
VS2012编译PCL1.70的过程
关于个人的几个注意事项:
对于boost,可以使用vc100的库,来编译VC110的代码;
对于确实的包含,一个一个添加,要耐心等待!!!原文链接:http://blog.csdn.net/silangquan/article/details/953308
PCL简介
PCL是Point Cloud Library的缩写,是一个用于处理二维图像,三维深度图像和三维点云的C++库。该库是完全开源的,可免费用于商业和学术研究。
官方网站:http://pointclouds.org/
PCL的用途:
下面对最新版的PCL库进行 编译。
环境:windows7 32bit
VS2010
cmake2.8
TortoiseSVN 1.8
1.安装第三方依赖库
官网上已经给出了一些安装包。下载地址:http://pointclouds.org/downloads/windows.html
记住下好对应系统的安装包。
Eigen无法正常下载,需要去官网下载:http://eigen.tuxfamily.org/index.php?title=Main_Page
我下载的实3.1.3的版本,下载zip包,直接解压到C:\Program Files\,把文件夹名字改成eigen。
其他的三方库直接双击安装就可以了。
2.用cmake构建项目
创建
C:\Program Files\PCL
C:\Program Files\PCL\trunk
然后用TortoiseSVN把pcl的源码down下来,svn地址是: http://svn.pointclouds.org/pcl/trunk
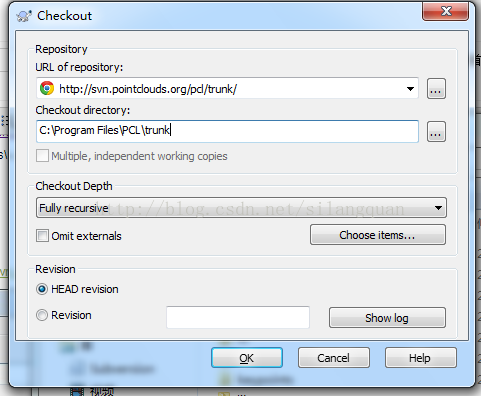
打开cmake,开始构建。
