

现代计算机图形学——P3. Transformation-2D
- P3. Transformation
- P3. Transformation
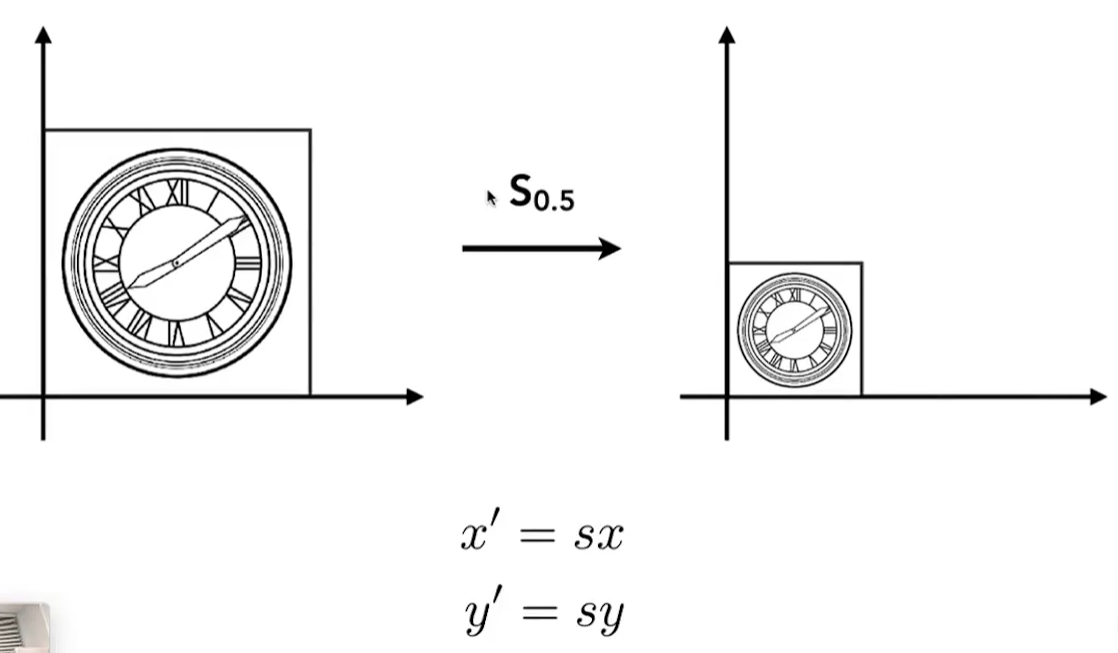
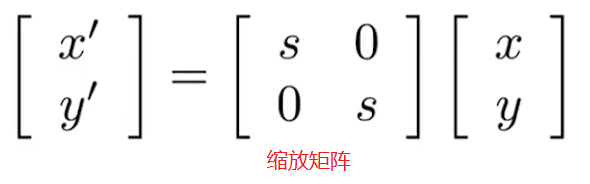
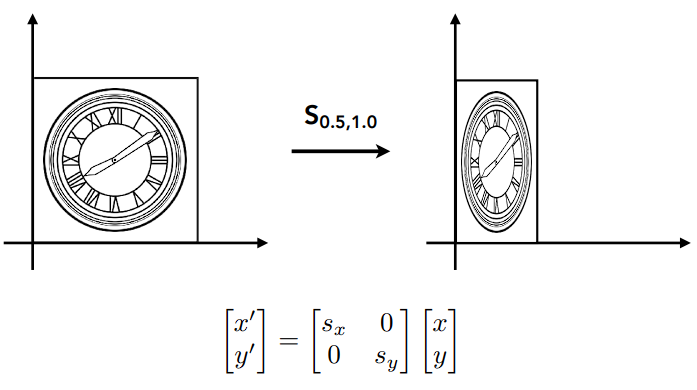
矩阵和变换联系起来
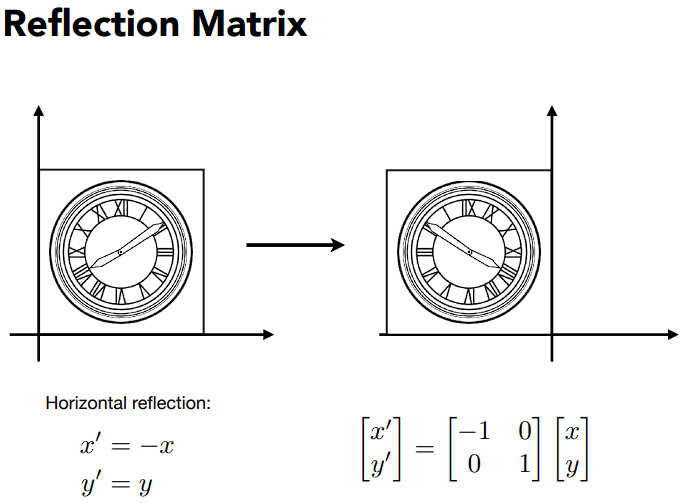
