

卷积神经网络(CNN)基础
Padding and stride

一个N*N的图像,使用f*f的卷积核,会得到(n-f+1)*(n-f+1)的大小
但是边缘的图像 使用了一次,而且整个图像缩小了
因此,可以增加一圈padding,假设增加的padding 的长度为p
会得到(n+2p-f+1)*(n+2p-f+1)的图像
通常由两种卷积方式
“Valid”:不填充
“Same”:填充2p,使得输入输出相同大小
(n+2p-f+1)==n→2p+1-f==0→p=(f-1)/2
所以f通常情况下为奇数
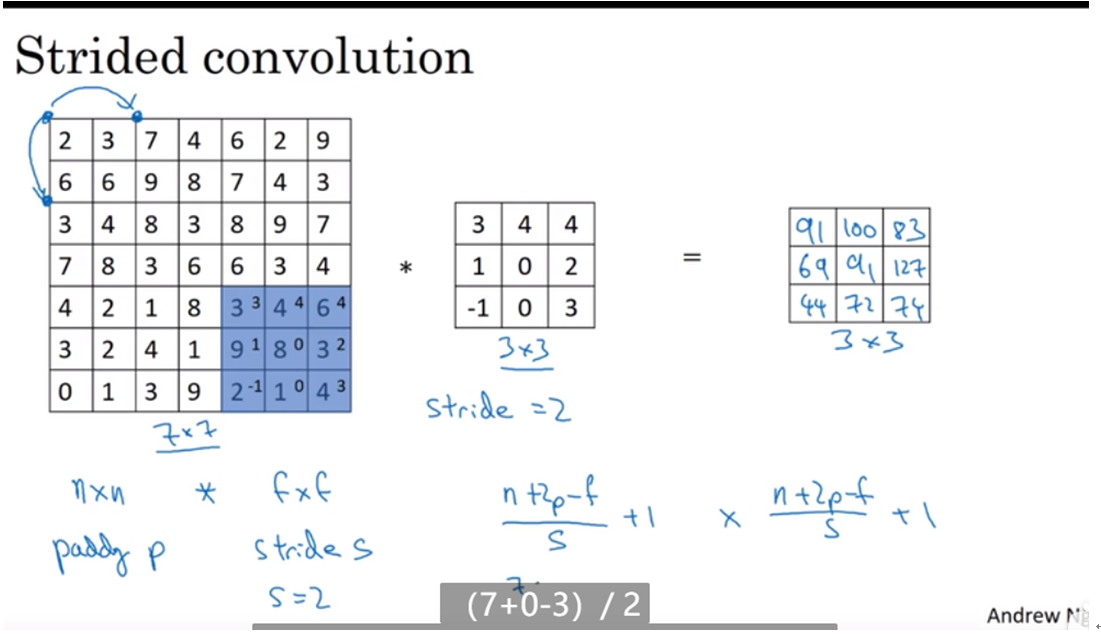
如果加入了Stride
那么输出的图像大小就变成[(n+2p-f)/s+1]* [(n+2p-f)/s+1]
//n+2p-f 剩余长度 /s 移动个数 +1 初始位置
如果除法(n+2p-f)/s不是一个整数,一般向下取整数,即放弃最后一个不完全的框
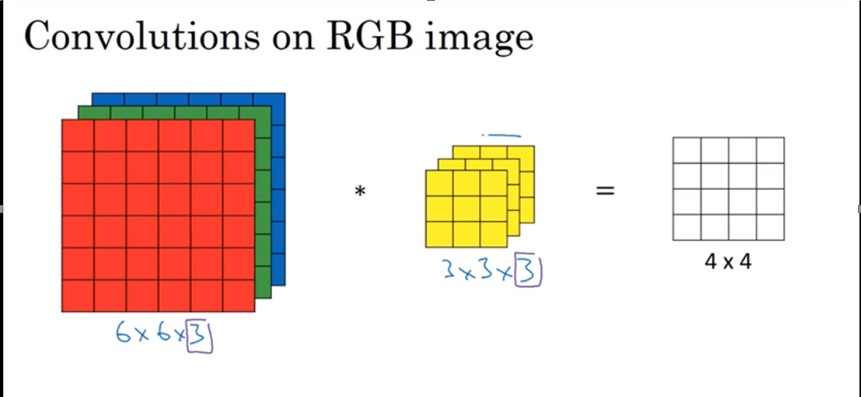
三维卷积
计算方式:对应位置的数字相乘,将乘积的和放在对应的位置
可以为三个通道的过滤器,设置不同的过滤器,但是过滤器的通道数必须和原图一样
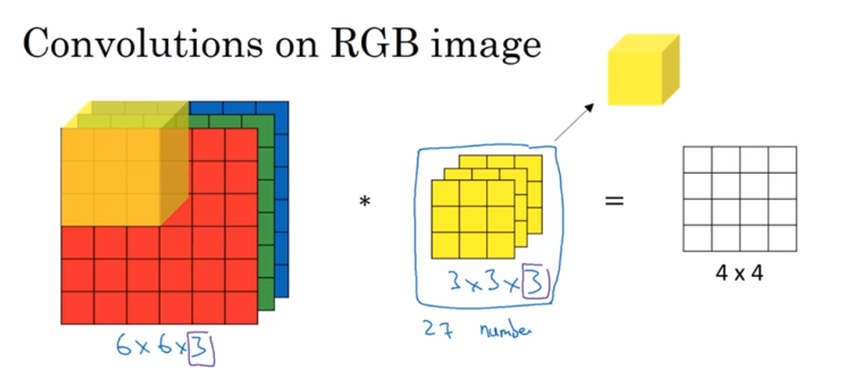
我们可以设置多个过滤器,例如相对Red层即检测垂直边界,又检测水平边界,那么我们可以选择通过两个立体过滤器,如下图中,橙色和黄色为不同的过滤器,将结果组合,就得到下一层的输入

