第二节 离场保护区的绘制
飞行程序设计软件实践
一、软件准备与任务分析
软件工具:中望CAD、风标设计2023【社区版】。

下载中望CAD对应的插件(WindSpiral2023中望版.dll),使用netload命令加载插件。插件加载后会自动打开功能导航窗口,也可以通过wstools命令再次打开这个导航窗口。
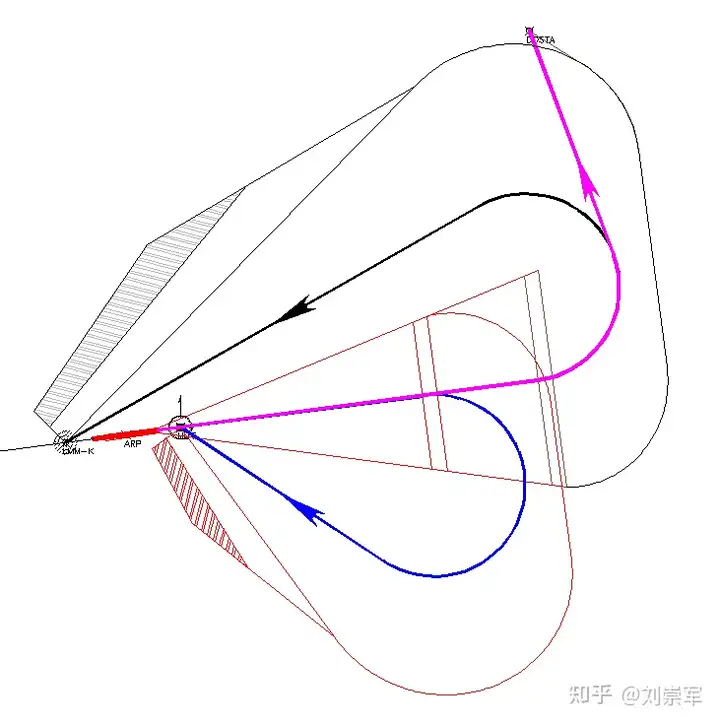
今天的任务是在第一节完成的数据文件基础上,绘制下图所示RWY08离场保护区。
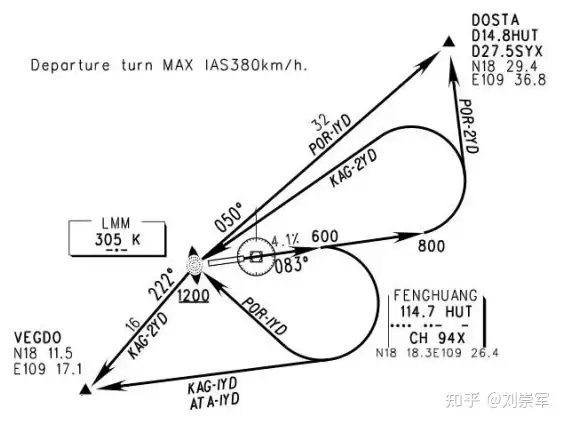
这里的离场程序属于指定高度转弯的离场方式,在离场第一段爬升梯度为4.1%。从600米高度爬升至800米的阶段,未标离场梯度,应按照默认最小离场梯度3.3%来计算。
600米高度转弯飞向导航台的这一段,属于有航迹引导,未指定向台航迹的飞行方法。转弯后直接飞向导航台,没有规定向台飞行的航迹角度。
转弯后飞向DOSTA、VEGDO点的方式,在传统程序中并不合适。因为,这样的航段缺少传统导航台的航迹引导,理论上是没办法实现精确飞向一个坐标点的。实际的导航数据库中保存了相关点的数据,航空器按照卫星导航的方式,可以飞出相应的轨迹。
二、直线段保护区的绘制
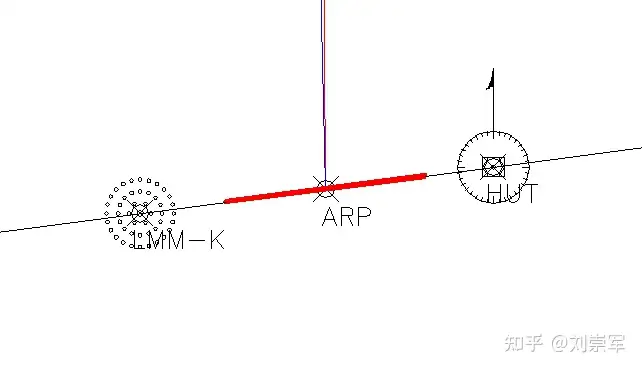
