三维重建PCL:点云单侧面正射投影
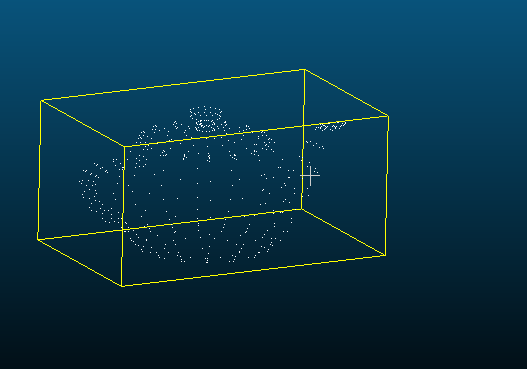
终于把点云单侧面投影正射投影的代码写完了,为一个阶段,主要使用平面插值方法,且只以XOY平面作为的正射投影面。有些凑合的地方,待改进。
方法思路:使用Mesh模型,对每一个表面进行表面重建。借助OpenCV Mat类型对投影平面进行内点判断,对内点位置进行插值。
OpenCV cv::polylines 和lines 进行画图的时候都会出现问题,因此在某些时刻无法使用连通域查找的方法进行内点检测,应该重写line方法。
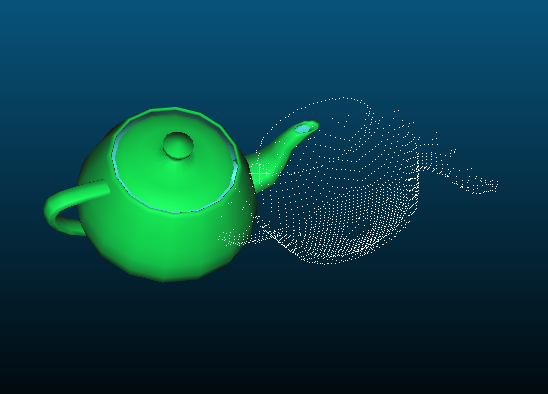
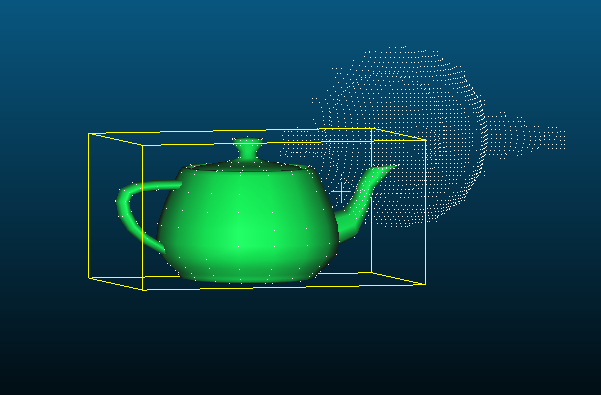
1.使用Mesh载入ply模型,和同步载入点云,也可以从mesh直接Copy点云。
pcl::PolygonMesh cloudMesh; pcl::io::loadPolygonFileOBJ(ViewPath, cloudMesh); pcl::fromPCLPointCloud2(cloudMesh.cloud, *cloud); ViewPath = "D:/DataSet/RGB_data/teapot.pcd"; pcl::io::savePCDFileASCII(ViewPath, *cloud);//一定要注意高和宽进行赋值 pcl::visualization::PCLVisualizer Viewer;//pcl::visualization::PCLVisualizer ViewerMesh; Viewer.addPolygonMesh(cloudMesh); int FrameX = 1000; int FrameY = 1000; int FrameZ = 1000; int Centroid = 0; int num = 12; float gap = 3.141592653/num; Eigen::Vector4f ViewPoint( 0.0, 0.0, 0.0, 1);//使用弧度 ViewPoint[0] = gap*i; cv::Mat imgGray = viewEx->getCloudViewByEdge( cloud, cloudView, cloudMesh, ViewPath, FrameX, FrameY, FrameZ, Centroid, ViewPoint);
2. 使用平面填充方法进行投影...
