
(转载)深度学习基础(1)——感知器
原文地址:https://zybuluo.com/hanbingtao/note/581764
转载在此的目的是自己做个笔记,日后好复习,如侵权请联系我!!
深度学习是什么?
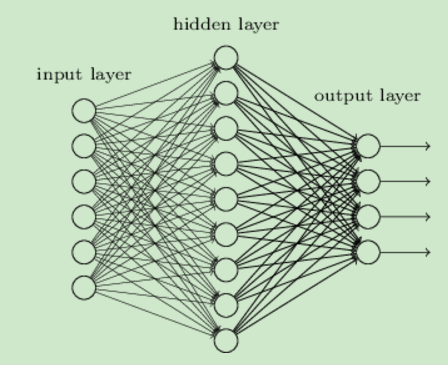
在人工智能领域,有一个方法叫机器学习。在机器学习这个方法里,有一类算法叫神经网络。神经网络如下图所示:
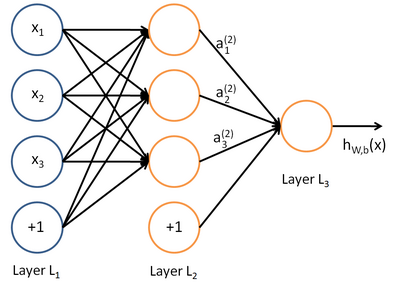
上图的每个圆圈都是一个神经元,每条线表示神经元之间的连接。我们可以看到,上面的神经元被分成了多层,层与层之间的神经元有连接,而层内之间的神经元没有连接。最左边的层叫输入层,这层负责接收输入数据;最右边的层叫做输出层,我们可以从这层获取神经网络输出数据。输入层和输出层之间的层叫做隐藏层。
隐藏层比较多(大于2)的神经网络叫做深度神经网络。而深度学习,就是使用深度架构(比如,深度神经网络)的机器学习方法。
那么深层网络和浅层网络相比有什么优势呢?简单来说深度网络能够表达力更强。事实上,一个仅有一个隐藏层的神经网络就能拟合任何一个函数,但是它需要很多很多的神经元。而深层网络用少得多的神经元就能拟合同样的函数。也就是为了拟合一个函数,要么使用一个浅而宽的网络,要么使用一个深而窄的网络。而后者往往更节约资源。
