支持向量机(理论+opencv实现)
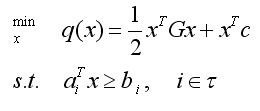
3.线性中的对偶
线性规划有一个有趣的特性,就是任何一个求极大的问题都有一个与其匹配的求极小的线性规划问题。
例;原问题为
MAX X=8*Z1+10*Z2+2*Z3
s.t. 2*Z1+1*Z2+3*Z3 <=70
4*Z1+2*Z2+2*Z3 <=80
3*Z1+ 1*Z3 <=15
2*Z1+2*Z2 <=50
Z1,Z2,Z3 〉=0
Z则其对偶问题为
MIN =70*Y1+80*Y2+15*Y3+50*Y4
s.t 2*y1+4*y2+3*y3+2*y4>=8
1*y1+2*y2+ 1*y4>=10
3*y1+2*y2+1*y3 >=2
y1,y2,y3,y3>=0
可以看出:
1、若一个模型为目标求 极大 约束为 小于等于的不等式,则它的对偶模型为目标求极小 约束为极大的不等式
即 “MAX,〈=” “与MIN,〉=”相对应
2、从约束条件系数矩阵来看,一个模型中为A 另一个为A的转质,一个模型是 m个约束n个变量 则他的对偶模型为n个约束 m个变量
3、从数据b c 的位置看 两个规划模型中b和 c的位置对换
即8、10、2 与 70、80、15、50 对换
4、两个规划模型中变量非负。
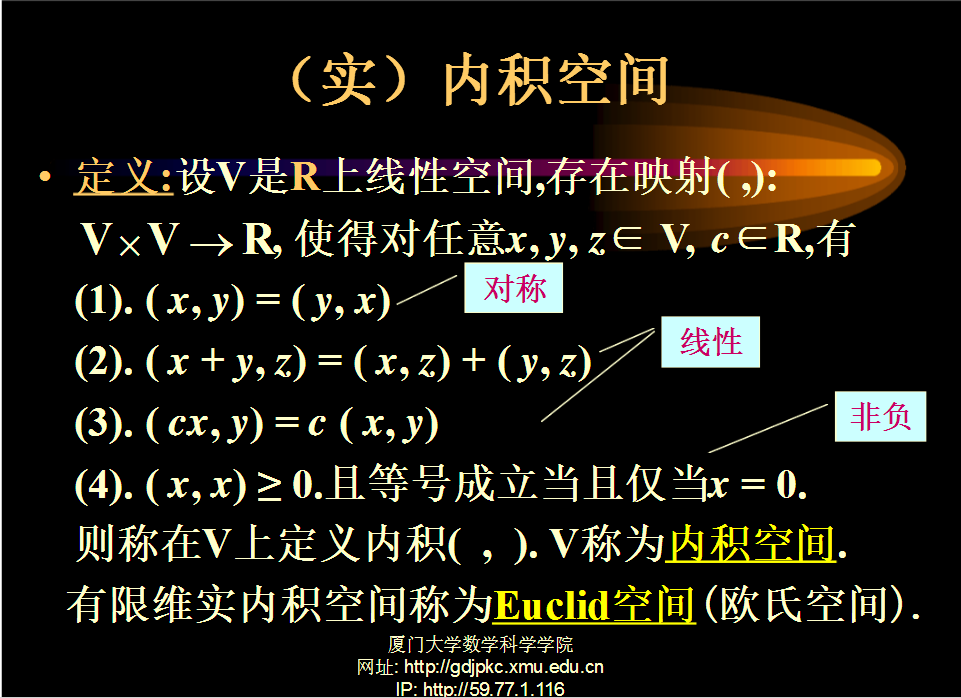
