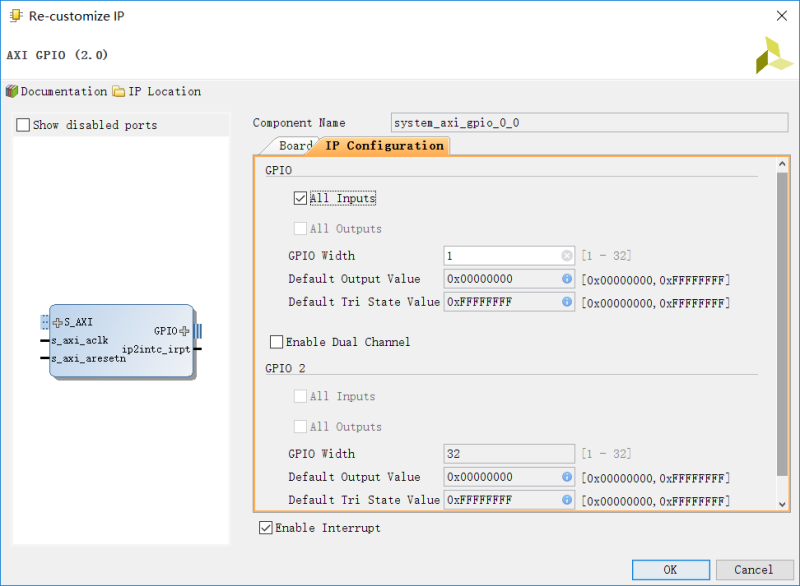
##6 gpio
##7 图中两个常量IP均为一位,数值为1,其一使converter不重置,其二使HDMI_OEN输出为高电平,指示当前hdmi为输出模式
#5 点击“validate design”,验证没有错误后,添加引脚约束文件,修改自ZYBO_Master.xdc
## This file is a general .xdc for the ZYBO Rev B board ## To use it in a project: ## - uncomment the lines corresponding to used pins ## - rename the used signals according to the project ##Audio Codec/external EEPROM IIC bus #IO_L13P_T2_MRCC_34 set_property PACKAGE_PIN N18 [get_ports iic_0_scl_io] set_property IOSTANDARD LVCMOS33 [get_ports iic_0_scl_io] #IO_L23P_T3_34 set_property PACKAGE_PIN N17 [get_ports iic_0_sda_io] set_property IOSTANDARD LVCMOS33 [get_ports iic_0_sda_io] ##HDMI Signals #IO_L13N_T2_MRCC_35 set_property IOSTANDARD TMDS_33 [get_ports TMDS_clk_n] #IO_L13P_T2_MRCC_35 set_property PACKAGE_PIN H16 [get_ports TMDS_clk_p] set_property IOSTANDARD TMDS_33 [get_ports TMDS_clk_p] #IO_L4N_T0_35 set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_n[0]}] #IO_L4P_T0_35 set_property PACKAGE_PIN D19 [get_ports {TMDS_data_p[0]}] set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_p[0]}] #IO_L1N_T0_AD0N_35 set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_n[1]}] #IO_L1P_T0_AD0P_35 set_property PACKAGE_PIN C20 [get_ports {TMDS_data_p[1]}] set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_p[1]}] #IO_L2N_T0_AD8N_35 set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_n[2]}] #IO_L2P_T0_AD8P_35 set_property PACKAGE_PIN B19 [get_ports {TMDS_data_p[2]}] set_property IOSTANDARD TMDS_33 [get_ports {TMDS_data_p[2]}] #IO_L5P_T0_AD9P_35 set_property PACKAGE_PIN E18 [get_ports {hdmi_hpd_tri_i[0]}] set_property IOSTANDARD LVCMOS33 [get_ports {hdmi_hpd_tri_i[0]}] ##IO_L6N_T0_VREF_35 set_property PACKAGE_PIN F17 [get_ports {HDMI_OEN[0]}] set_property IOSTANDARD LVCMOS33 [get_ports {HDMI_OEN[0]}] #IO_L16P_T2_35 set_property PACKAGE_PIN G17 [get_ports hdmi_ddc_scl_io] set_property IOSTANDARD LVCMOS33 [get_ports hdmi_ddc_scl_io] #IO_L16N_T2_35 set_property PACKAGE_PIN G18 [get_ports hdmi_ddc_sda_io] set_property IOSTANDARD LVCMOS33 [get_ports hdmi_ddc_sda_io]
#6 点击“generate bitstream”,等待生成比特流文件