深层网络也有劣势,就是它不太容易训练。简单地说,你需要大量的数据,很多的技巧才能训练好一个深层网络。这是个手艺活。
感知器
下图是一个感知器:
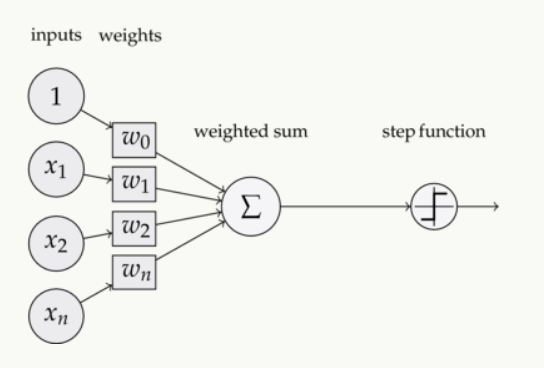
可以看到,一个感知器有如下组成部分:

例子:用感知器实现and函数
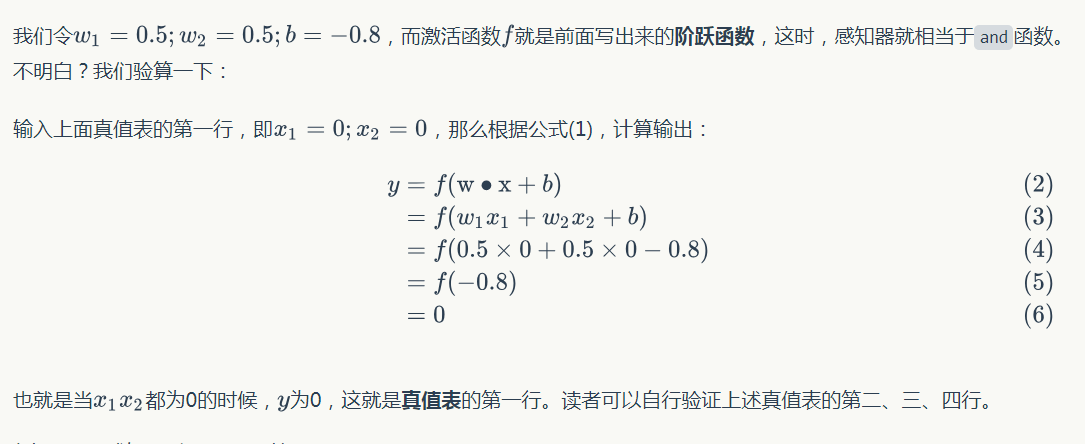
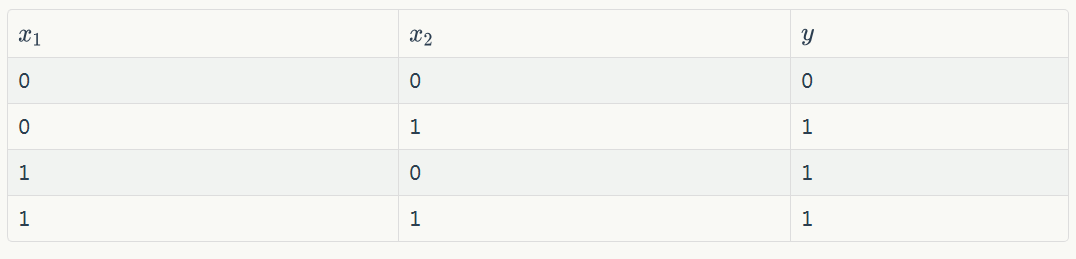
我们设计一个感知器,让它来实现and运算。程序员都知道,and是一个二元函数(带有两个参数x1和x2),下面是它的真值表:
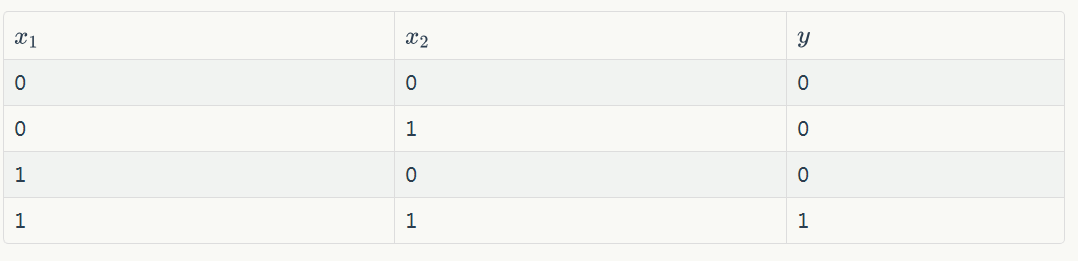
为了计算方便,我们用0表示false,用1表示true。
例子:用感知器实现or函数
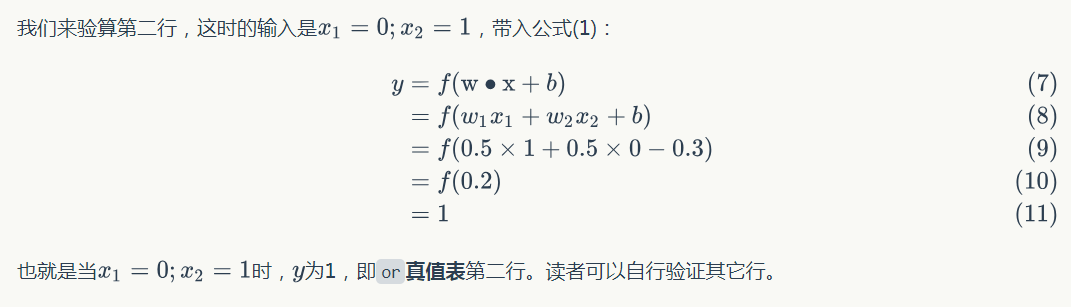
同样,我们也可以用感知器来实现or运算,仅仅需要把偏置项b的值设置为-0.3就可以了。我们验算一下,下面是or运算的真值表:
感知器还能做什么?