Reflection Matrix(反射矩阵(名字不重要)):
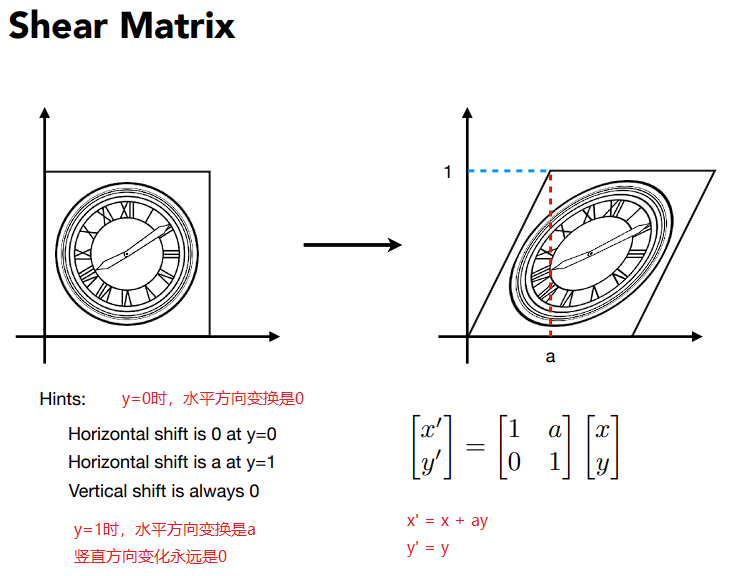
切变:
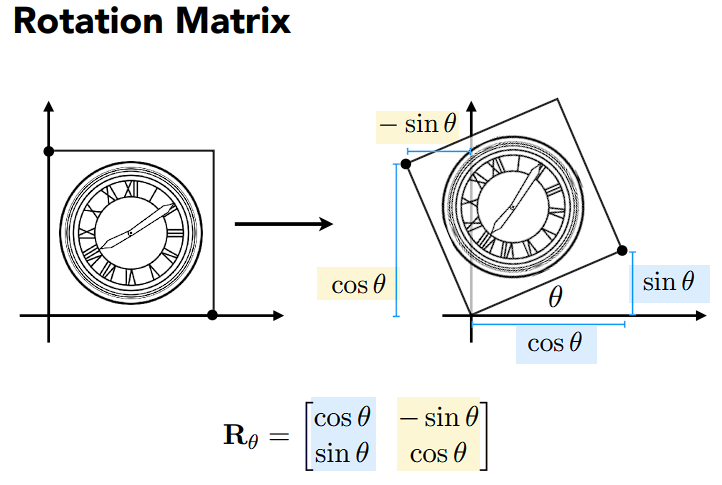
旋转:
推导:
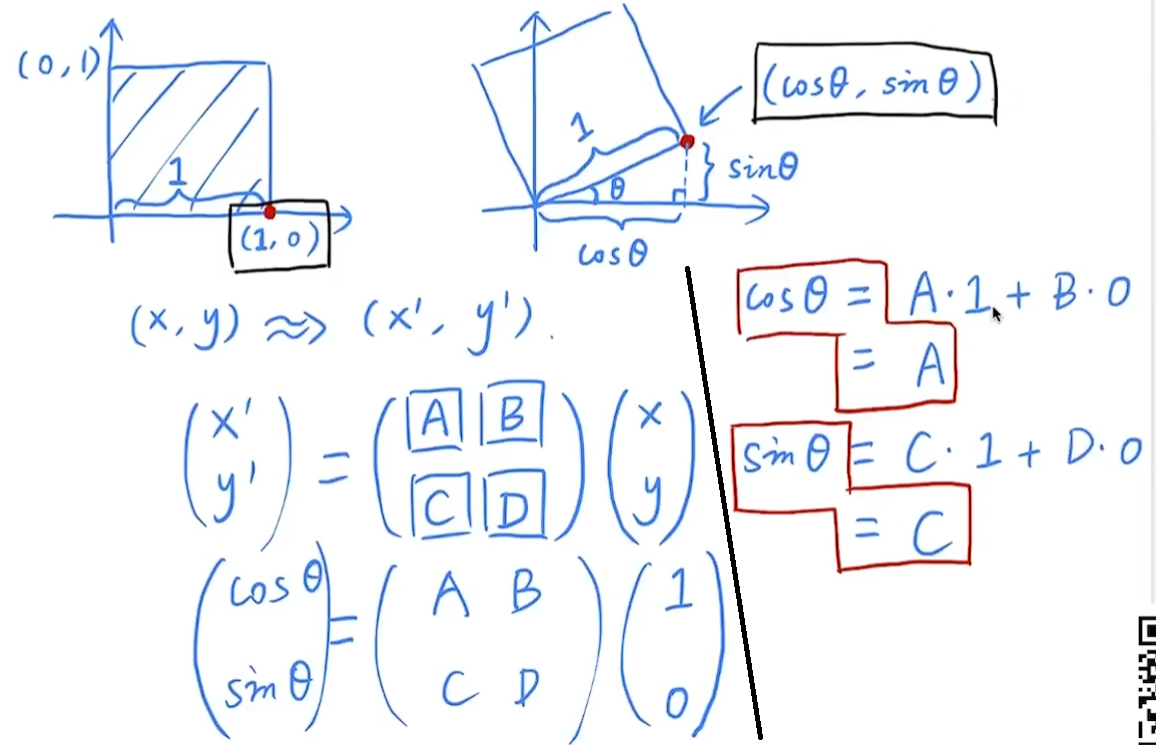 旋转矩阵中的B和D可以用(0,1)这个点来推算
旋转矩阵中的B和D可以用(0,1)这个点来推算
线性变换:
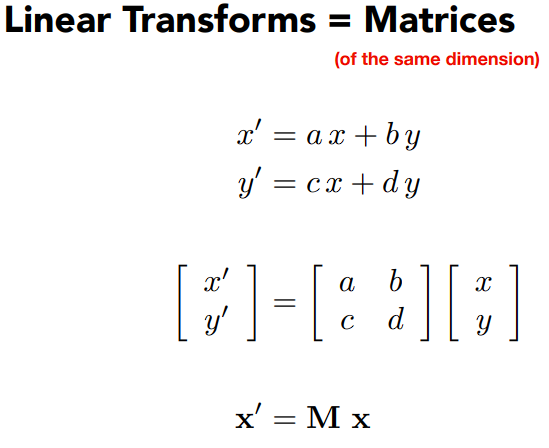 (先不管这个M)
(先不管这个M)
齐次坐标
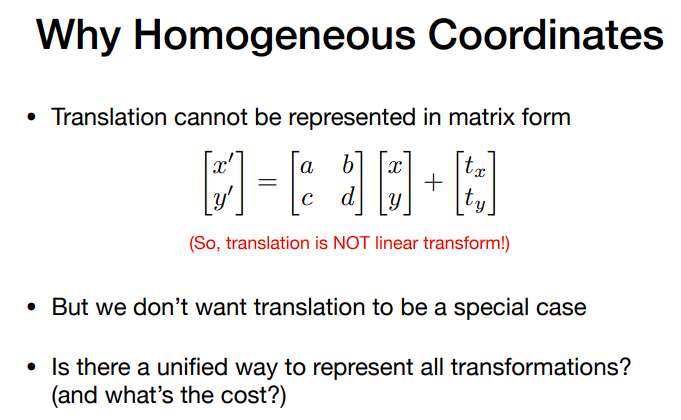
为什么要用齐次坐标:
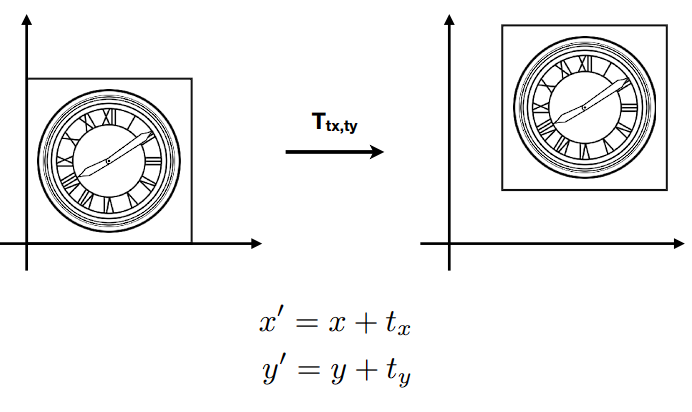
平移变换不能用线性变换(矩阵乘向量)表示
平移变换用线性变换表示的解决方法:齐次坐标(增加一个维度;齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示)