2、SDK创建的FSBL执行文件fsbl.elf
略。
3、SDK/ubuntu创建的设备树文件system.dts/devicetree.dtb
1)下载device_tree配置文件,链接:https://github.com/Xilinx/device-tree-xlnx/releases(注意下载的版本与vivado版本匹配)
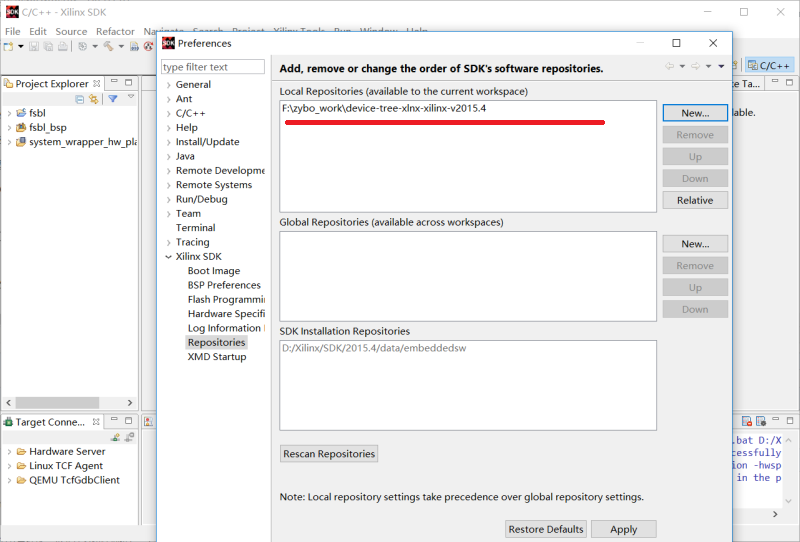
2)SDK添加device_tree配置文件
Xilinx Tools -> Repositories -> New
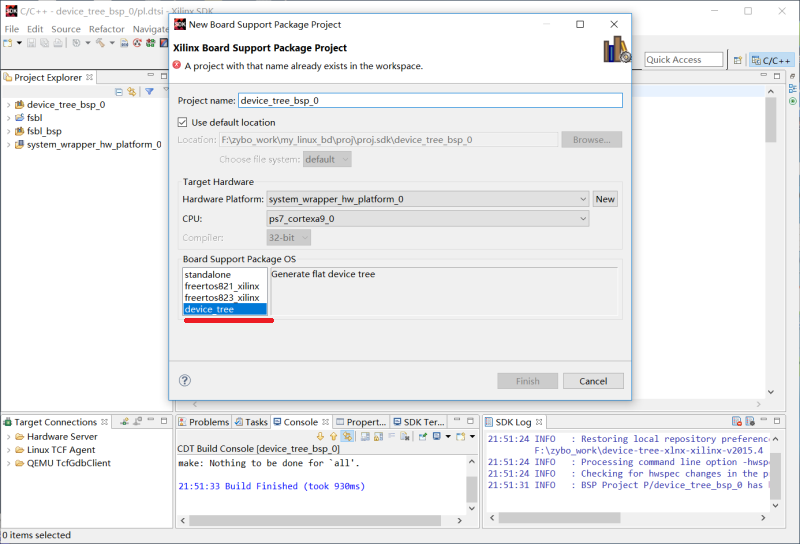
3)SDK创建device_tree工程,生成dts文件
File -> New -> Board Support Package
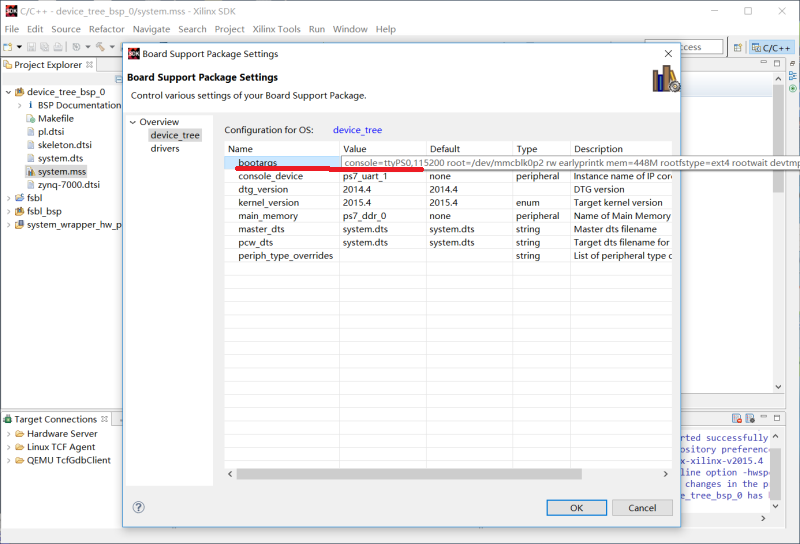
4)bootagrs参数设定
(e.g. console=ttyPS0,115200 root=/dev/mmcblk0p2 rw earlyprintk rootfstype=ext4 rootwait devtmpfs.mount=1)
5)[重要] 根据相关硬件做出修改,如下:
#1 添加usb驱动配置
在pl.dtsi文件中最后一个分号“ } ; ”前添加:
/*add for usb0*/ usb_phy_0: usb_phy { compatible = "usb-nop-xceiv"; #phy-cells = <0x0>; };
并在zynq-7000.dtsi文件中,usb0标签的最后一个分号“ } ; ”前添加:
usb-phy = <&usb_phy_0>;//add for usb0
#2 添加hdmi驱动配置
在pl.dtsi文件中,amba_pl标签内作如下修改:
amba_pl: amba_pl { #address-cells = <1>; #size-cells = <1>; compatible = "simple-bus"; ranges ; axi_dynclk_0: axi_dynclk@43c00000 { #clock-cells = <0x0>;//add compatible = "digilent,axi-dynclk";//change reg = <0x43c00000 0x10000>; xlnx,s00-axi-addr-width = <0x5>; xlnx,s00-axi-data-width = <0x20>; clocks = <&clkc 0xf>;//add, 0xf不能删掉 }; axi_gpio_hdmi: gpio@41200000 { #gpio-cells = <2>; compatible = "xlnx,xps-gpio-1.00.a"; gpio-controller ; interrupt-parent = <&intc>; interrupts = <0 29 4>; reg = <0x41200000 0x10000>; xlnx,all-inputs = <0x1>; xlnx,all-inputs-2 = <0x0>; xlnx,all-outputs = <0x0>; xlnx,all-outputs-2 = <0x0>; xlnx,dout-default = <0x00000000>; xlnx,dout-default-2 = <0x00000000>; xlnx,gpio-width = <0x1>; xlnx,gpio2-width = <0x20>; xlnx,interrupt-present = <0x1>; xlnx,is-dual = <0x0>; xlnx,tri-default = <0xFFFFFFFF>; xlnx,tri-default-2 = <0xFFFFFFFF>; }; axi_vdma_0: dma@43000000 { #dma-cells = <1>; compatible = "xlnx,axi-vdma-1.00.a"; interrupt-parent = <&intc>; interrupts = <0 30 4>; reg = <0x43000000 0x10000>; //xlnx,flush-fsync = <0x1>;//change xlnx,num-fstores = <0x1>; dma-channel@43000000 { compatible = "xlnx,axi-vdma-mm2s-channel"; interrupts = <0 30 4>; clocks = <&clkc>;//add clock-names = "axis";//add xlnx,datawidth = <0x20>; xlnx,device-id = <0x0>; }; }; v_tc_0: v_tc@43c10000 { compatible = "xlnx,v-tc-5.01.a";//change interrupt-parent = <&intc>; interrupts = <0 31 4>; reg = <0x43c10000 0x10000>; xlnx,det-achroma-en = <0x0>; xlnx,det-avideo-en = <0x1>; xlnx,det-fieldid-en = <0x0>; xlnx,det-hblank-en = <0x1>; xlnx,det-hsync-en = <0x1>; xlnx,det-vblank-en = <0x1>; xlnx,det-vsync-en = <0x1>; xlnx,detect-en = <0x0>; xlnx,fsync-hstart0 = <0x0>; xlnx,fsync-hstart1 = <0x0>; xlnx,fsync-hstart10 = <0x0>; xlnx,fsync-hstart11 = <0x0>; xlnx,fsync-hstart12 = <0x0>; xlnx,fsync-hstart13 = <0x0>; xlnx,fsync-hstart14 = <0x0>; xlnx,fsync-hstart15 = <0x0>; xlnx,fsync-hstart2 = <0x0>; xlnx,fsync-hstart3 = <0x0>; xlnx,fsync-hstart4 = <0x0>; xlnx,fsync-hstart5 = <0x0>; xlnx,fsync-hstart6 = <0x0>; xlnx,fsync-hstart7 = <0x0>; xlnx,fsync-hstart8 = <0x0>; xlnx,fsync-hstart9 = <0x0>; xlnx,fsync-vstart0 = <0x0>; xlnx,fsync-vstart1 = <0x0>; xlnx,fsync-vstart10 = <0x0>; xlnx,fsync-vstart11 = <0x0>; xlnx,fsync-vstart12 = <0x0>; xlnx,fsync-vstart13 = <0x0>; xlnx,fsync-vstart14 = <0x0>; xlnx,fsync-vstart15 = <0x0>; xlnx,fsync-vstart2 = <0x0>; xlnx,fsync-vstart3 = <0x0>; xlnx,fsync-vstart4 = <0x0>; xlnx,fsync-vstart5 = <0x0>; xlnx,fsync-vstart6 = <0x0>; xlnx,fsync-vstart7 = <0x0>; xlnx,fsync-vstart8 = <0x0>; xlnx,fsync-vstart9 = <0x0>; xlnx,gen-achroma-en = <0x0>; xlnx,gen-achroma-polarity = <0x1>; xlnx,gen-auto-switch = <0x0>; xlnx,gen-avideo-en = <0x1>; xlnx,gen-avideo-polarity = <0x1>; xlnx,gen-cparity = <0x0>; xlnx,gen-f0-vblank-hend = <0x500>; xlnx,gen-f0-vblank-hstart = <0x500>; xlnx,gen-f0-vframe-size = <0x2ee>; xlnx,gen-f0-vsync-hend = <0x500>; xlnx,gen-f0-vsync-hstart = <0x500>; xlnx,gen-f0-vsync-vend = <0x2d9>; xlnx,gen-f0-vsync-vstart = <0x2d4>; xlnx,gen-f1-vblank-hend = <0x500>; xlnx,gen-f1-vblank-hstart = <0x500>; xlnx,gen-f1-vframe-size = <0x2ee>; xlnx,gen-f1-vsync-hend = <0x500>; xlnx,gen-f1-vsync-hstart = <0x500>; xlnx,gen-f1-vsync-vend = <0x2d9>; xlnx,gen-f1-vsync-vstart = <0x2d4>; xlnx,gen-fieldid-en = <0x0>; xlnx,gen-fieldid-polarity = <0x1>; xlnx,gen-hactive-size = <0x500>; xlnx,gen-hblank-en = <0x1>; xlnx,gen-hblank-polarity = <0x1>; xlnx,gen-hframe-size = <0x672>; xlnx,gen-hsync-en = <0x1>; xlnx,gen-hsync-end = <0x596>; xlnx,gen-hsync-polarity = <0x1>; xlnx,gen-hsync-start = <0x56e>; xlnx,gen-interlaced = <0x0>; xlnx,gen-vactive-size = <0x2d0>; xlnx,gen-vblank-en = <0x1>; xlnx,gen-vblank-polarity = <0x1>; xlnx,gen-video-format = <0x2>; xlnx,gen-vsync-en = <0x1>; xlnx,gen-vsync-polarity = <0x1>; xlnx,generate-en = <0x1>; xlnx,has-axi4-lite = <0x1>; xlnx,has-intc-if = <0x0>; xlnx,interlace-en = <0x0>; xlnx,max-lines = <0x1000>; xlnx,max-pixels = <0x1000>; xlnx,num-fsyncs = <0x1>; xlnx,sync-en = <0x0>; }; /*add for vga_hdmi_encoder*/ digilent_encoder_0: digilent_encoder { compatible = "dglnt,drm-encoder"; dglnt,edid-i2c = <&i2c1>; }; /*add for drm*/ xilinx_drm_0: xilinx_drm { compatible = "xlnx,drm"; xlnx,vtc = <&v_tc_0>; xlnx,connector-type = "HDMIA"; xlnx,encoder-slave = <&digilent_encoder_0>; clocks = <&axi_dynclk_0>; dglnt,edid-i2c = <&i2c1>; planes { xlnx,pixel-format = "xrgb8888"; plane0 { dmas = <&axi_vdma_0 0>;//0不能删掉 dma-names = "dma"; }; }; }; };
6)修改后,工程会重新编译,复制device_tree_dsp_0整个文件夹到ubuntu系统下,执行以下命令生成设备树文件devicetree.dtb
cd device_tree_dsp_0
dtc -I dts -O dtb ./system.dts -o devicetree.dtb
(前提:安装dtc工具,或从Linux kernel源码中拷贝dtc执行文件出来)
(安装命令:sudo apt-get install device-tree-compile)
二、软件平台搭建
[目标文件:启动引导程序u-boot.elf、Linux内核文件uImage、文件系统linaro]
[待续...]
官方教程链接:
ZYBOt Guide [Reference.Digilentinc]
https://reference.digilentinc.com/learn/programmable-logic/tutorials/zybo-zybot-guide/start
Zybot - Getting Started Guide and Source Code: 8 Steps
http://www.instructables.com/id/Zybot-Getting-Started-Guide/
搭建好了硬件平台、Linaro软件桌面系统,下一步便是开发应用程序(用到Qt与OpenCV),然后交叉编译后移植到Linaro系统中运行。但此时又发生了一个重大问题:交叉编译后的应用程序不能运行,涉及到Linaro系统编译时所用的编译器版本问题、2012年后Linaro系统加载程序的路径及名称问题,以至于需要重装交叉编译链、重新交叉编译Qt与OpenCV等,下一篇文章再续。