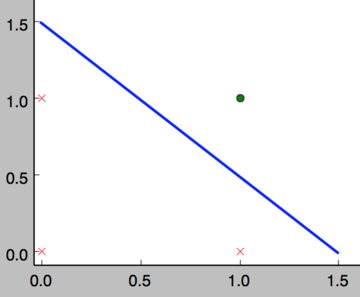
事实上,感知器不仅仅能实现简单的布尔运算。它可以拟合任何的线性函数,任何线性分类或线性回归问题都可以用感知器来解决。前面的布尔运算可以看作是二分类问题,即给定一个输入,输出0(属于分类0)或1(属于分类1)。如下面所示,and运算是一个线性分类问题,即可以用一条直线把分类0(false,红叉表示)和分类1(true,绿点表示)分开。
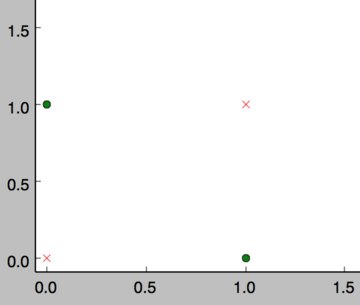
然而,感知器却不能实现异或运算,如下图所示,异或运算不是线性的,你无法用一条直线把分类0和分类1分开。
感知器的训练
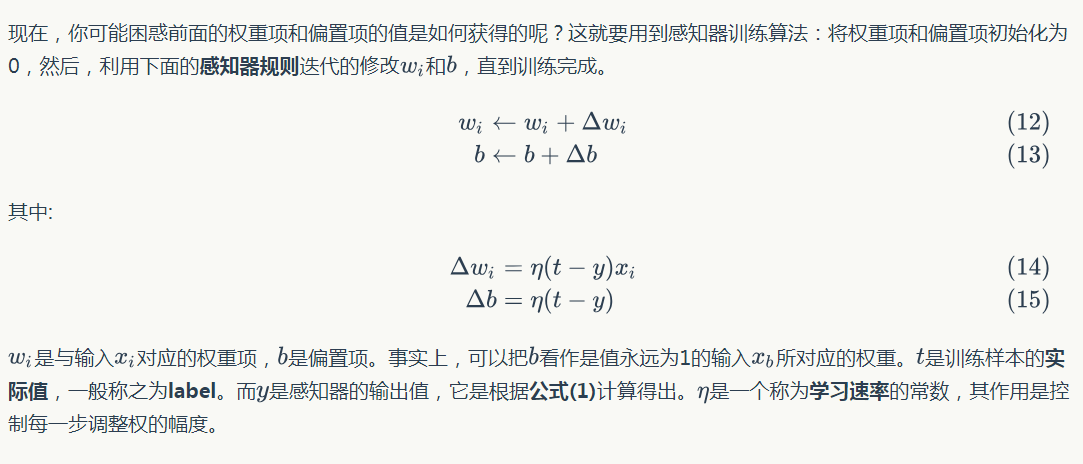
每次从训练数据中取出一个样本的输入向量x,使用感知器计算其输出y,再根据上面的规则来调整权重。每处理一个样本就调整一次权重。经过多轮迭代后(即全部的训练数据被反复处理多轮),就可以训练处感知器的权重了,使之实现目标函数。
从感知器到神经网络
从上面的知识我们知道,感知器是一个有若干输入和一个输出的模型,如下图:

输出和输入之间学习到一个线性关系,得到中间输出结果:

接着是一个神经元激活函数:
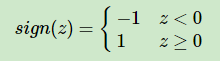
从而得到我们想要的输出结果 1 或者 -1 。
这个模型只能用于二元分类,且无法学习比较复杂的非线性模型,因此在工业界无法使用。
而神经网络则在感知机的模型上做了扩展,总结主要有三点:
(1) 加入了隐藏层,隐藏层可以有多层,增强模型的表达能力,如下图所示,当然增加了这么多隐藏层模型的复杂度也增加了好多。

(2)输出层的神经元也可以不止一个输出,可以有多个输出,这样模型可以灵活地应用于分类回归,以及其他的机器学习领域比如降维和聚类等。多个神经元输出的输出层对应的一个实例如下图,输出层现在有4个神经元了。
(3)对激活函数做扩展,感知器的激活函数是 sign (z) ,虽然简单但是处理能力有限,因此神经网络中一般使用其他的激活函数,比如我们在逻辑回归里面使用过的Sigmoid 函数,即:
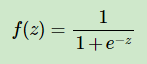
还有后来出现的 tanx,softmax,Relu等,通过使用不同的激活函数,神经网络的表达能力进一步增强。
编程实战:实现感知器
完整代码实现请参考:
# -*- coding: UTF-8 -*-
class Perceptron(object):
def __init__(self, input_num, activator):
'''
初始化感知器,设置输入参数的个数,以及激活函数。
激活函数的类型为double -> double
'''
self.activator = activator
# 权重向量初始化为0
self.weights = [0.0 for _ in range(input_num)]
# 偏置项初始化为0
self.bias = 0.0
def __str__(self):
'''
打印学习到的权重、偏置项
'''
return 'weights\t:%s\nbias\t:%f\n' % (self.weights, self.bias)
def predict(self, input_vec):
'''
输入向量,输出感知器的计算结果
'''
# 把input_vec[x1,x2,x3...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用map函数计算[x1*w1, x2*w2, x3*w3]
# 最后利用reduce求和
return self.activator(
reduce(lambda a, b: a + b,
map(lambda (x, w): x * w,
zip(input_vec, self.weights))
, 0.0) + self.bias)
def train(self, input_vecs, labels, iteration, rate):
'''
输入训练数据:一组向量、与每个向量对应的label;以及训练轮数、学习率
'''
for i in range(iteration):
self._one_iteration(input_vecs, labels, rate)
def _one_iteration(self, input_vecs, labels, rate):
'''
一次迭代,把所有的训练数据过一遍
'''