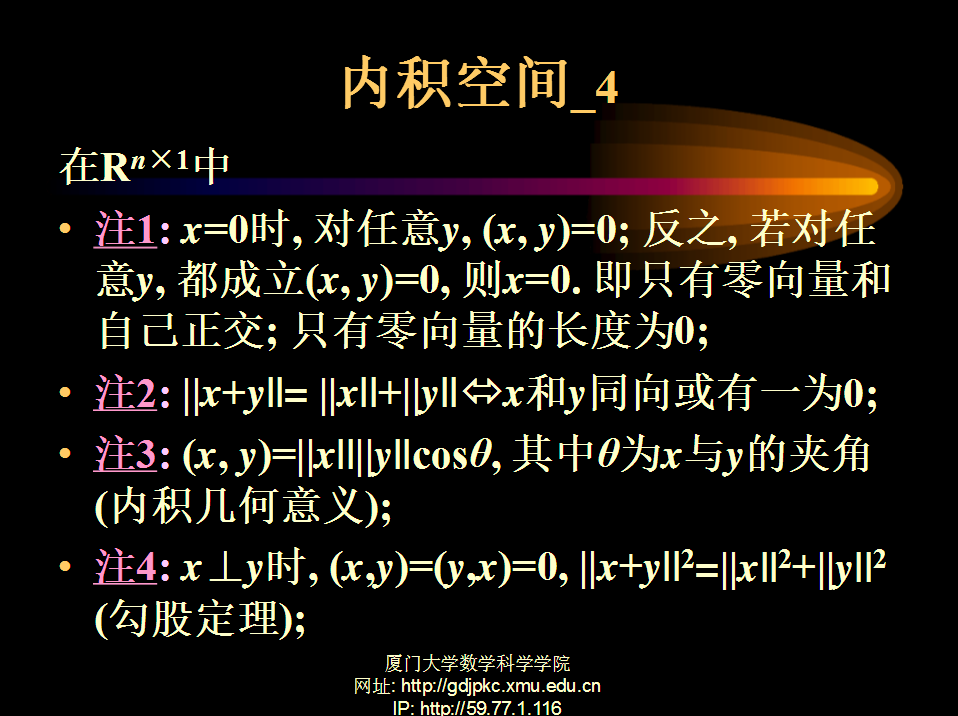
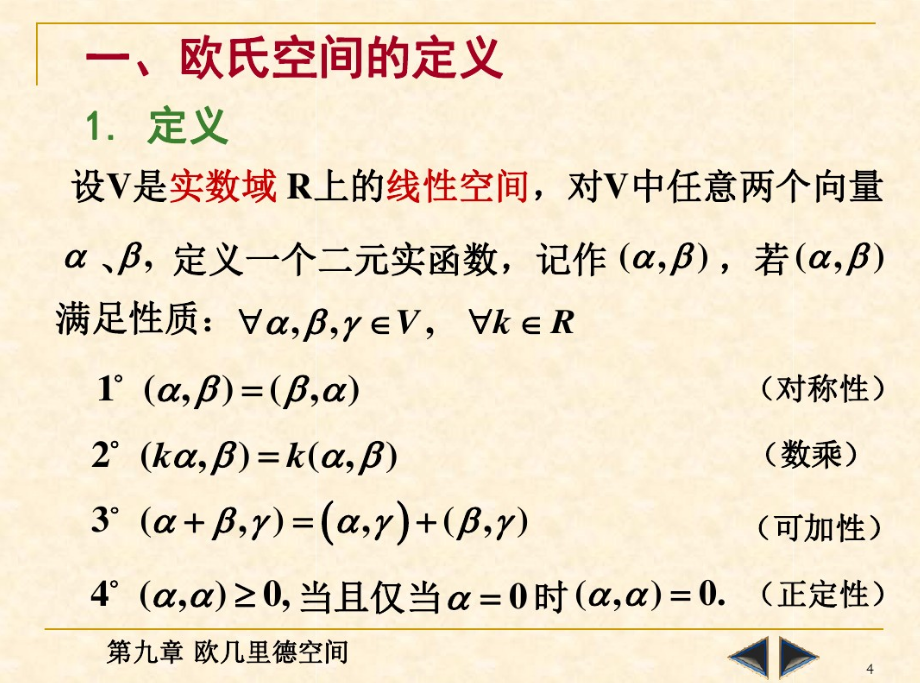
4. 内积空间

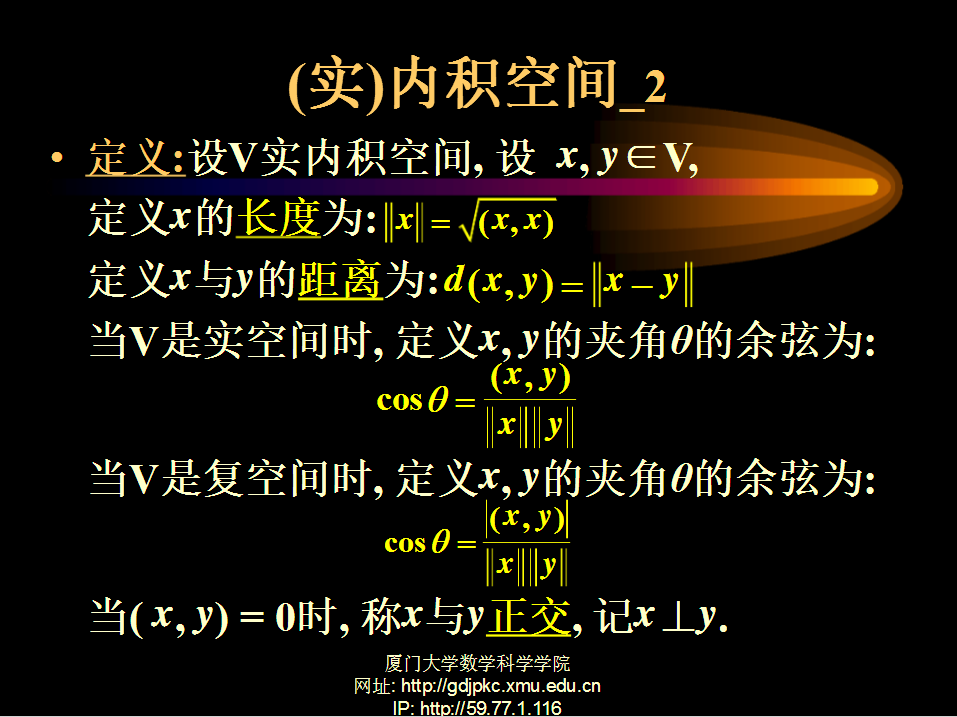

5.欧式空间

6.线性空间、希尔伯特空间、巴拿赫空间


在数学中有许多空间表示,比如欧几里德空间、赋范空间、希尔伯特空间等。这些空间之间有什么关系呢?
首先要从距离的定义说起。
什么是距离呢?实际上距离除了我们经常用到的直线距离外,还有向量距离如Σni=1xi⋅yi−−−−−−−−√, 函数距离如∫ba(f(x)−g(x))2dx、 曲面距离、折线距离等等,这些具体的距离与距离之间的关系类似于苹果、香蕉等与水果的关系,前面是具体的事物,后面是抽象的概念。距离就是一个抽象的概念,其定义为:
设X是任一非空集,对X中任意两点x,y,有一实数d(x,y)与之对应且满足:
1. d(x,y) ≥0,且d(x,y)=0当且仅当x=y;
2. d(x,y)=d(y,x);
3. d(x,y) ≤d(x,z)+d(z,y)。
称d(x,y)为X中的一个距离。
定义了距离后,我们再加上线性结构,如向量的加法、数乘,使其满足加法的交换律、结合律、零元、负元;数乘的交换律、单位一;数乘与加法的结合律(两个)共八点要求,从而形成一个线性空间,这个线性空间就是向量空间。
在向量空间中,我们定义了范数的概念,表示某点到空间零点的距离:
1. ||x|| ≥0;
2. ||ax||=|a|||x||;
3. ||x+y||≤||x||+||y||。
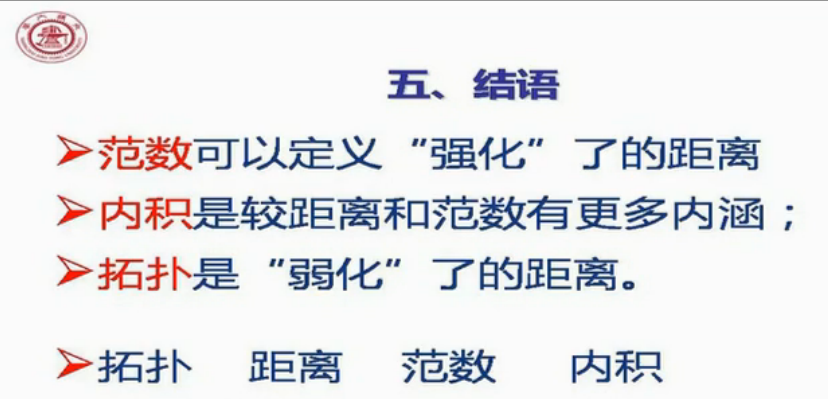
将范数与距离比较,可知,范数比距离多了一个条件2,数乘的运算,表明其是一个强化了的距离概念。范数与距离的关系可以类似理解为与红富士苹果与苹果的关系。
接下来对范数和距离进行扩展,形成如下:
范数的集合⟶ 赋范空间+线性结构⟶线性赋范空间
距离的集合⟶ 度量空间+线性结构⟶线性度量空间
下面在已经构成的线性赋范空间上继续扩展,添加内积运算,使空间中有角的概念,形成如下:
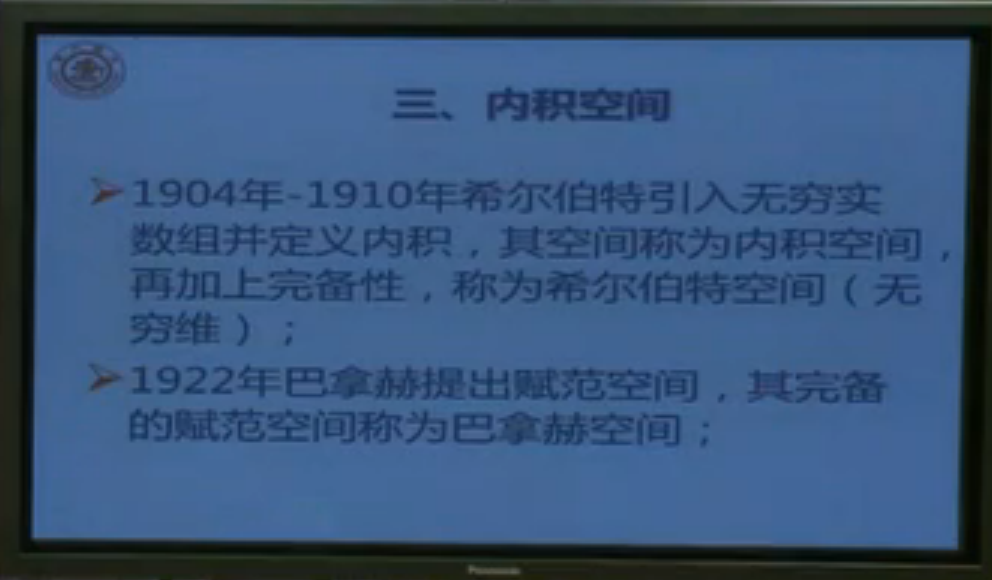
线性赋范空间+内积运算⟶ 内积空间;
这时的内积空间已经有了距离、长度、角度等,有限维的内积空间也就是我们熟悉的欧氏空间。
继续在内积空间上扩展,使得内积空间满足完备性,形成希尔伯特空间如下:
内积空间+完备性⟶ 希尔伯特空间
其中完备性的意思就是空间中的极限运算不能跑出该空间,如有理数空间中的2√ 的小数表示,其极限随着小数位数的增加收敛到2√,但2√ 属于无理数,并不在有理数空间,故不满足完备性。一个通俗的理解是把学校理解为一个空间,你从学校内的宿舍中开始一直往外走,当走不动停下来时(极限收敛),发现已经走出学校了(超出空间),不在学校范围内了(不完备了)。希尔伯特就相当于地球,无论你怎么走,都还在地球内(飞出太空除外)。