使用辅助功能菜单中的第一项,绘制“跑道中线延长线”,对应的命令为“rcl”。依次点击跑道入口、跑道末端,会得到两条40km长度的跑道延长线。
定高转弯离场程序,在没有特别要求的情况下,最早的转弯位置应从跑道入口后600米开始考虑,初始的宽度为300米。从跑道末端开始,每侧按照15°进行外扩得到离场直线段的外边界。
辅助功能里有“添加矩形框”和“绘制外扩线”功能,可以用来完成这一步的绘制。这里的矩形框功能,使用时需要先输入矩形的宽度,比如这里的300米宽度,然后指定起点、终点,得到一个矩形框。
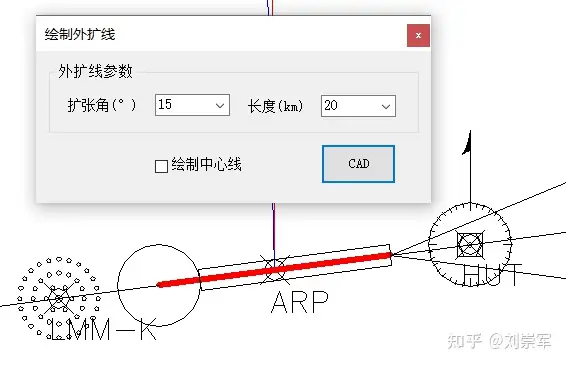
外扩线功能,先选择扩张角度、长度,然后指定起点、方向,得到两条外扩线。将外扩线移动到矩形框的边角,就会得到标准的直线段保护区边界。
已知RWY08跑道末端(DER)的高度为26.7米,转弯高度600米,梯度4.1%。那么转弯点距DER的距离等于(600-26.7-5)/4.1%=13861m。离场航空器在DER位置处时,默认至少获得5米的爬升高度,在精确计算时,这个5米不能省略。
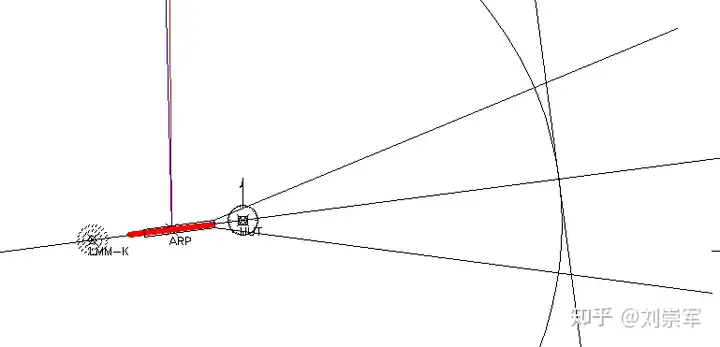
从DER位置绘制半径13861米的圆,再将中线延长线旋转(ro命令),c复制,旋转90°,得到垂线。