# 把输入和输出打包在一起,成为样本的列表[(input_vec, label), ...]
# 而每个训练样本是(input_vec, label)
samples = zip(input_vecs, labels)
# 对每个样本,按照感知器规则更新权重
for (input_vec, label) in samples:
# 计算感知器在当前权重下的输出
output = self.predict(input_vec)
# 更新权重
self._update_weights(input_vec, output, label, rate)
def _update_weights(self, input_vec, output, label, rate):
'''
按照感知器规则更新权重
'''
# 把input_vec[x1,x2,x3,...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用感知器规则更新权重
delta = label - output
self.weights = map(
lambda (x, w): w + rate * delta * x,
zip(input_vec, self.weights))
# 更新bias
self.bias += rate * delta
def f(x):
'''
定义激活函数f
'''
return 1 if x > 0 else 0
def get_training_dataset():
'''
基于and真值表构建训练数据
'''
# 构建训练数据
# 输入向量列表
input_vecs = [[1,1], [0,0], [1,0], [0,1]]
# 期望的输出列表,注意要与输入一一对应
# [1,1] -> 1, [0,0] -> 0, [1,0] -> 0, [0,1] -> 0
labels = [1, 0, 0, 0]
return input_vecs, labels
def train_and_perceptron():
'''
使用and真值表训练感知器
'''
# 创建感知器,输入参数个数为2(因为and是二元函数),激活函数为f
p = Perceptron(2, f)
# 训练,迭代10轮, 学习速率为0.1
input_vecs, labels = get_training_dataset()
p.train(input_vecs, labels, 10, 0.1)
#返回训练好的感知器
return p
if __name__ == '__main__':
# 训练and感知器
and_perception = train_and_perceptron()
# 打印训练获得的权重
print and_perception
# 测试
print '1 and 1 = %d' % and_perception.predict([1, 1])
print '0 and 0 = %d' % and_perception.predict([0, 0])
print '1 and 0 = %d' % and_perception.predict([1, 0])
print '0 and 1 = %d' % and_perception.predict([0, 1])
对于程序员来说,没有什么比亲自动手实现学得更快了,而且,很多时候一行代码抵得上千言万语。接下来我们就将实现一个感知器。
下面是一些说明:
- 使用python语言。python在机器学习领域用的很广泛,而且,写python程序真的很轻松。
- 面向对象编程。面向对象是特别好的管理复杂度的工具,应对复杂问题时,用面向对象设计方法很容易将复杂问题拆解为多个简单问题,从而解救我们的大脑。
- 没有使用numpy。numpy实现了很多基础算法,对于实现机器学习算法来说是个必备的工具。但为了降低读者理解的难度,下面的代码只用到了基本的python(省去您去学习numpy的时间)。
下面是感知器类的实现,非常简单。去掉注释只有27行,而且还包括为了美观(每行不超过60个字符)而增加的很多换行。
class Perceptron(object):
def __init__(self, input_num, activator):
'''
初始化感知器,设置输入参数的个数,以及激活函数。
激活函数的类型为double -> double
'''
self.activator = activator
# 权重向量初始化为0
self.weights = [0.0 for _ in range(input_num)]
# 偏置项初始化为0
self.bias = 0.0
def __str__(self):
'''
打印学习到的权重、偏置项
'''
return 'weights\t:%s\nbias\t:%f\n' % (self.weights, self.bias)
def predict(self, input_vec):
'''
输入向量,输出感知器的计算结果
'''
# 把input_vec[x1,x2,x3...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用map函数计算[x1*w1, x2*w2, x3*w3]
# 最后利用reduce求和
return self.activator(
reduce(lambda a, b: a + b,
map(lambda (x, w): x * w,
zip(input_vec, self.weights))
, 0.0) + self.bias)
def train(self, input_vecs, labels, iteration, rate):
'''
输入训练数据:一组向量、与每个向量对应的label;以及训练轮数、学习率
'''
for i in range(iteration):
self._one_iteration(input_vecs, labels, rate)
def _one_iteration(self, input_vecs, labels, rate):
'''
一次迭代,把所有的训练数据过一遍
'''