此外,前面提到的赋范空间,使其满足完备性,扩展形成巴拿赫空间如下:
赋范空间+完备性⟶ 巴拿赫空间
以上均是在距离的概念上进行添加约束形成的,递增关系如下:
距离⟶范数⟶内积
向量空间+范数⟶ 赋范空间+线性结构⟶线性赋范空间+内积运算⟶内积空间+完备性⟶希尔伯特空间
内积空间+有限维⟶欧几里德空间
赋范空间+完备性⟶巴拿赫空间
顺便提以下,对距离进行弱化,保留距离的极限和连续概念,就形成拓扑的概念。
有了上面的基础知识,下面开始支持向量机的理论学习
注:已经有很多关于SVM的优秀文章,自认为我距离大牛很远而且表达的没他们好,所以接下来的分析是我觉得难懂的地方,或者自认为老师和前辈们感觉太简单没说到的地方。
1.开篇距离公式推导
推导如下的公式:


2.SMO算法(主体来自博客,下面会给出链接,自己更改的部分已经标注)
假设我们选取了初始值![]() 满足了问题中的约束条件。接下来,我们固定
满足了问题中的约束条件。接下来,我们固定![]() ,这样W就是
,这样W就是![]() 和
和![]() 的函数。并且
的函数。并且![]() 和
和![]() 满足条件:
满足条件:
由于  ,所以推到出:
,所以推到出:
由于![]() 都是已知固定值,因此为了方面,可将等式右边标记成实数值
都是已知固定值,因此为了方面,可将等式右边标记成实数值![]() 。
。
