Group Normalization
Group Normalization
一. 论文简介
主要做的贡献如下(可能之前有人已提出):
- 类似BN的一种归一化,使用group进行归一化
二. 模块详解
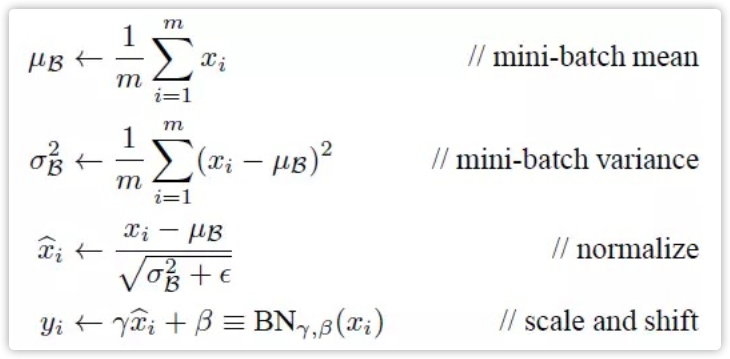
2.1 BN的做法
- 设 \(X\) 为输入的 \(batch\) 数据,\(\mu_B、\sigma_B\) 为当前 \(batch\) 的均值和方差,\(running\_u、runnnig\_\sigma\) 为滑动平均(全局)的均值和方差(初始化为0和1),\(\beta、\gamma\) 为梯度更新的均值和方差
- 通过输入 \(X\) 计算当前均值和方差 \(\mu_B、\sigma_B\)
- 使用 \(\mu_B、\sigma_B\) 归一化当前输入 \(X\)
- 通过 \(moving\_momentum\) 和当前均值和方差更新全局均值和方差
- 使用梯度更新的均值和方差还原输入的 \(X\)
- 下面的图不全,仅仅包含一部分,请参考代码
# 参考https://blog.csdn.net/weixin_40123108/article/details/83509838
def batch_norm_1d(x, gamma, beta, is_training, moving_mean, moving_var, moving_momentum=0.1):
eps = 1e-5
x_mean = torch.mean(x, dim=0, keepdim=True) # 保留维度进行 broadcast
x_var = torch.mean((x - x_mean) ** 2, dim=0, keepdim=True)
if is_training:
x_hat = (x - x_mean) / torch.sqrt(x_var + eps)
moving_mean[:] = moving_momentum * moving_mean + (1. - moving_momentum) * x_mean
moving_var[:] = moving_momentum * moving_var + (1. - moving_momentum) * x_var
else:
x_hat = (x - moving_mean) / torch.sqrt(moving_var + eps)
return gamma.view_as(x_mean) * x_hat + beta.view_as(x_mean)
2.2 GN的做法
- 整体思想看下图一目了然
- 论文给的代码中没有滑动平均,由于和 \(Batch\) 无关,所以不需要滑动平均。因为如果使用滑动平均,不如直接在 \(batch\) 上平均,反正也算是多个数(见下图四,在N上取平均近似等于滑动平均)

# TF 版本源论文
def GroupNorm(x, gamma, beta, G, eps=1e−5):
# x: input features with shape [N,C,H,W]
# gamma, beta: scale and offset, with shape [1,C,1,1] # G: number of groups for GN
N, C, H, W = x.shape
x = tf.reshape(x, [N, G, C // G, H, W])
mean, var = tf.nn.moments(x, [2, 3, 4], keep dims=True) x = (x − mean) / tf.sqrt(var + eps)
x = tf.reshape(x, [N, C, H, W]) return x ∗ gamma + beta
# pytorch版本:https://zhuanlan.zhihu.com/p/56219719
import numpy as np
import torch
import torch.nn as nn
class GroupNorm(nn.Module):
def __init__(self, num_features, num_groups=32, eps=1e-5):
super(GroupNorm, self).__init__()
self.weight = nn.Parameter(torch.ones(1,num_features,1,1))
self.bias = nn.Parameter(torch.zeros(1,num_features,1,1))
self.num_groups = num_groups
self.eps = eps
def forward(self, x):
N,C,H,W = x.size()
G = self.num_groups
assert C % G == 0
x = x.view(N,G,-1)
mean = x.mean(-1, keepdim=True)
var = x.var(-1, keepdim=True)
x = (x-mean) / (var+self.eps).sqrt()
x = x.view(N,C,H,W)
return x * self.weight + self.bias
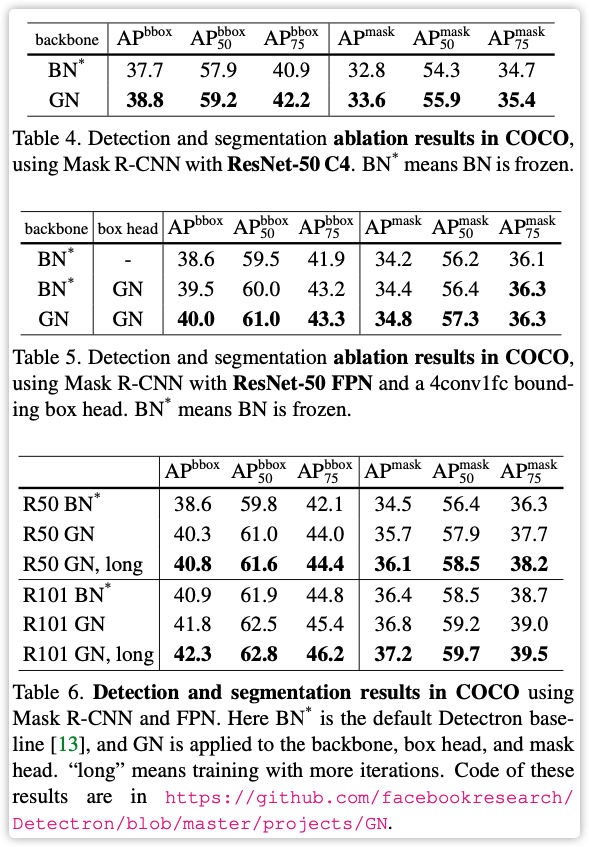
- 看论文试验,针对大网络小 \(batch\) 有作用,正常网络单GPU大于32还是使用BN比较好
三. 参考文献
作者:影醉阏轩窗
-------------------------------------------
个性签名:衣带渐宽终不悔,为伊消得人憔悴!
如果觉得这篇文章对你有小小的帮助的话,记得关注再下的公众号,同时在右下角点个“推荐”哦,博主在此感谢!