将trunk文件夹下的CMakeLists.txt托到cmake里,先Configure,选择Visual Studio 10,然后Generate。
正常的话应该是这样:
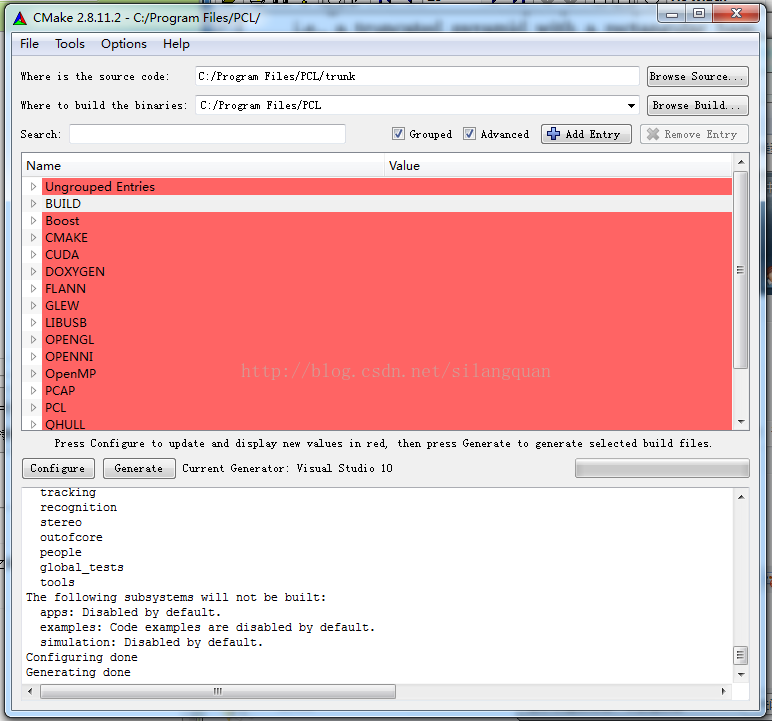
有问题的话根据报错信息进行修改,大部分是第三方依赖库没有装好。
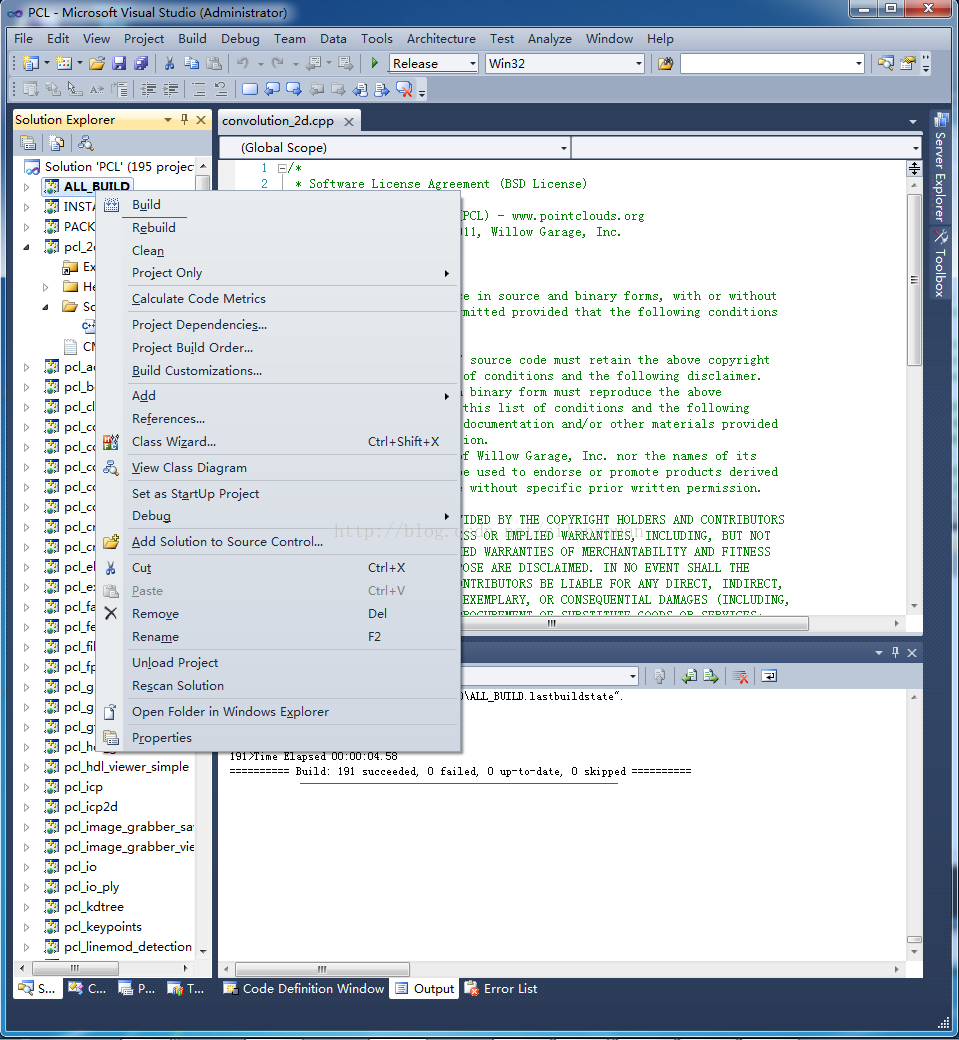
双击PCL.sln导入工程到VS2010,编译,发现全是error - -
boost库很多东西都没找到.
在网上搜了很久,发现问题是CMakeLists没写好.1.50版本的Boost库没办法识别.
最快的解决方法:卸载BOOST1.50,去http://ftp.jaist.ac.jp/pub//sourceforge/p/po/pointclouds/dependencies/ 下载Boost-1.49.0-vs2010-x86.exe安装后重复上面的步骤,生成的项目就正确了。
Build一下ALL_BUILD, 然后去打个盹,回来发现报错:
Error 18326 error C2664: 'std::_Tree_const_iterator<_Mytree>::_Tree_const_iterator(const std::_Tree_const_iterator<_Mytree> &)' : cannot convert parameter 1 from 'std::_Tree_const_iterator<_Mytree>' to 'const std::_Tree_const_iterator<_Mytree> &' D:\VS2010\VC\include\utility 163
坑爹 的~
继续搜索解决方法....