![]()
当![]() 和
和![]() 异号时,也就是一个为1,一个为-1时,他们可以表示成一条直线:a1-a2=ζ,相当于x-y=c作图,斜率为1。如下图:
异号时,也就是一个为1,一个为-1时,他们可以表示成一条直线:a1-a2=ζ,相当于x-y=c作图,斜率为1。如下图:
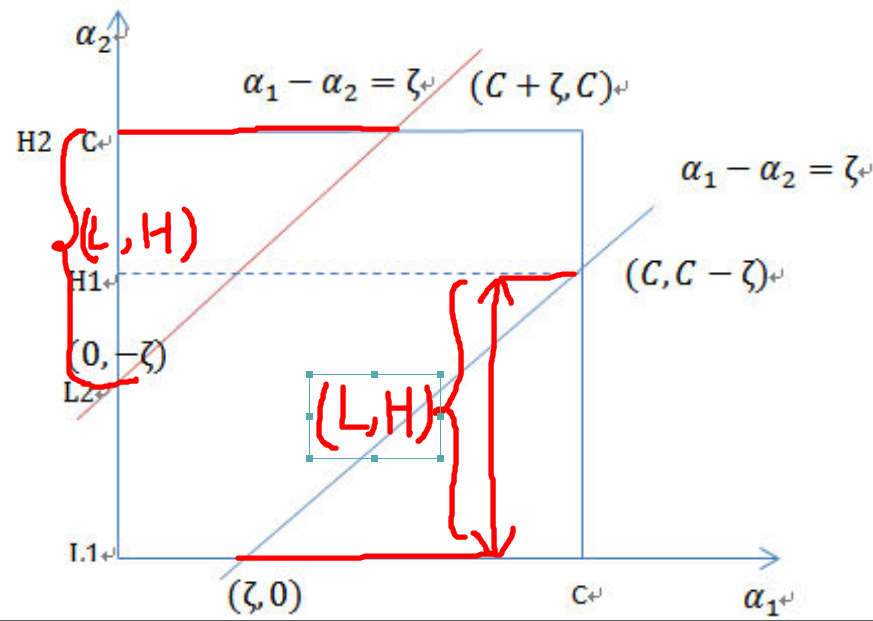
横轴是![]() ,纵轴是
,纵轴是![]() ,
,![]() 和
和![]() 既要在矩形方框内,也要在直线上,因此
既要在矩形方框内,也要在直线上,因此
![]() ,
,![]()
注:这里L、H表示a1给定之后a2的取值范围,从图中可以看到a2取值两种情况,其中{0,C-ζ}属于一条直线、{-ζ,C}属于一条直线,且后者在前者之上,那么:
a2的最小值从{0,-ζ}取最大的值,a2的最大值从{C-ζ,C}取最小的值,因为 ζ = a1 - a2,所以:
同理,当![]() 和
和![]() 同号时,
同号时,
![]() ,
,![]()
opencv实现SVM
按照以前的性格肯定是用C++把SVM写出来,现在感觉没多大意思,因为很多算法都要自己去实现太难了而且没那么多时间,毕竟现在还用不到SVM,先用opencv自带的例子测试再说。
本文用的opencv3.1实现的非线性分类,看了网上的基本都是2.4或者2.9,要么就是用的线性实现的,弄了很长世间才实现!
