Apollo学习(1)—预测
前言
本文将对Apollo预测模块进行梳理,了解Apollo中进行预测的具体流程和工作原理
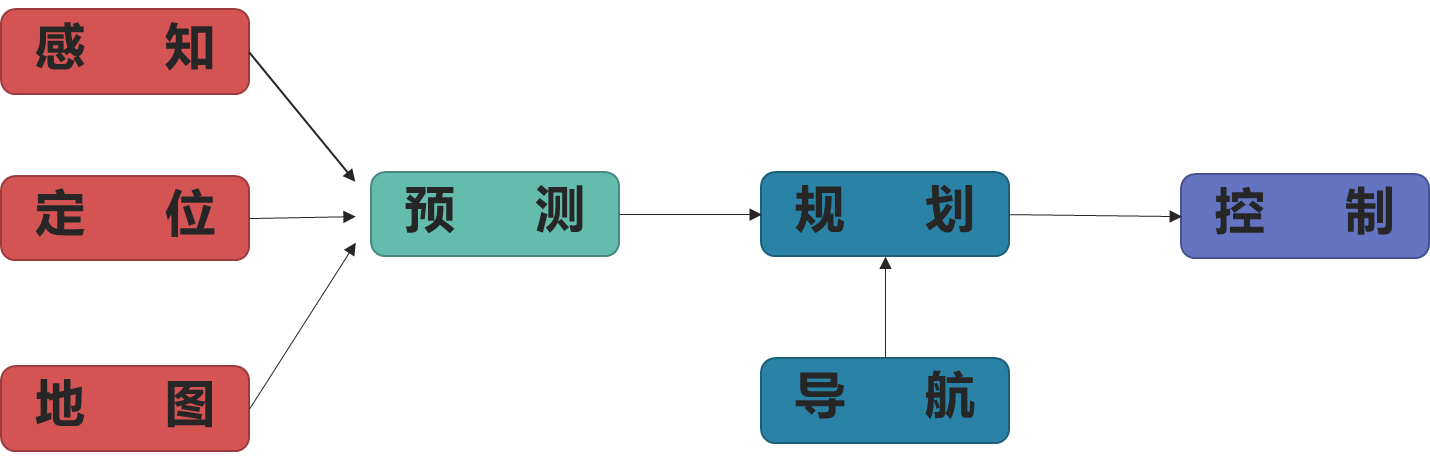
- 如上述架构图所示,预测处于感知与规划之间,它会对感知到的障碍物信息进行分析,并对障碍物未来一段时间内的行为及轨迹进行预测,并将信息反馈到规划模块,使规划模块能够生成更加合理、安全的轨迹
我会根据每个不同的文件,来对Apollo预测模块进行解读
1. ReadMe
预测模块中的ReadMe出了该模块的输入、输出和功能
- 输入: 障碍物信息、定位信息
- 输出:具有预测轨迹的障碍物
- 功能: 预测模块实现预测轨迹输出的一些组件,由容器、评估器和预测器构成。
2.prdiction_component
在predictiond模块中,可以看到prdiction_component,其会对该模块进行相关初始化操作
// 如果需要,则对该模块下相关数据进行初始化
bool Init() override;
//init中主要对相关Manager对象以及向cyber中的reader和writer进行对应初始化
// 接收感知模块传来的障碍信息进行处理
bool Proc(const std::shared_ptr<perception::PerceptionObstacles>&) override;
//头文件中同时设置了四个管理器对象
std::shared_ptr<ContainerManager> container_manager_;//容器
std::unique_ptr<EvaluatorManager> evaluator_manager_;//评估
std::unique_ptr<PredictorManager> predictor_manager_;//预测
std::unique_ptr<ScenarioManager> scenario_manager_;//场景
//...还有cyber相关的reader和writer...
std::shared_ptr<cyber::Reader<planning::ADCTrajectory>> planning_reader_;//读取规划信息(作用未知)
std::shared_ptr<cyber::Reader<localization::LocalizationEstimate>>
localization_reader_;//读取位置信息(作用未知)
std::shared_ptr<cyber::Reader<storytelling::Stories>> storytelling_reader_;//storytelling?