修改一个位置: trunk/recognition/src/ransac_based/obj_rec_ransac.cpp
540: pair<set<ordered_int_pair>::iterator, bool> res = ordered_hypotheses_ids.insert (id_pair);
->540: pair<set<ordered_int_pair, bool(*)(const ordered_int_pair&, const ordered_int_pair&)>::iterator, bool> res = ordered_hypotheses_ids.insert (id_pair);
再次重新cmake->导入工程->build ALL_Build
注意debug和realse版本都要编译一遍,而且要全部编译通过.
然后再把INSALL编译一下,debug和realse版本都要编译一遍.
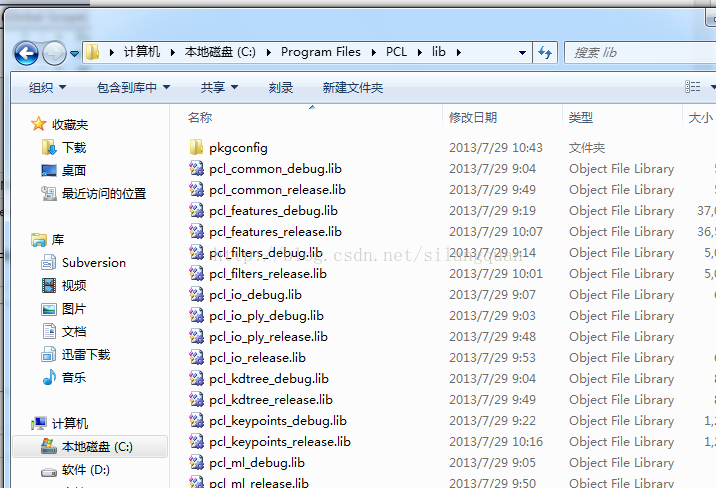
完全编译完成之后,C:\Program Files\PCL\lib中就有生成了编译好的lib库了 .
当然还可以自己去编译 一下它给的一些test,不过需要自己编译GTest库.
这样,PCL就 算编译好了.
如何在Windows环境中搭建PCL—Point Cloud Library开发环境
原文链接:http://shitou7630.blog.163.com/blog/static/3269953620126176843621/
如何快速构建PCL应用程序
使用CMake
- 编写PCL代码 包含PCL的头文件,使用PCL的函数和数据结构构建简易的界面实现可示化。
- 运行CMake_GUI
直接使用Configure与Generate工具,你可以在界面上找到相应的按钮。
- 行Visual Studio 调试程序
在使用CMake编译完成之后就生成了一个 Visual Studio 2010解决方案当中有三个项目,其中两个是辅助工程。
- 注意事项
使用Visual Studio
- 路径构建
- 库文件查找
- 调试运行
- 改正错误
库文件与动态库的配置
- 活页夹
- Windows寻址方式
代码剖析
PCL_Write
头文件包含:iostream,pcd_io.h,point_type.h
数据类型: pcl父类,PointCloud模板类,PointXYZRGB点数据类。。。。细节处理:
- 初始化点云结构
pcl::PointCloud cloud;
按照对应的数据要求填充cloud数据,像width,height,is_dense(是否稠密),通过resize函数应用相应的参数对数据进行更新。
cloud是一个PointCloud数据模板,可以通过更新其x,y,z,rgb属性来更新殿云数据
- 数据文件输出
最后用户通过pcl的io接口中的savePCDFileASCII将数据以ASCII码的形式存储在pcd文件中
cloud_Viewer
这是一个查看有PCL_writer保存的pcd数据的Console程序从头文件中我们就可以看到许多都包含了可视化的元素,如visualization/cloud_viwer.h,pcl/io/io.h,pcl/io/pcd_io.h
pcl::visualization::PCLVisualizer pcl::PointCloud::Ptr pcl::io::loadPCDFile(string name, PointXYZRGB *cloud) pcl::visualization::CloudViewer showCloud(PointXYZRGB *cloud)方法 runOnVisualizationThread( void function() )