定高转弯程序没有定位容差,只需要计算出飞行技术误差即可。
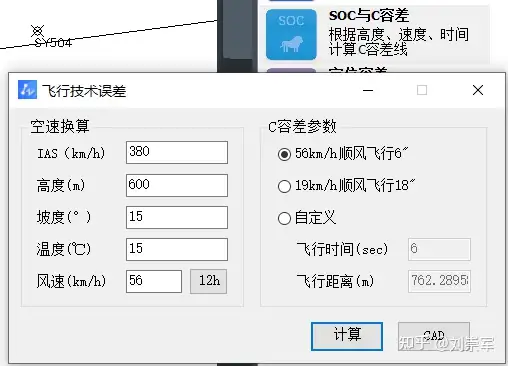
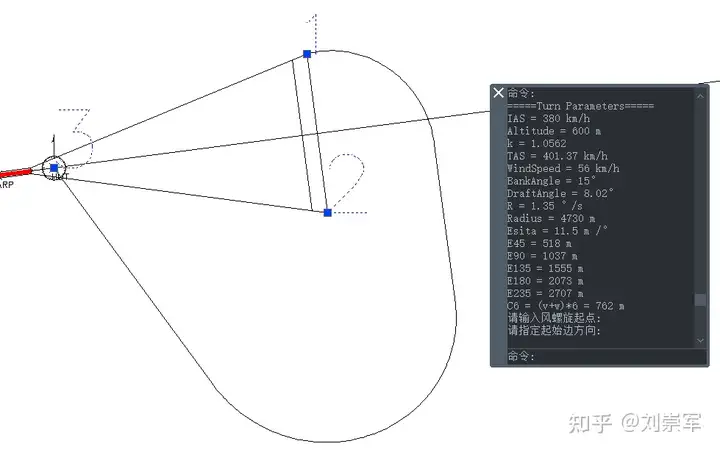
点击“SOC与C容差”菜单,打开飞行技术误差窗口,输入相关参数。离场转弯速度380km/h,坡度15°,风速56km/h。点击CAD按钮,指定C容差的起点和离场方向,得到最晚C容差线。
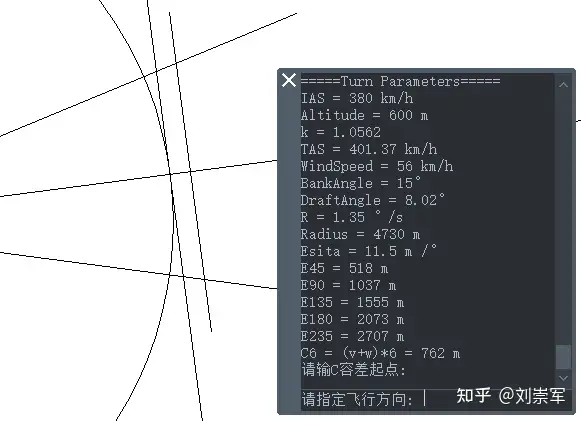
在命令窗口中可以看到相关的计算结果,转弯半径4730m后面步骤中会用到。
修剪多余的线条,完成离场直线段保护区的绘制。
三、转弯区的绘制
离场转弯段的保护区主要由风螺旋来构成转弯区的边界,通过插件中的风螺旋线功能,可以很方便的完成这一步骤。
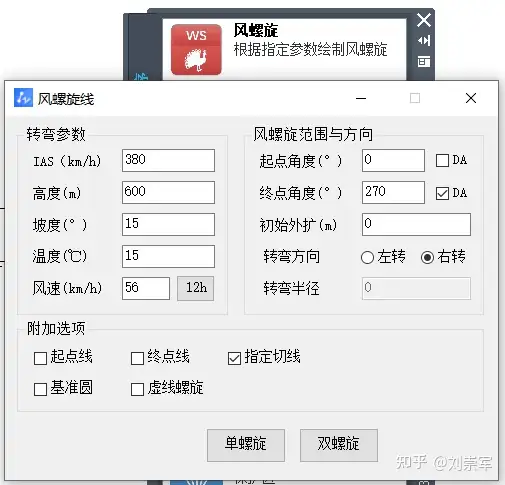
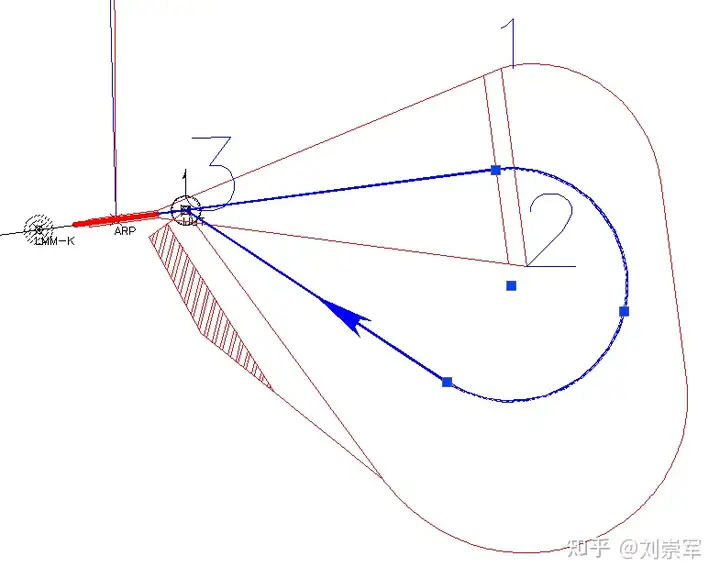
在风螺旋线窗口中,输入转弯参数,指定转弯方向,选中“指定切线”。使用双螺旋功能,依次点击C容差线的左边角、右边角、导航台,得到转弯外边界。
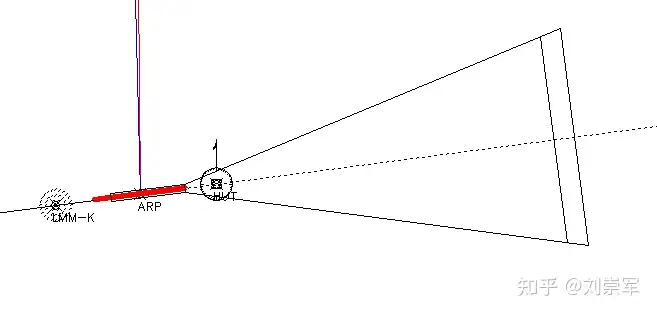