2.1 Proc
- 该函数会对接收到的信息进行处理,对信息处理这里使用了两种情况:ContainerSubmoduleProcess和PredictionEndToEndProc
这里主要对PredictionEndToEndProc进行解读
//1.对位置信息进行获取(本车位置信息?)
localization_reader_->Observe();//observer()调用的node中的数据
auto ptr_localization_msg = localization_reader_->GetLatestObserved();//获取最新的位置信息(获取message对列中前面的数据块)
MessageProcess::OnLocalization(container_manager_.get(),
*ptr_localization_msg);
//2. 读取storytelling模块信息(stroytell作用?)
storytelling_reader_->Observe();
auto ptr_storytelling_msg = storytelling_reader_->GetLatestObserved();//同理
//读取最后一帧规划信息(但规划需要先有预测?)
if (ptr_storytelling_msg != nullptr) {
MessageProcess::OnStoryTelling(container_manager_.get(),*ptr_storytelling_msg);
}
planning_reader_->Observe();
auto ptr_trajectory_msg = planning_reader_->GetLatestObserved();
if (ptr_trajectory_msg != nullptr) {
MessageProcess::OnPlanning(container_manager_.get(), *ptr_trajectory_msg);
}
//3. 读取感知的障碍物信息
auto perception_msg = *perception_obstacles;
PredictionObstacles prediction_obstacles;
MessageProcess::OnPerception(
perception_msg, container_manager_, evaluator_manager_.get(),
predictor_manager_.get(), scenario_manager_.get(), &prediction_obstacles);
//在得到prediction_obstacles后,会有一些后续处理
- 在对信息进行处理过程中,可以发现都是从localization_reader、storytelling_reader_、planning_reader_中读取信息,并且交由MessageProcess类进行处理,MessageProcess处理就是将这些信息存放到对应的容器中去,最后调用MessageProcess::OnPerception,其中会使用评估器、预测器来对获取的信息进行处理

3.MessageProcess
- PredictionEndToEndProc对数据进行获取,其中各个reader读取最新的消息,这些消息读取后存储至对应的容器中去。MessageProcess会对不同容器进行管理,同时调用OnPerception进行处理。下面则是MessageProcess的头文件
//这里会对容器、评估器、预测器进行初始化
static bool Init(ContainerManager *container_manager,
EvaluatorManager *evaluator_manager,
PredictorManager *predictor_manager,
const PredictionConf &prediction_conf);
static bool InitContainers(ContainerManager *container_manager);
static bool InitEvaluators(EvaluatorManager *evaluator_manager,
const PredictionConf &prediction_conf);
static bool InitPredictors(PredictorManager *predictor_manager,
const PredictionConf &prediction_conf);
//通过获取的容器、评估器、预测器、场景对障碍物信息进行处理(主要)
static void OnPerception(
const perception::PerceptionObstacles &perception_obstacles,
const std::shared_ptr<ContainerManager> &container_manager,
EvaluatorManager *evaluator_manager, PredictorManager *predictor_manager,
ScenarioManager *scenario_manager,
PredictionObstacles *const prediction_obstacles);
//将获取的相关信息,存储到对应容器中去,例如localization信息,存到PoseContainer中(在Prediction中存储了多个容器,来存储不同对象的信息)
static void OnLocalization(
ContainerManager *container_manager,
const localization::LocalizationEstimate &localization);
static void OnPlanning(ContainerManager *container_manager,
const planning::ADCTrajectory &adc_trajectory);
static void OnStoryTelling(ContainerManager *container_manager,
const storytelling::Stories &story);
- MessageProcess中OnPerception是对获取的感知数据进行处理,并进行相关的评估、预测
//对容器信息进行处理
//这里会将container_manager中的相关信息进行处理,其中一个就是将scenario_manager中的信息提取,每个障碍物中会存储其对应的场景信息
ContainerProcess(container_manager, perception_obstacles, scenario_manager);
//将障碍物信息获取
auto ptr_obstacles_container =
container_manager->GetContainer<ObstaclesContainer>(
AdapterConfig::PERCEPTION_OBSTACLES);
CHECK_NOTNULL(ptr_obstacles_container);
//获取规划曲线容器(规划怎么结合呢?)
