
SLAM: 图像角点检测的Fast算法(OpenCV文档)
原文链接:http://blog.csdn.net/candycat1992/article/details/22285979
本文做了少量修改,并添加了C++代码,若有疑问或者版权问题,请拜读作者或者通知本人。
目标
- 理解FAST算法的基本原理
- 使用OpenCV的FAST函数进行角点(corners)检测
原理
我们已知很多种特征检测的方法,而且它们其中很多效果都非常不错。但是,当从一个实时运行的程序角度出发,它们还不够快。一个最好的例子就是SLAM(Simultaneous Localization and Mapping)移动机器人,它的可计算资源是受限的。
作为上述问题的一个解决方法,FAST(Features from Accelerated Segment Test)算法由Edward Rosten 和 Tom Drummond在他们2006年的论文“Machine
learning for high-speed corner detection”(在2010年再次被修订)中被提出。下面是该算法的一个基本总结。你可以参见原论文去学习更多的细节(下面所有的图片是从原论文中提取的)。
使用FAST进行特征检测
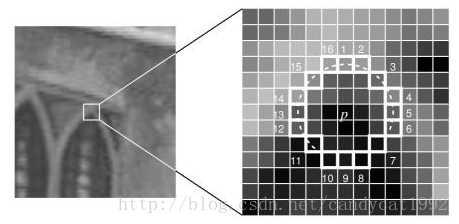
- 从图片中选取一个像素点Pi,下面我们将判断它是否是一个特征点。我们首先把它的密度(即像素值)设为I_p。
- 设定一个合适的阙值T。
- 考虑该像素点周围的16个像素。(见下图)
- 现在,如果在这个大小为16个像素的圆上有n 个连续的像素点,它们的像素值要么都比I_p+T大,要么都比I_p-T小,那么它就是一个角点。(如上图中白色虚线所示)。n 这里被设定为12。
- 我们现在应该提出一个高效的测试,来快速排除一大部分是非角点的点。该测试仅仅检查在位置1、9、5和13四个位置的像素(首先检查1和9,看它们是否亮于或暗于阙值。如果是,再检查5和13)。如果Pi是一个角点,那么上述四个像素点中至少有3个应该必须都大于I_p +T 或者小于I_p-
T(因为若是一个角点,超过四分之三个圆的部分应该满足判断条件,半圆比包含上述某三个点)。如果都不满足,那么Pi 不可能是一个角点。完整的分段测试可以被用于接受的所有候选点,通过检测圆上的所有点。这种检测有很好的性能,但是有一些缺点:
1. 当n < 12时不能拒绝许多候选点。
2. 检测出来的角点不是最优的,这是因为它的效率是依靠角点外形的排列和分布的。
3.
4. 相邻的多个特征点会被检测到。
前三个问题可以使用机器学习的方法解决。最后一个可以使用non-maximal
suppression。
机器学习
- 选择一个图片集合进行学习(最好是来自于目标应用定义域)。
- 在每一张图上运行FAST算法,找到特征点。
- 对于每个特征点,存储它周围的16个像素点到一个vector中。为所有的图片做同样的事,得到它们所有特征点的vector P。
- 这16个像素中的每一个像素(假设为x),可以有下面三种状态中的一种:
- 依靠这些状态,特征向量P被划分为3个子集,P_d,P_s,P_b。
- 定义一个新的布尔变量,K_p。如果P是一个角点,那些K_p为真;否则为假。
- 使用ID3算法(决策树分类器)来查询每一个子集。
- 递归计算所有的子集直到它的嫡为0。
- 被创建的决策树就被用于其他图片的fast检测。

non-maximal suppression
从邻近的位置选取了多个特征点是另一个问题。我们可以使用non-maximal
suppression来解决。
- 为每一个检测到的特征点计算它的分数函数(score function),V。V是 P 和它周围16个像素点的绝对偏差的和。
- 考虑两个相邻的特征点,并比较它们的v值。
- v 值较低的点将会被剔除。
总结
FAST算法比其他已知的角点检测法要快很多倍。
但是当图片的噪点较多时,它的健壮性并不好。这依靠一个阙值。
OpenCV中的FAST特征检测
和OpenCV中其他特征检测器的调用相同。如果你想,你可以指定一个阙值,或者决定是否使用non-maximal suppression来判断邻近特征点。
对于相邻特征点,OpenCV定义了三个flags:
- cv2.FAST_FEATURE_DETECTOR_TYPE_5_8
- cv2.FAST_FEATURE_DETECTOR_TYPE_7_12
- cv2.FAST_FEATURE_DETECTOR_TYPE_9_16
下面是一个简单的示例代码(Python)。
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('simple.jpg',0)
# Initiate FAST object with default values
fast = cv2.FastFeatureDetector()
# find and draw the keypoints
kp = fast.detect(img,None)
img2 = cv2.drawKeypoints(img, kp, color=(255,0,0))
# Print all default params
print "Threshold: ", fast.getInt('threshold')
print "nonmaxSuppression: ", fast.getBool('nonmaxSuppression')
print "neighborhood: ", fast.getInt('type')
print "Total Keypoints with nonmaxSuppression: ", len(kp)
cv2.imwrite('fast_true.png',img2)
# Disable nonmaxSuppression
fast.setBool('nonmaxSuppression',0)
kp = fast.detect(img,None)
print "Total Keypoints without nonmaxSuppression: ", len(kp)
img3 = cv2.drawKeypoints(img, kp, color=(255,0,0))
cv2.imwrite('fast_false.png',img3) C++代码段:
int CEkfSlam::fast_corner_detect_9(
cv::Mat &im, double threshold, std::vector<CvPoint> &coords)
{
//提取快速角点//一次只提取一个角点?//且有时可能会不发现角点,可能一次有多个角点
cv::Mat image(im.rows, im.cols, 1);
if (3== im.channels() ){
cv::cvtColor (im,image,CV_BGR2GRAY);
}
else{
image =im.clone();
}
//快速角点检测
std::vector<cv::KeyPoint> keypoints;
cv::FAST(image,keypoints,threshold,true); //默认开启极大值抑制!
coords.resize(keypoints.size() );
//cv::imshow("kp",image);cv::waitKey(0);
for (int i=0;i< keypoints.size();++i){
coords[i].x =keypoints[i].pt.x;
coords[i].y =keypoints[i].pt.y;
}
return 1;
}值得注意的是,下面的写法会出现内存问题:
cv::FastFeatureDetector fast(threshold, true); fast.detect(image, allKeypoints[0]);</del>
下面是测试结果。左边是使用了nonmaxSuppression的FAST,右边则没有使用。