//使用多边形填充的方法进行投影
//获取点云侧面投影
//输入:点云的点集、边集
cv::Mat CViewExtract::getCloudViewByEdge(
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudView,
pcl::PolygonMesh &cloudMesh,
std::string ViewPath,
int FrameX, int FrameY, int FrameZ,
int Centroid,
Eigen::Vector4f &ViewPoint)
{
int BbxSize = FrameX;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudTrans(new pcl::PointCloud<pcl::PointXYZ>);
this->viewTrans(cloud, cloudTrans, ViewPoint);
//对点云进行侧面投影
std::vector<pcl::PointCloud<pcl::PointXYZ>> surfaces;
pcl::PointCloud<pcl::PointXYZ>::Ptr surface(new pcl::PointCloud<pcl::PointXYZ>);
//计算平面
genSurfaceFromVertices(cloudMesh.polygons, cloudTrans, surface);//由cloud替换cloudtrans,mesh只是一个索引
cv::Mat imgGray = getViewer(surface, cloudTrans, cloudView);
return imgGray;
}3. 子函数
视点变换
float CViewExtract::viewTrans(
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudSrc,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudTrans,
Eigen::Vector4f &AngleTrans)
{
//1. Trans the VIew...
float AngleA, AngleB, AngleC;//声明视角//初始化 作为原始角度
AngleA = AngleTrans[0];//49.0/pi;
AngleB = AngleTrans[1];//78.9/pi;
AngleC = AngleTrans[2];//34.8/pi;
int size = cloudSrc->points.size();
cloudTrans->resize(0);
cloudTrans->reserve(size);
//位姿识别角度变换矩阵/
Eigen::Matrix4f TransX, TransY, TransZ;
//初始化三个矩阵!变换!
TransX << 1, 0, 0, 0,
0, cos(AngleA), -sin(AngleA), 0,
0, sin(AngleA), cos(AngleA), 0,
0, 0, 0, 1;//
TransY << cos(AngleB), 0, sin(AngleB), 0,
0, 1, 0, 0,
-sin(AngleB), 0, cos(AngleB), 0,
0, 0, 0, 1;
TransZ << cos(AngleC), -sin(AngleC), 0, 0,
sin(AngleC), cos(AngleC), 0, 0,
0, 0, 1, 0,
0, 0, 0, 1;
//点云模型角度变换
Eigen::Vector4f Centroid;
Centroid << 0, 0, 0, 0;
//pcl::compute3DCentroid(*cloudSrc, Centroid);
for (int idx = 0; idx < cloudSrc->points.size(); ++idx){
Eigen::Vector4f PointSrc, PointDest;//维数一致!
PointSrc[0] = cloudSrc->points[idx].x - Centroid[0];
PointSrc[1] = cloudSrc->points[idx].y - Centroid[1];
PointSrc[2] = cloudSrc->points[idx].z - Centroid[2];
//PointSrc[3] = 1;
PointDest = (TransX*(TransY*(TransZ*PointSrc)));//创建矩阵无效!
//cloudSrc->points[idx].x = PointDest[0] + Centroid[0];
//cloudSrc->points[idx].y = PointDest[1] + Centroid[1];
//cloudSrc->points[idx].z = PointDest[2] + Centroid[2];
//cloudSrc->points[idx].rgb = cloudSrc->points[idx].rgb;
pcl::PointXYZ p;
p.x = PointDest[0] + Centroid[0];
p.y = PointDest[1] + Centroid[1];
p.z = PointDest[2] + Centroid[2];
//p.x *= 5; p.y *= 5; p.z *= 5;
cloudTrans->push_back(p);
//cloudTrans->points[idx].rgb = cloudSrc->points[idx].rgb;
}
return 1.0;
}重建表面
//仍然产生整数的空隙,应该把原始点云扩充到四个整数邻域//前N个为原始点云
int CViewExtract::genSurfaceFromVertices(std::vector< ::pcl::Vertices> &vertices,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::PointXYZ>::Ptr surfaces)
{
int size = vertices.size();
for ( int i = 0; i < size; ++i ){
pcl::PointCloud<pcl::PointXYZ>::Ptr
surface(new pcl::PointCloud<pcl::PointXYZ>);//(&surfaces[i]);//