auto ptr_ego_trajectory_container =
container_manager->GetContainer<ADCTrajectoryContainer>(
AdapterConfig::PLANNING_TRAJECTORY);
CHECK_NOTNULL(ptr_ego_trajectory_container);
//评估器运行(obstacles信息和规划信息)
evaluator_manager->Run(ptr_ego_trajectory_container,ptr_obstacles_container);
//预测器运行
predictor_manager->Run(perception_obstacles, ptr_ego_trajectory_container,ptr_obstacles_container);
//将结果返回,prediction_obstacles传进来的就是指针,相当于返回了
*prediction_obstacles = predictor_manager->prediction_obstacles();
在OnPerception将容器的中的相关信息再做一个处理,然后通过获取obstacles、planing的相关信息进行评估和预测
4.Evaluator
- 评估器中会将不同障碍物处理进行处理,并根据障碍物类型、所处场景来返回对应的评估器对其进行评估。同样我们通过代码进行了解
//这里选择三个函数进行了解
//根据配置文件对评估器进行相关评估器
void Init(const PredictionConf& config);
//评估器接收信息,进行调用的接口,messageprocess调用的该接口
void Run(const ADCTrajectoryContainer* adc_trajectory_container,
ObstaclesContainer* obstacles_container){
if (FLAGS_enable_multi_thread) {
IdObstacleListMap id_obstacle_map;//获得障碍物的列表?
GroupObstaclesByObstacleIds(obstacles_container, &id_obstacle_map);
//下面开辟预测线程,来对障碍物进行评估
PredictionThreadPool::ForEach(
id_obstacle_map.begin(), id_obstacle_map.end(),
[&](IdObstacleListMap::iterator::value_type& obstacles_iter) {
for (auto obstacle_ptr : obstacles_iter.second) {
EvaluateObstacle(adc_trajectory_container, obstacle_ptr,
obstacles_container, dynamic_env);//这里感觉就在评估,获取相对应评估器
//这里进行评估的时候,用了轨迹规划容器
}
});
}
}
//这里是对每个障碍物进行检测的地方
//这里在进行评估时,就是一个switch了,函数对障碍物的类型、状态和所处场景
void EvaluateObstacle(const ADCTrajectoryContainer* adc_trajectory_container,
Obstacle* obstacle,
ObstaclesContainer* obstacles_container,
std::vector<Obstacle*> dynamic_env){
//直接进行判定
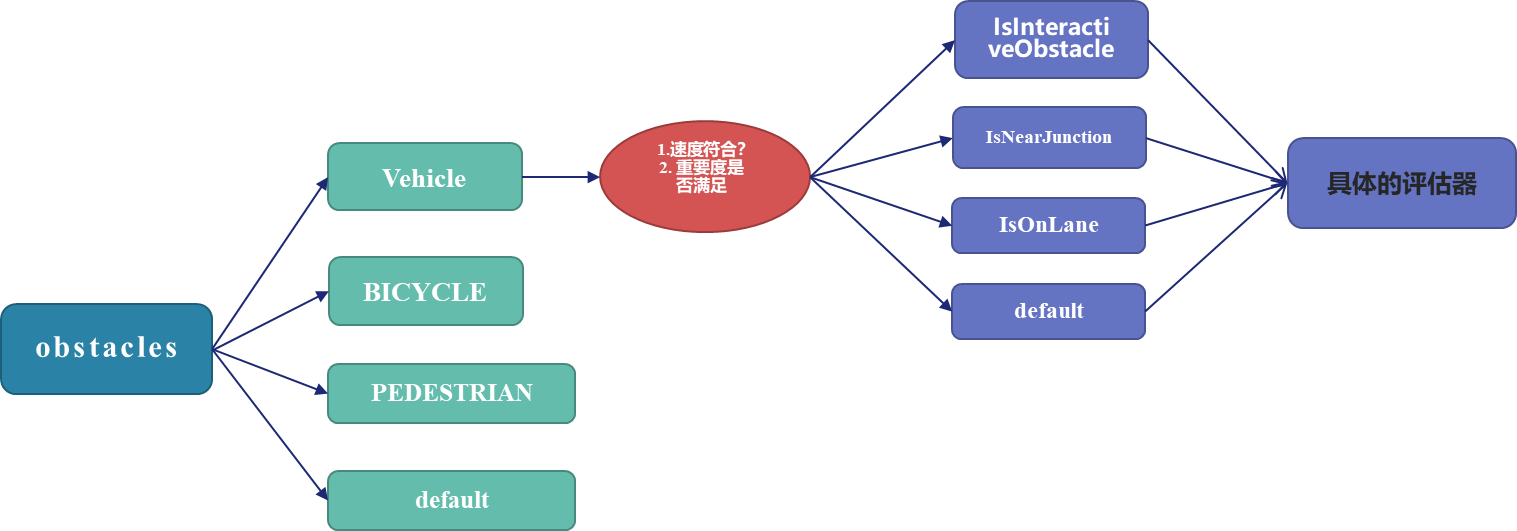
switch (obstacle->type()){
//Apollo中对障碍物分为了三类:轿车、自行车和行人,以及一个默认类型
//其中对Vehicle类型判定是最多的
case PerceptionObstacle::VEHICLE:{
//对车辆的状态评估,在对其所处环境进行评估,然后获取对应的评估器进行评估
if (obstacle->IsCaution() && !obstacle->IsSlow()) {
if (obstacle->IsInteractiveObstacle()) {
evaluator = GetEvaluator(interaction_evaluator_);//获取对应类型的评估
} else if (obstacle->IsNearJunction()) {
evaluator = GetEvaluator(vehicle_in_junction_caution_evaluator_);
} else if (obstacle->IsOnLane()) {
evaluator = GetEvaluator(vehicle_on_lane_caution_evaluator_);
} else {
evaluator = GetEvaluator(vehicle_default_caution_evaluator_);
}
//...