Summary:
N*N*n_channels * f*f*n_channels → (n-f+1)*(n-f+1)*number of n_channels
6*6*3 3*3*3 4 * 4 * 2
单层卷积网络

Input: Nh[l-1]* Nw[l-1]*Nc[l-1] width*height*channels_num in layer l-1
Output: Nh[l]* Nw[l]*Nc[l] width*height*channels_num in layer l
Each filter is: f[l]*f[l]*Nc[l-1] f*f* channels_num in layer l-1
Activations: a[l]= Nh[l]* Nw[l]*Nc[l] A[l]= m*Nh[l]* Nw[l]*Nc[l]
Weight: Each filter * filter_num f[l]*f[l]*Nc[l-1]*Nc[l]
Bias: (1,1,1,Nc[l]) 横向排列组合的一排小立方体
为什么使用卷积
卷积可以减少参数量
参数共享
同一个卷积核可以在不同区域中使用,例如垂直边界卷积核可以在多次使用
稀疏链接
每一层中的输出仅仅和上一层中的几个参数相关,例如一个3*3的filter仅仅涉及9个参数
池化
特殊的过滤器,对一个块内的信息做不同的操作,eg,max、average,
Hyperparameter超参:filter size、stride
全连接
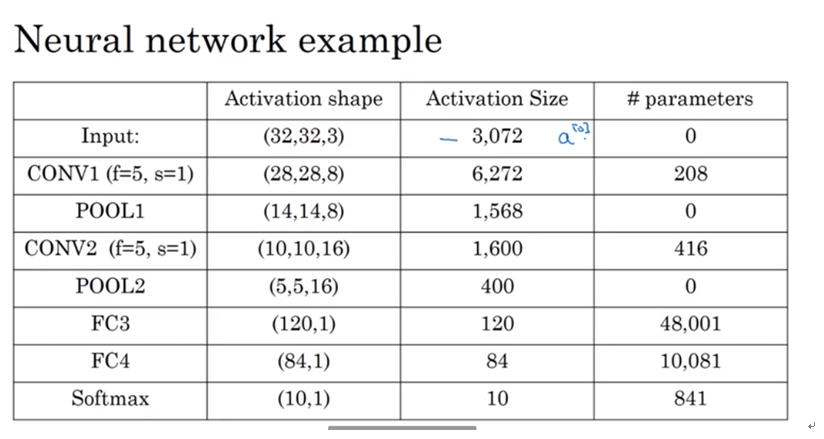
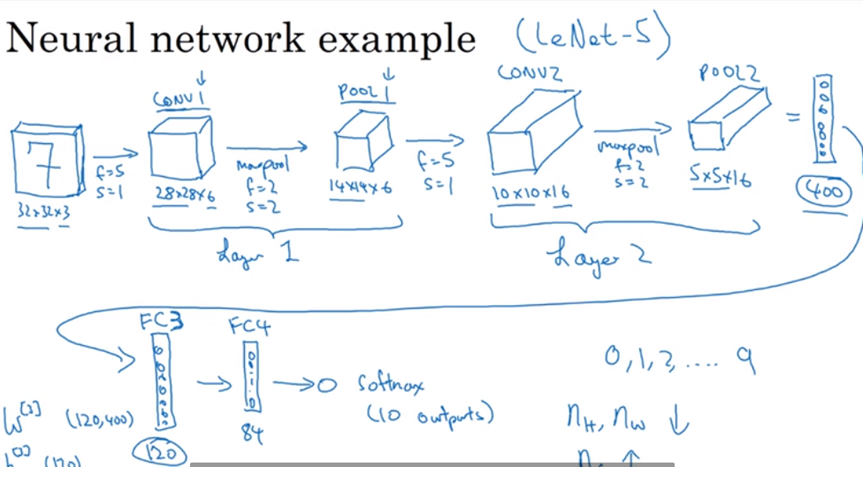
参数=filter_size*filter_size+bias || Activation size(L-1)*Actication size(L)+bias 偏置一般就是1