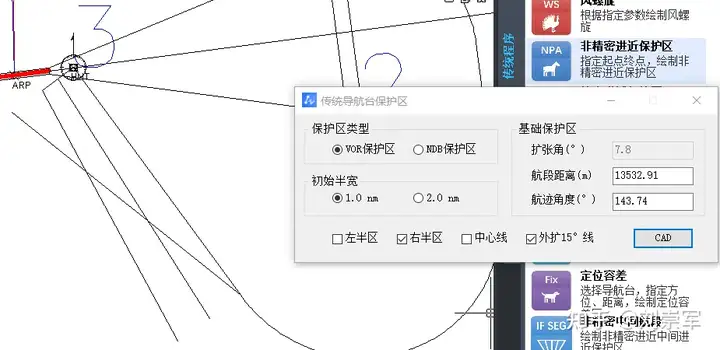
从导向台向着风螺旋线的方向补充一段导航台保护区。点击“非精密进近保护区”菜单,打开“传统导航台保护区”窗口。这里只需画一半的保护区,因此,选择右半区、15°外扩线。指定起点、终点得到绘制完成的保护区。
修剪多余线条,添加标称航迹、调整颜色、增加填充后得到如下图的效果。
四、关于转弯区的讨论
如果严格按照规范来绘制定高转弯保护区,在DER位置以及入口后600米位置绘制风螺旋,会得到如下图所示的灰色区域。
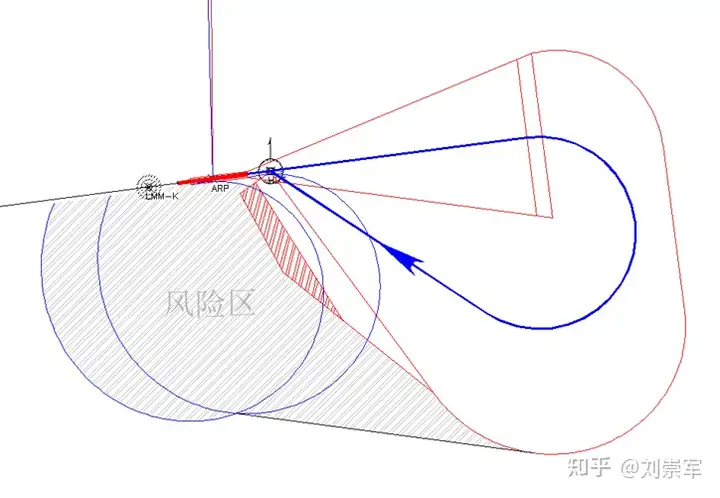
该区域在保护区绘制中容易被忽略,主要原因是转弯后飞向导航台是程序的目标,以这个目标来衡量,不可能出现转弯之后距离导航台越来越远的情况。
从评估的角度来说,到达转弯高度,并且沿着风螺旋飞行是可能存在的情况。因此,应该增加对灰色区域的高度检查,尽量让转弯高度在灰色区域高度之上,并保留至少75米的越障余度,才是更符合评估标准的设计方案。
传统离场程序,转弯后飞向航路点的保护区属于非标准的画法,只能按照无引导的方式进行考虑,基本准则是15°扩张直至获得航迹引导,或到达航路宽度。此外不再详细绘制。
插件下载地址:Gitee网站

 浙公网安备 33010602011771号
浙公网安备 33010602011771号