if (evaluator->Evaluate(obstacle, obstacles_container)) {
break;//进行相关条件检测后则进行评估
} else {
AERROR << "Obstacle: " << obstacle->id()
<< " caution evaluator failed, downgrade to normal level!";
}
}
}
case PerceptionObstacle::BICYCLE: {
}
case PerceptionObstacle::PEDESTRIAN:{
}
default: {
}
}
- evaluator->Evaluate(obstacle, obstacles_container))
Evaluate是一个虚函数,在EvaluatorManager中存在多个不同的评估器,这些评估器都会继承Evaluate类并重写Evaluate,所以这里就是调用对应评估函数进行评估。 - EvaluatorManager头文件中定义了多个评估器,如下
//评估器类型:vehicle_on_lane
ObstacleConf::EvaluatorType vehicle_on_lane_evaluator_ =
ObstacleConf::CRUISE_MLP_EVALUATOR;//MLP
// 评估器:vehicle_on_lane_caution
ObstacleConf::EvaluatorType vehicle_on_lane_caution_evaluator_ =
ObstacleConf::CRUISE_MLP_EVALUATOR;//MLP
// 评估器:vehicle_in_junction
ObstacleConf::EvaluatorType vehicle_in_junction_evaluator_ =
ObstacleConf::JUNCTION_MLP_EVALUATOR;//MLP
// 评估器:vehicle_on_junction_caution
ObstacleConf::EvaluatorType vehicle_in_junction_caution_evaluator_ =
ObstacleConf::JUNCTION_MAP_EVALUATOR;//MAP
// 评估器:vehicle_defaut_caution评估器
ObstacleConf::EvaluatorType vehicle_default_caution_evaluator_ =
ObstacleConf::SEMANTIC_LSTM_EVALUATOR;//LSTM
// 自行车_on_lanep 评估器
ObstacleConf::EvaluatorType cyclist_on_lane_evaluator_ =
ObstacleConf::CYCLIST_KEEP_LANE_EVALUATOR;//keep_lane保持车道
// 行人评估器
ObstacleConf::EvaluatorType pedestrian_evaluator_ =
ObstacleConf::SEMANTIC_LSTM_EVALUATOR;//LSTM
// vectornet 评估器
ObstacleConf::EvaluatorType vectornet_evaluator_ =
ObstacleConf::VECTORNET_EVALUATOR;//vectornet
// on_lane 评估器
ObstacleConf::EvaluatorType default_on_lane_evaluator_ =
ObstacleConf::MLP_EVALUATOR;
// 交互评估器
ObstacleConf::EvaluatorType interaction_evaluator_ =
ObstacleConf::JOINTLY_PREDICTION_PLANNING_EVALUATOR;
Apollo中对评估器做出过解释:评估器对任何给定的障碍分别预测路径和速度。评估器通过使用存储在prediction/data/模型中的给定模型输出路径的概率来评估路径(车道序列)。
- 将提供三种类型的评估器,包括:
- 成本评估器:概率是由一组成本函数计算的。
- MLP评估器:用MLP模型计算概率
- RNN评估器:用RNN模型计算概率
- 预测规划交互评估器:vectornet(论文:https://arxiv.org/pdf/2005.04259v1.pdf)
预测器
预测器中得到评估器计算得到的概率,生成该障碍物的轨迹,在Apollo中有所总结:
- 预测器生成障碍物的预测轨迹。当前支持的预测器包括:
- 空:障碍物没有预测的轨迹
- 单行道:在公路导航模式下障碍物沿着单条车道移动。不在车道上的障碍物将被忽略。
- 车道顺序:障碍物沿车道移动
- 移动序列:障碍物沿其运动模式沿车道移动
- 自由运动:障碍物自由移动
- 区域运动:障碍物在可能的区域中移动


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律