genSurfaceFromVertices( vertices[i], cloud, surface, i);
for ( auto p : surface->points){
surfaces->points.push_back(p);
}
surface->clear();
}
return size;
}//从表面获取点云,对单个面获取点云
int CViewExtract::genSurfaceFromVertices(const pcl::Vertices &vertice,
const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::PointXYZ>::Ptr surface,
int idx)
{
int size = 0;
int nV = vertice.vertices.size();
pcl::PointCloud<pcl::PointXYZ>::Ptr Votex(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = 0; i < nV; ++i){
pcl::PointXYZ p(cloud->points[vertice.vertices[i]]);
Votex->points.push_back(p);
}
int bx, by, bz;
std::vector<std::pair<float, float> > minmax(3);
//findMinMax( cloud, minmax );
MathCal::findMinMax(Votex, minmax);
bx = ceil(minmax[0].second - minmax[0].first);
by = ceil(minmax[1].second - minmax[1].first);
bz = ceil(minmax[2].second - minmax[2].first);
//bx *= 10; by *= 10; bz *= 10;
//取平面上的点//以Z轴为正射方向
std::vector<cv::Point2f> vetexs(0);//生成顶点
int xmin = minmax[0].first;
int ymin = minmax[1].first;
int zmin = minmax[2].first;
for (int i = 0; i < vertice.vertices.size(); ++i){
int idx = vertice.vertices[i];
pcl::PointXYZ p = cloud->points[idx];
cv::Point2f p2 = cv::Point2f(p.x - xmin, p.y - ymin);
//p2.x *= 10;p2.y *= 10;
vetexs.push_back(p2);
}
//生成图像//使用OpenCV画出对应二维图片
cv::Mat img = cv::Mat::zeros(by + 1, bx + 1, CV_8UC3);
cv::Mat _lableImg;
std::vector<std::vector<cv::Point > > foreAreas;
//wishchin::findInliners2d( img, vetexs, _lableImg, foreAreas );
MathCal::findInliners2dNoCon(img, vetexs, _lableImg, foreAreas);
float zmean = 0;
if (foreAreas.size()>0)
{
size = foreAreas[0].size();
//获取平面方程//Ax + By + Cz + D
//std::vector<float> getPlaneParam(std::vector<cv::Point2f> vetexs);
std::vector<pcl::PointXYZ> VotexP;
for (int i = 0; i < vetexs.size(); ++i){
pcl::PointXYZ p(vetexs[i].x, vetexs[i].y, (cloud->points[vertice.vertices[i]].z - zmin));
VotexP.push_back(p);
zmean += cloud->points[vertice.vertices[i]].z;
}
zmean /= vetexs.size();
std::vector<float> abcd = MathCal::getPlaneParam(VotexP);
//从平面上取点
surface->points.resize(0);
float x, y, z;//Mat xy的方向与 PCL是相反的!!!
for (int i = 0; i < size; ++i){
x = foreAreas[0][i].x;
y = foreAreas[0][i].y;
//x = bx + 0 - x;
//y = by + 0 - y;
z = 0-(abcd[0] * x + abcd[1] * y + abcd[3]) / abcd[2];
pcl::PointXYZ p(x,y, z);
p.x += xmin; p.y += ymin; p.z += zmin;//移到原位
surface->points.push_back(p);
}
surface->height = 1;
surface->width = size;
}
return size;
}寻找多边形的内点//寻找多边形的内点//取整数点//只能取凸多边形
//通过判断各个边的左边右边来进行计算//通过计算在多边形的内侧外侧计算-有点慢
//不使用连通域查找//
int MathCal::findInliners2dNoCon(cv::Mat &img, std::vector<cv::Point2f> &vetexs,
cv::Mat &_lableImg, std::vector<std::vector<cv::Point > > &foreAreas)
{
int size = 0;
//获取多边形边集
std::vector<std::vector<cv::Point2f>> edges(0);
if (vetexs.size() > 2)
{
std::vector<cv::Point2f> edge(0);
edge.push_back(cv::Point2f(vetexs[vetexs.size() - 1]));