其实主要是讲解一些参数的意义和怎么调用:
SVM的类型:
1 enum Types { 2 /** C-Support Vector Classification. n-class classification (n \f$\geq\f$ 2), allows 3 imperfect separation of classes with penalty multiplier C for outliers. */ 4 C_SVC=100, //C类支持向量分类机。 n类分组 (n≥2),允许用异常值惩罚因子C进行不完全分类。 5 /** \f$\nu\f$-Support Vector Classification. n-class classification with possible 6 imperfect separation. Parameter \f$\nu\f$ (in the range 0..1, the larger the value, the smoother 7 the decision boundary) is used instead of C. */ 8 NU_SVC=101,//类支持向量分类机。n类似然不完全分类的分类器。参数为
 类支持向量分类机。n类似然不完全分类的分类器。参数为
类支持向量分类机。n类似然不完全分类的分类器。参数为
核函数:
1 enum KernelTypes { 2 /** Returned by SVM::getKernelType in case when custom kernel has been set */ 3 CUSTOM=-1, 4 /** Linear kernel. No mapping is done, linear discrimination (or regression) is 5 done in the original feature space. It is the fastest option. \f$K(x_i, x_j) = x_i^T x_j\f$. */ 6 LINEAR=0,//线性核函数 7 /** Polynomial kernel: 8 \f$K(x_i, x_j) = (\gamma x_i^T x_j + coef0)^{degree}, \gamma > 0\f$. */ 9 POLY=1,//多项式函数(r*u'v + coef0)^degree 10 /** Radial basis function (RBF), a good choice in most cases. 11 \f$K(x_i, x_j) = e^{-\gamma ||x_i - x_j||^2}, \gamma > 0\f$. */ 12 RBF=2,//exp(-gamma|u-v|^2)基于径向的函数,对于大多数情况都是一个较好的选择: 13 /** Sigmoid kernel: \f$K(x_i, x_j) = \tanh(\gamma x_i^T x_j + coef0)\f$. */ 14 SIGMOID=3,//tanh(r*u'v + coef0) 15 /** Exponential Chi2 kernel, similar to the RBF kernel: 16 \f$K(x_i, x_j) = e^{-\gamma \chi^2(x_i,x_j)}, \chi^2(x_i,x_j) = (x_i-x_j)^2/(x_i+x_j), \gamma > 0\f$. */ 17 CHI2=4, 18 /** Histogram intersection kernel. A fast kernel. \f$K(x_i, x_j) = min(x_i,x_j)\f$. */ 19 INTER=5 20 };
核函数的参数:
成员变量degree针对多项式核函数degree的设置,
gamma针对多项式/rbf/sigmoid核函数的设置,
coef0针对多项式/sigmoid核函数的设置,
Cvalue为损失函数,在C-SVC、e-SVR、v-SVR中有效,
nu设置v-SVC、一类SVM和v-SVR参数,
p为设置e-SVR中损失函数的值,
class_weightsC_SVC的权重,
一些函数的参数:
1 TermCriteria::TermCriteria(int _type, int _maxCount, double _epsilon) 2 : type(_type), maxCount(_maxCount), epsilon(_epsilon) {} 3 //_type:迭代结束的类型,如果为CV_TERMCRIT_ITER,则用最大迭代次数作为终止条件,如果为CV_TERMCRIT_EPS 则用精度作为迭代条件,如果为CV_TERMCRIT_ITER+CV_TERMCRIT_EPS则用最大迭代次数或者精度作为迭代条件,看哪个条件先满足。 4 //_maxCount:终止程序的最大迭代次数 5 //_epsilon:终止程序的精度