# 把输入和输出打包在一起,成为样本的列表[(input_vec, label), ...]
# 而每个训练样本是(input_vec, label)
samples = zip(input_vecs, labels)
# 对每个样本,按照感知器规则更新权重
for (input_vec, label) in samples:
# 计算感知器在当前权重下的输出
output = self.predict(input_vec)
# 更新权重
self._update_weights(input_vec, output, label, rate)
def _update_weights(self, input_vec, output, label, rate):
'''
按照感知器规则更新权重
'''
# 把input_vec[x1,x2,x3,...]和weights[w1,w2,w3,...]打包在一起
# 变成[(x1,w1),(x2,w2),(x3,w3),...]
# 然后利用感知器规则更新权重
delta = label - output
self.weights = map(
lambda (x, w): w + rate * delta * x,
zip(input_vec, self.weights))
# 更新bias
self.bias += rate * delta
接下来,我们利用这个感知器类去实现and函数。
def f(x):
'''
定义激活函数f
'''
return 1 if x > 0 else 0
def get_training_dataset():
'''
基于and真值表构建训练数据
'''
# 构建训练数据
# 输入向量列表
input_vecs = [[1,1], [0,0], [1,0], [0,1]]
# 期望的输出列表,注意要与输入一一对应
# [1,1] -> 1, [0,0] -> 0, [1,0] -> 0, [0,1] -> 0
labels = [1, 0, 0, 0]
return input_vecs, labels
def train_and_perceptron():
'''
使用and真值表训练感知器
'''
# 创建感知器,输入参数个数为2(因为and是二元函数),激活函数为f
p = Perceptron(2, f)
# 训练,迭代10轮, 学习速率为0.1
input_vecs, labels = get_training_dataset()
p.train(input_vecs, labels, 10, 0.1)
#返回训练好的感知器
return p
if __name__ == '__main__':
# 训练and感知器
and_perception = train_and_perceptron()
# 打印训练获得的权重
print and_perception
# 测试
print '1 and 1 = %d' % and_perception.predict([1, 1])
print '0 and 0 = %d' % and_perception.predict([0, 0])
print '1 and 0 = %d' % and_perception.predict([1, 0])
print '0 and 1 = %d' % and_perception.predict([0, 1])
将上述程序保存为perceptron.py文件,通过命令行执行这个程序,其运行结果为:
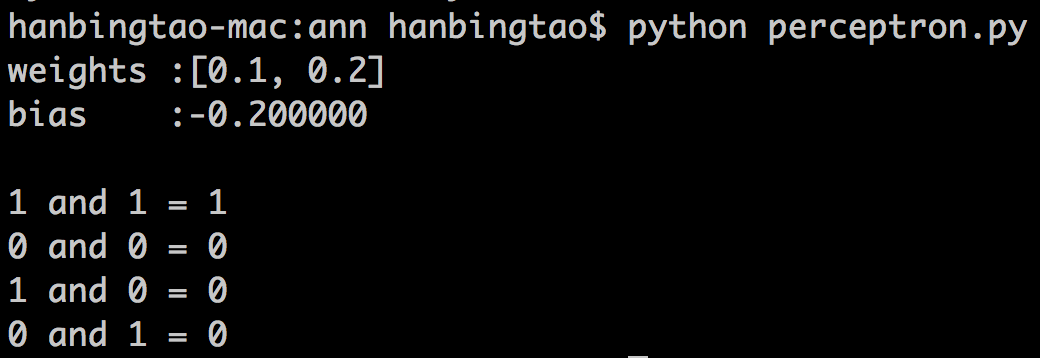
怎么样,感知器竟然完全实现了and函数,大家可以尝试一下利用感知器去实现其它函数。
小结
终于看(写)到小结了...,大家都累了。对于零基础的你来说,走到这里应该已经很烧脑了吧。没关系,休息一下。值得高兴的是,你终于已经走出了深度学习入门的第一步,这是巨大的进步;坏消息是,这仅仅是最简单的部分,后面还有无数艰难险阻等着你。不过,你学的困难往往意味着别人学的也困难,掌握一门高门槛的技艺,进可糊口退可装逼,是很值得的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号