edge.push_back(cv::Point2f(vetexs[0]));
edges.push_back(edge);
for (int i = 1; i < vetexs.size(); ++i)
{
edge.resize(0);
edge.push_back(cv::Point2f(vetexs[i - 1]));
edge.push_back(cv::Point2f(vetexs[i]));
edges.push_back(edge);
}
}
//测试
//bool isIn =isInliner(cv::Point2f(2, 538), vetexs, edges);//true
//bool isIn = isInliner(cv::Point2f(476, 258), vetexs, edges);//false
//bool isIn = isInliner(cv::Point2f(704, 137), vetexs, edges);
//bool isIn = isInliner(cv::Point2f(6, 11), vetexs, edges);
//取多边形的质心
//从质心开始查找连通域//需要提前染色
std::vector<cv::Point2d> inliners;
cv::Point2d seed(-1, -1);
bool findseed = false;
std::vector<cv::Point > foreArea;
for (int i = 0; i < img.rows; ++i)
{
unsigned char *ptrm = img.ptr<unsigned char>(i);
for (int j = 0; j < img.cols; ++j)
{
int c = *ptrm;
bool isIn = false;
isIn = isInliner(cv::Point2f(j, i), vetexs, edges); //!!!!!出现错误!待调试!//出现了两个方向都奇异的直角三角形
if (isIn){
seed.x = j;
seed.y = i;
foreArea.push_back(seed);
}
++ptrm;
}
}
if (foreArea.size()>0){
foreAreas.push_back(foreArea);
}
size = foreAreas.size();
return size;
}获取平面方程
//获取平面方程//Ax + By + Cz + D
std::vector<float> MathCal::getPlaneParam(const std::vector<pcl::PointXYZ> &votexs)
{
std::vector<float> abcd;
if (votexs.size() < 3){
return abcd;
}
else
{//取前三个点计算平面
float x1, x2, x3, y1, y2, y3, z1, z2, z3;
x1 = votexs[0].x; x2 = votexs[1].x; x3 = votexs[2].x;
y1 = votexs[0].y; y2 = votexs[1].y; y3 = votexs[2].y;
z1 = votexs[0].z; z2 = votexs[1].z; z3 = votexs[2].z;
float A = y1*(z2 - z3) + y2*(z3 - z1) + y3*(z1 - z2);
float B = z1*(x2 - x3) + z2*(x3 - x1) + z3*(x1 - x2);
float C = x1*(y2 - y3) + x2*(y3 - y1) + x3*(y1 - y2);
float D = -(x1*(y2*z3 - y3*z2) + x2*(y3*z1 - y1*z3) + x3*(y1*z2 - y2*z1));
abcd.push_back(A); abcd.push_back(B); abcd.push_back(C);
abcd.push_back(D);
}
return abcd;
}int MathCal::findMinMax(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
std::vector<std::pair<float, float> > &minmax)
{
float minX = 10000000;
float minY = 10000000;
float minZ = 10000000;
float maxX = -10000000;
float maxY = -10000000;
float maxZ = -10000000;
for (int i = 0; i < cloud->points.size(); ++i)
{
pcl::PointXYZ p(cloud->points[i]);
if (minX >p.x) minX = p.x;
if (minY > p.y) minY = p.y;
if (minZ > p.z) minZ = p.z;
if (maxX < p.x) maxX = p.x;
if (maxY < p.y) maxY = p.y;
if (maxZ < p.z) maxZ = p.z;
}
minmax.resize(0);
minmax.push_back(std::pair<float, float>(minX, maxX));
minmax.push_back(std::pair<float, float>(minY, maxY));
minmax.push_back(std::pair<float, float>(minZ, maxZ));
return 1;
}//获取点云,直接从上一步获取
cv::Mat CViewExtract::getViewer(const pcl::PointCloud<pcl::PointXYZ>::Ptr surface,
const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudView)
{
//获取大包围盒
int bx, by, bz;
std::vector<std::pair<float, float> > minmax(3);
MathCal::findMinMax(surface, minmax);
float xmin = minmax[0].first;
float ymin = minmax[1].first;
float zmin = minmax[2].first;