1 train( InputArray samples, int layout, InputArray responses ); 2 //samples:输入数据 3 //layout: 读取数据方式 4 //----ROW_SAMPLE = 0, //!< 一行为一个样本 5 //----COL_SAMPLE = 1 //!< 一列为一个样本 6 //responses:返回的数据(默认为不返回)
上代码:
1 #include <opencv2/opencv.hpp> 2 #include <iostream> 3 #include "math.h" 4 5 using namespace cv; 6 using namespace std; 7 int test = 0; 8 RNG rng(99999); 9 void drawCross(Mat &img, Point center, Scalar color) 10 { 11 int col = center.x > 2 ? center.x : 2; 12 int row = center.y> 2 ? center.y : 2; 13 line(img, Point(col - 2, row - 2), Point(col + 2, row + 2), color); 14 line(img, Point(col + 2, row - 2), Point(col - 2, row + 2), color); 15 } 16 17 void newSvmTest(int rows, int cols, int testCount) 18 { 19 assert(testCount >= rows * cols); 20 21 Mat img = Mat::zeros(rows, cols, CV_8UC3); 22 Mat testPoint = Mat::zeros(rows, cols, CV_8UC1); 23 Mat data = Mat::zeros(testCount, 2, CV_32FC1); 24 Mat res = Mat::zeros(testCount, 1, CV_32SC1); 25 26 //Create random test points 27 for (int i = 0; i < testCount; i++) 28 { 29 int row = rng.uniform(0,255) % rows; 30 int col = rng.uniform(0,255) % cols; 31 //-----存储数据 32 if (testPoint.at<unsigned char>(row, col) == 0) 33 { 34 testPoint.at<unsigned char>(row, col) = 1; 35 data.at<float>(i, 0) = float(col) / cols; 36 data.at<float>(i, 1) = float(row) / rows; 37 } 38 else//防止重复 39 { 40 i--; 41 continue; 42 } 43 //分成三类 44 if (row > (50 * cos(col * CV_PI / 100) + 200)) 45 { 46 drawCross(img, Point(col, row), CV_RGB(255, 0, 0)); 47 res.at<unsigned int>(i, 0) = 1; 48 } 49 else 50 { 51 if (col > 200) 52 { 53 drawCross(img, Point(col, row), CV_RGB(0, 255, 0)); 54 res.at<unsigned int>(i, 0) = 2; 55 } 56 else 57 { 58 drawCross(img, Point(col, row), CV_RGB(0, 0, 255)); 59 res.at<unsigned int>(i, 0) = 3; 60 } 61 } 62 63 } 64 Mat show = img.clone(); 65 //----SVM训练 66 cv::Ptr<cv::ml::SVM> svm = cv::ml::SVM::create(); 67 svm->setType(cv::ml::SVM::Types::C_SVC); 68 svm->setKernel(cv::ml::SVM::KernelTypes::RBF); 69 svm->setDegree(3); 70 svm->setGamma(3); 71 svm->setCoef0(1.0); 72 svm->setC(10); 73 svm->setNu(0); 74 svm->setP(0.1); 75 svm->setTermCriteria(cv::TermCriteria(cv::TermCriteria::EPS, 