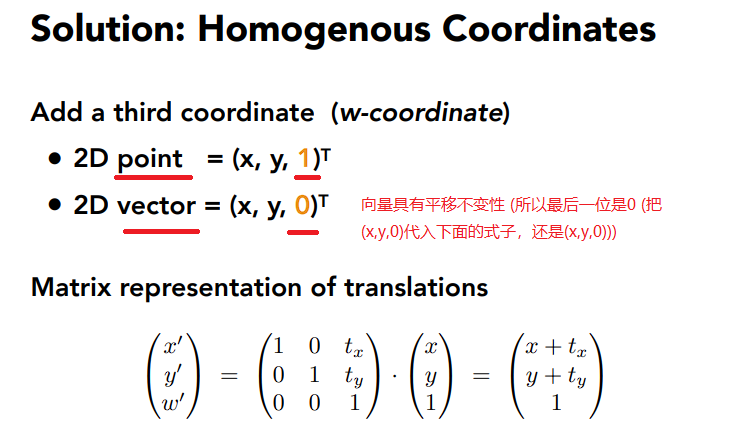
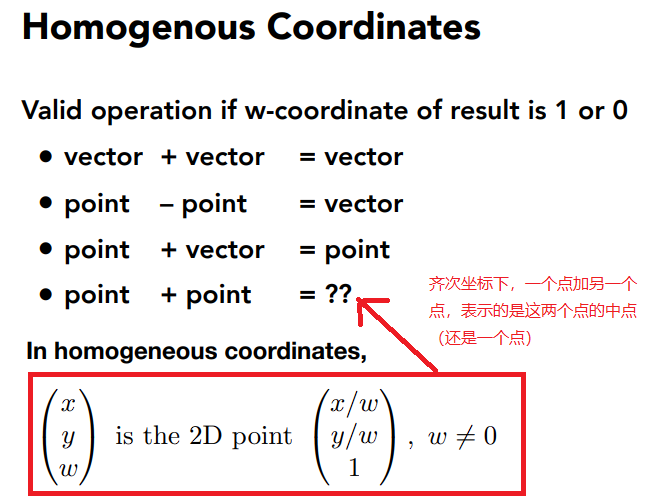
引用齐次坐标的目的:把所有变化都写成一个矩阵乘一个向量的形式
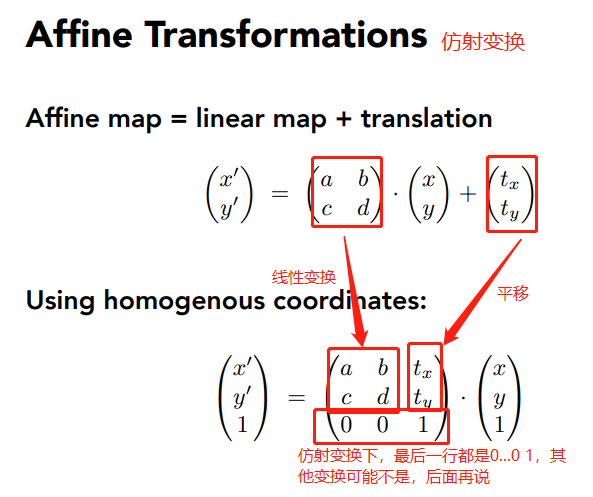 (上面是先线性变换,再平移,下面齐次坐标也是)
(上面是先线性变换,再平移,下面齐次坐标也是)
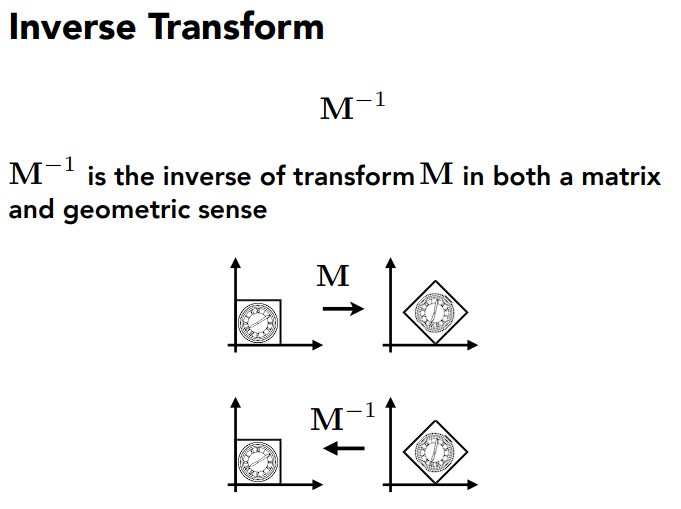