bx = ceil(minmax[0].second - minmax[0].first);
by = ceil(minmax[1].second - minmax[1].first);
bz = ceil(minmax[2].second - minmax[2].first);
std::vector<float> bbx;
bbx.push_back(bx); bbx.push_back(by); bbx.push_back(bz);
//std::vector<bool > visibies(surface->points.size() );//直接重新生成点,不取浮点数
//生成图像//使用OpenCV画出对应灰度图片
cv::Mat img = cv::Mat::zeros(by + 1, bx + 1, CV_32FC1);
//for ( pcl::PointXYZ p: surface->points )
for (int i = 0; i < surface->points.size(); ++i)
{
pcl::PointXYZ p = surface->points[i];
int x = p.x - xmin;
int y = p.y - ymin;
float z = p.z - zmin + 1;
//取最大Z//必须使用四邻域
int x1 = floor(x); int x2 = ceil(x); //if (x1 < 0) x1 = 0;
int y1 = floor(y); int y2 = ceil(y); //if (y1 < 0) y1 = 0;
MathCal::cutValue(x1, 0, img.cols - 1);
MathCal::cutValue(x2, 0, img.cols - 1);
MathCal::cutValue(y1, 0, img.rows - 1);
MathCal::cutValue(y2, 0, img.rows - 1);
if ( img.at<float>(y1, x1) < z) img.at<float>(y1, x1) = z;
if ( img.at<float>(y1, x2) < z) img.at<float>(y1, x2) = z;
if ( img.at<float>(y2, x2) < z) img.at<float>(y2, x2) = z;
if ( img.at<float>(y2, x1) < z) img.at<float>(y2, x1) = z;
}
//补加原始点云的四邻域//原始点云已添加,不再重复补偿,原始点云已删除
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudFourNear(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = 0; i < cloud->points.size(); ++i)
{
pcl::PointXYZ p = cloud->points[i];
float x = p.x - xmin;
float y = p.y - ymin;
float z = p.z - zmin + 1;
int x1 = floor(x); int x2 = ceil(x); //if (x1<0) x1 = 0; if (x2<0) x2 = 0;
int y1 = floor(y); int y2 = ceil(y); //if (y1<0) y1 = 0; if (y2<0) y2 = 0;
MathCal::cutValue(x1, 0, img.cols - 1);
MathCal::cutValue(x2, 0, img.cols - 1);
MathCal::cutValue(y1, 0, img.rows - 1);
MathCal::cutValue(y2, 0, img.rows - 1);
//重复填充四邻域
//若未被填充,则填充
if ( 0.0001> img.at<float>(y1, x1) ) img.at<float>(y1, x1) = z;
if (0.0001> img.at<float>(y1, x2)) img.at<float>(y1, x2) = z;
if (0.0001> img.at<float>(y2, x2)) img.at<float>(y2, x2) = z;
if (0.0001> img.at<float>(y2, x1)) img.at<float>(y2, x1) = z;
}
cloudView->resize(0);
cv::Mat imgGray = cv::Mat::zeros(by + 1, bx + 1, CV_8UC1);
float x, y, z;
for (int i = 0; i < img.rows; ++i)
{
float *ptr = img.ptr<float>(i);
unsigned char *ptrg = imgGray.ptr<unsigned char>(i);
for (int j = 0; j < img.cols; ++j)
{
if (*ptr > 0)
{
x = j - xmin;
y = i - ymin;
z = *ptr - zmin-1;
cloudView->points.push_back(pcl::PointXYZ(x, y, z));
if (z < 0) z = 0;
if (z >255) z = 255;
*ptrg = (unsigned char)z;
}
++ptr;
++ptrg;
}
}
cloudView->height = 1;
cloudView->width = cloudView->points.size();
//cv::flip(imgGray, imgGray, 2);
//cv::imshow("imgGray", imgGray);
//cv::waitKey(0);
return imgGray;
}void MathCal::cutValue(int &inv, const int start, const int end)
{
if (inv < start) inv = start;
if (inv > end) inv = end;
//return inv;
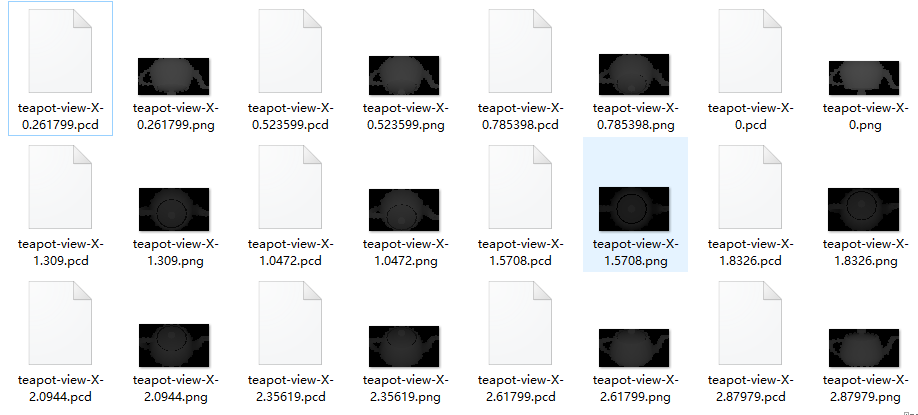
}输出结果;
通过传入viewpoint输出不同的位姿可见面

 浙公网安备 33010602011771号
浙公网安备 33010602011771号