1000, FLT_EPSILON)); 76 // train operation 77 svm->train(data, cv::ml::SampleTypes::ROW_SAMPLE, res); 78 //----预测数据 79 for (int i = 0; i< rows; i++) 80 { 81 for (int j = 0; j< cols; j++) 82 { 83 Mat m = Mat::zeros(1, 2, CV_32FC1); 84 m.at<float>(0, 0) = float(j) / cols; 85 m.at<float>(0, 1) = float(i) / rows; 86 87 float ret = 0.0; 88 ret = svm->predict(m); 89 Scalar rcolor; 90 91 switch ((int)ret) 92 { 93 case 1: rcolor = Scalar(100, 0, 0); break; 94 case 2: rcolor = Scalar(0, 100, 0); break; 95 case 3: rcolor = Scalar(0, 0, 100); break; 96 } 97 98 line(img, Point(j, i), Point(j, i), rcolor); 99 } 100 } 101 //-------获得支持向量 102 int thickness = 2; 103 int lineType = 8; 104 //Mat sv = svm->getUncompressedSupportVectors();//不能使用,不知道什么原因,网上有的人可以使用 105 Mat sv = svm->getSupportVectors(); 106 for (int i = 0; i < sv.rows; ++i) 107 { 108 const float* v = sv.ptr<float>(i); 109 circle(img, Point((int)(v[0]*600), (int)(v[1]*400)), 4, Scalar(255, 255, 255), thickness, lineType); 110 } 111 112 imshow("dst", img); 113 waitKey(0); 114 } 115 116 int main(int argc,char** argv[]) 117 { 118 newSvmTest(400, 600, 500); 119 return 0; 120 }

原图

SVM预测
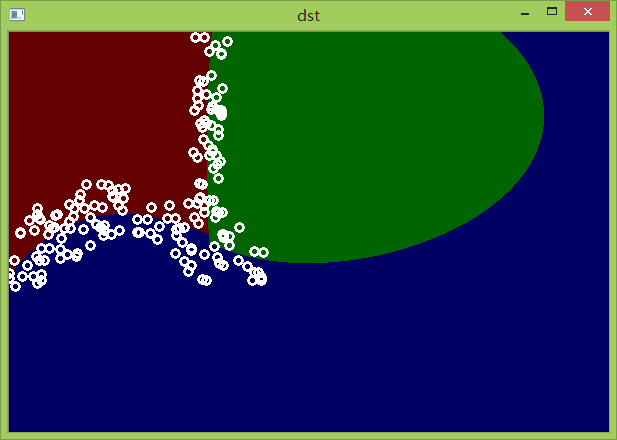
支持向量数据
参考: 百度文库(具体不标注了,都是公式和概念)
《机器学习》周志华老师
https://wenku.baidu.com/view/8f48d70e581b6bd97f19eaaf.html(内积空间)
https://wenku.baidu.com/view/8bee6e76b0717fd5360cdced.html(欧式空间)
http://open.163.com/movie/2013/3/T/0/M8PTB0GHI_M8PTBUHT0.html(网易公开课讲函数空间,讲的非常好!)
http://blog.csdn.net/shijing_0214/article/details/51052208(这篇博客是对上面视频的总结,本来想自己总结的,感觉这篇博文总结的很好,所以自己偷懒不写了)
http://blog.csdn.net/v_july_v/article/details/7624837(看了SMO感觉不错)
http://blog.csdn.net/v_july_v/article/details/7624837(July不用说的大牛,写的非常详细,配合上面的资料就更容易理解)
http://www.pami.sjtu.edu.cn/people/gpliu/document/libsvm_src.pdf(代码解释,还没看)
http://blog.csdn.net/zhazhiqiang/article/details/20146243(很全的opencv实现SVM)
http://blog.csdn.net/firefight/article/details/6400060(程序核心是参考这篇文章,此博客opencv版本太低,很多不适合)
http://blog.csdn.net/changyuanchn/article/details/7540014(opencv SVM参数在这篇文章)
-------------------------------------------
个性签名:衣带渐宽终不悔,为伊消得人憔悴!
如果觉得这篇文章对你有小小的帮助的话,记得关注再下的公众号,同时在右下角点个“推荐”哦,博主在此感谢!