逆变换:
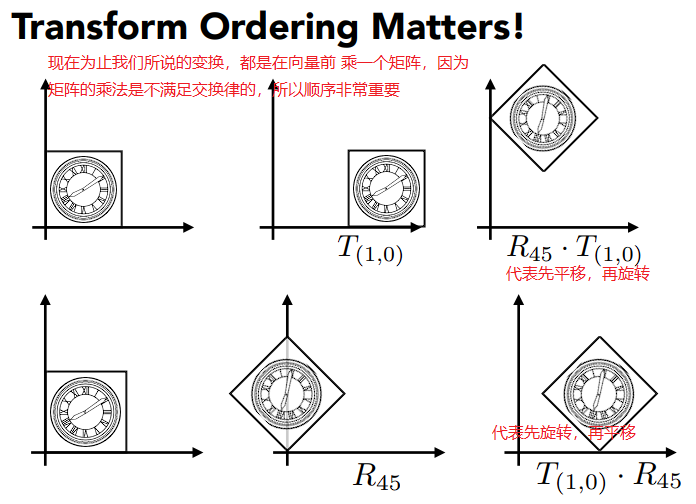
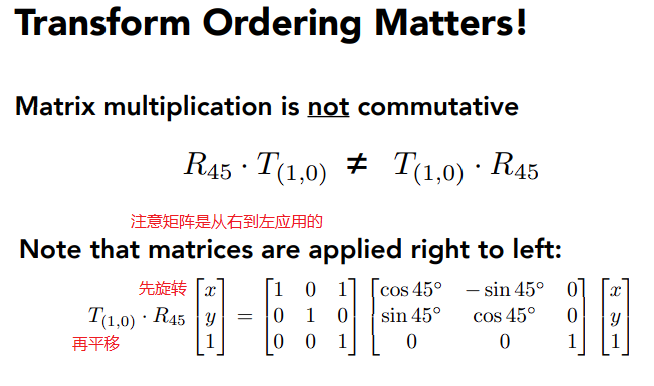
矩阵变换的顺序应该从右到左写
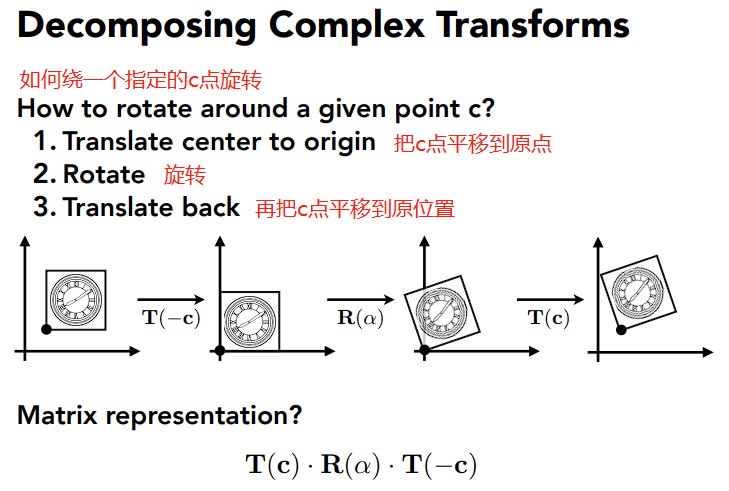
变换的分解:
(旋转默认是以原点为中心,逆时针旋转)
(下节课开个头)
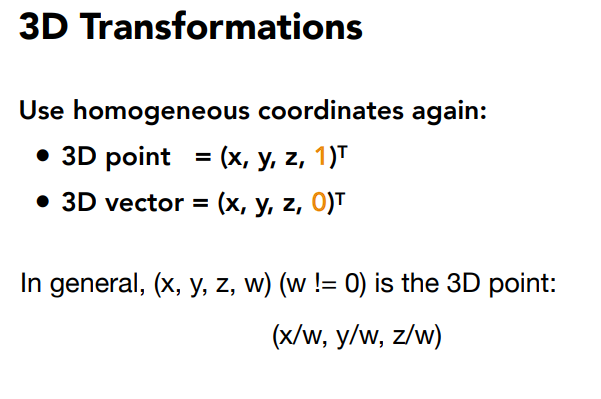
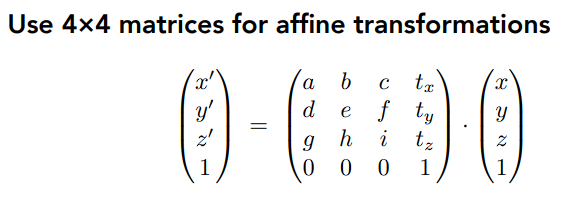
三维空间的变换
三维空间的齐次坐标
(〃>_<;〃)(〃>_<;〃)(〃>_<;〃)


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· winform 绘制太阳,地球,月球 运作规律
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· 写一个简单的SQL生成工具
· AI 智能体引爆开源社区「GitHub 热点速览」