
近似最近邻算法-annoy解析
转自https://www.cnblogs.com/futurehau/p/6524396.html
Annoy是高维空间求近似最近邻的一个开源库。
Annoy构建一棵二叉树,查询时间为O(logn)。
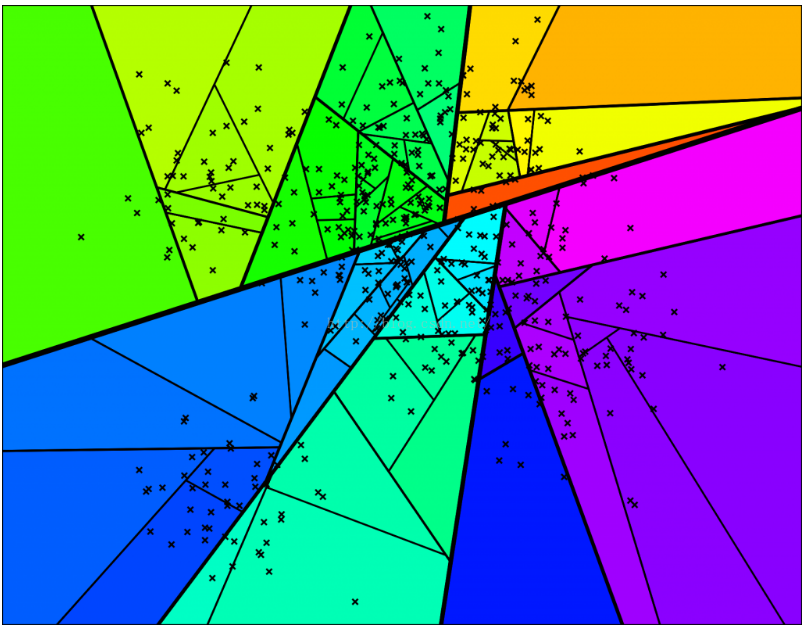
Annoy通过随机挑选两个点,并使用垂直于这个点的等距离超平面将集合划分为两部分。
如图所示,图中灰色线是连接两个点,超平面是加粗的黑线。按照这个方法在每个子集上迭代进行划分。

依此类推,直到每个集合最多剩余k个点,下图是一个k = 10 的情况。
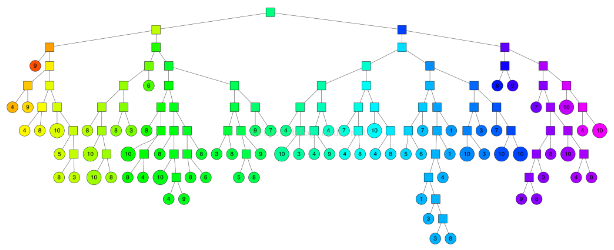
相应的完整二叉树结构:
随机投影森林。
一个思想依据是:在原空间中相邻的点,在树结构上也表现出相互靠近的特点,也就是说,如果两个点在空间上相互靠近,那么他们很可能被树结构划分到一起。
如果要在空间中查找临近点,我们可以在这个二叉树中搜索。上图中每个节点用超平面来定义,所以我们可以计算出该节点往哪个方向遍历,搜索时间 log n
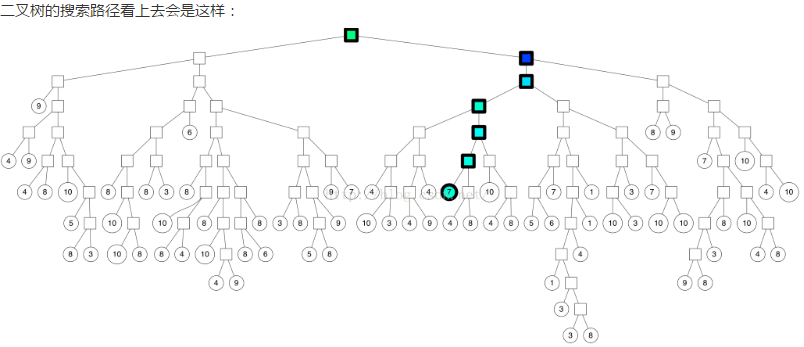
如上图,我们找到了七个最近邻,但是假如我们想找到更多的最近邻怎么办?有些最近邻是在我们遍历的叶子节点的外边的。
技巧1:使用优先队列
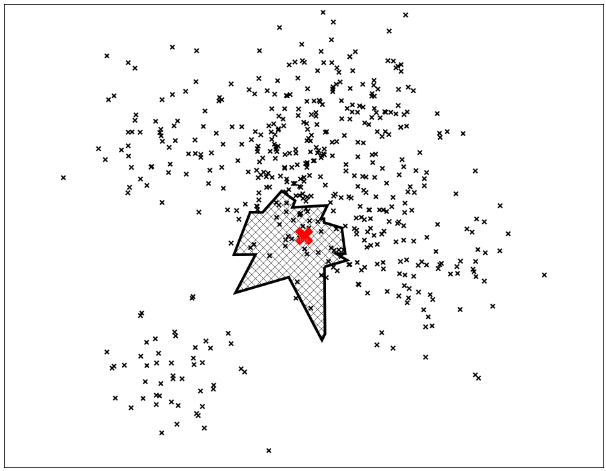
如果一个划分的两边“靠得足够近”(量化方式在后面介绍),我们就两边都遍历。这样就不只是遍历一个节点的一边,我们将遍历更多的点
我们可以设置一个阈值,用来表示是否愿意搜索划分“错”的一遍。如果设置为0,我们将总是遍历“对”的一片。但是如果设置成0.5,就按照上面的搜索路径。
这个技巧实际上是利用优先级队列,依据两边的最大距离。好处是我们能够设置比0大的阈值,逐渐增加搜索范围。
技巧2:构建一个森林
我们能够用一个优先级队列,同时搜索所有的树。这样有另外一个好处,搜索会聚焦到那些与已知点靠得最近的那些树——能够把距离最远的空间划分出去
每棵树都包含所有的点,所以当我们搜索多棵树的时候,将找到多棵树上的多个点。如果我们把所有的搜索结果的叶子节点都合在一起,那么得到的最近邻就非常符合要求。
依照上述方法,我们找到一个近邻的集合,接下来就是计算所有的距离和对这些点进行排序,找到最近的k个点。
很明显,我们会丢掉一些最近的点,这也是为什么叫近似最近邻的原因。
Annoy在实际使用的时候,提供了一种机制可以调整(搜索k),你能够根据它来权衡性能(时间)和准确度(质量)。
tips:
1.距离计算,采用归一化的欧氏距离:vectors = sqrt(2-2*cos(u, v))
2.向量维度较小(<100),即使维度到达1000变现也不错
3.内存占用小
4.索引创建与查找分离(特别是一旦树已经创建,就不能添加更多项)
5.有两个参数可以用来调节Annoy 树的数量n_trees和搜索期间检查的节点数量search_k
n_trees在构建时提供,并影响构建时间和索引大小。 较大的值将给出更准确的结果,但更大的索引。
search_k在运行时提供,并影响搜索性能。 较大的值将给出更准确的结果,但将需要更长的时间返回。
如果不提供search_k,它将默认为n * n_trees,其中n是近似最近邻的数目。 否则,search_k和n_tree大致是独立的,即如果search_k保持不变,n_tree的值不会影响搜索时间,反之亦然。 基本上,建议在可用负载量的情况下尽可能大地设置n_trees,并且考虑到查询的时间限制,建议将search_k设置为尽可能大。

