基线转弯保护区的绘制
读图
某机场VOR/DME进*程序*面图部分如下图所示:
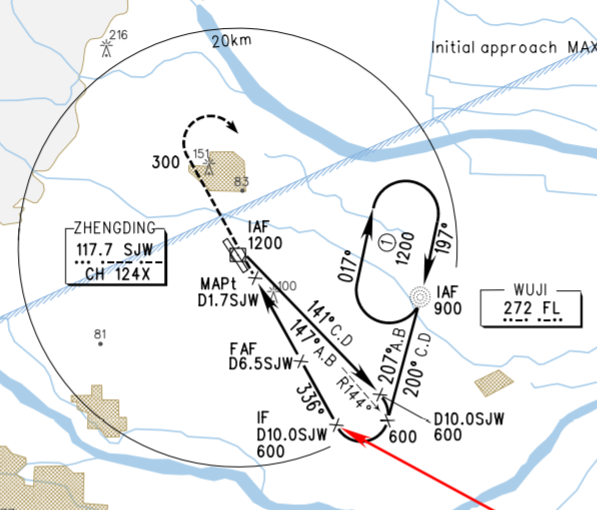
图中从ZHENDING(SJW)导航台飞出,经过一次转弯飞至IF点(D10.0SJW 高度600)的这一段就称为基线转弯程序。
分析
基线转弯程序通常出现在起始进*航段,用来衔接IAF与IF之间的飞行(无IF点的情况下,基线转弯可以衔接到FAF)。
基线转弯分为两部分,直线段的出航(从导航台飞出去),以及入航(转向导航台)转弯段。出航距离可以通过计时或是导航台定位来实现,目前通过导航台定位来实现的基线转弯更为普遍。上图中,出航距离为10.0海里,航图中用D10.0SJW(高度600米)来表示基线转弯的出航结束位置。
不同级别的航空器速度大小不一样,计算出来的转弯半径会有较大差别。飞机速度越大,转弯半径更大,出航所需的夹角也更大。基线转弯程序中通常将A、B类机型分为一组,C、D类飞机分为一组,根据它们的转弯半径大小,来计算各自的出航角度。图中A、B类飞机出航角度为147°(磁方向),C、D类飞机出航角度为141°。
计算转弯半径时,为了简化起见,通常采用基线转弯初始高度(图中为1200米)为高度基准。按照B类机型260km/h的速度进行计算,可以得到下面的参数:
IAS = 260 km/h
Altitude = 1200 m
k = 1.0881
TAS = 282.92 km/h
WindSpeed = 101.4 km/h
BankAngle = 25°
DraftAngle = 21°
R = 3 °/s
Radius = 1501 m
Phi = 9.17 degree
出航角度的计算在规范中有明确的规定,比如这里计算出的Phi角为9.17°。图中B类机型出航角度147°,入航角度336°,两者的夹角为336-180-147=9°,与我们的计算是基本吻合的。
画图
下面正式开始绘制保护区图形。
1)绘制跑道、导航台以及最后进*航迹。(最后进*方向与跑道不一致,所以航迹线与跑道有夹角)
2)绘制基线转弯保护区
打开《风螺旋标准模板》软件,在“传统模板”菜单中找到“基线转弯保护区”。填入相关参数得到下面的结果。
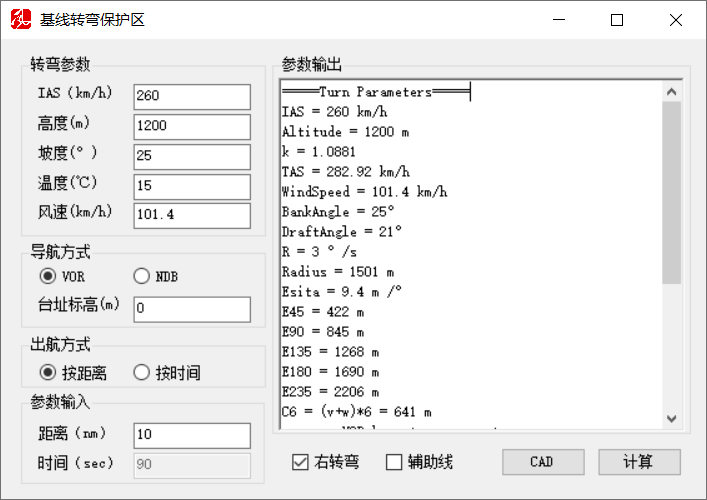
在软件中依次填入转弯参数、导航台、出航方式。点击CAD按钮,生成基线转弯保护区。
导航台的台址标高,会影响顶空盲区的大小,默认为0米时,计算的更为保守。
3)在CAD中加载生成的保护区文件并调整到位。
加载的文件在CAD中先编成组,移动、旋转时会比较方便。加载以后是下面的效果:
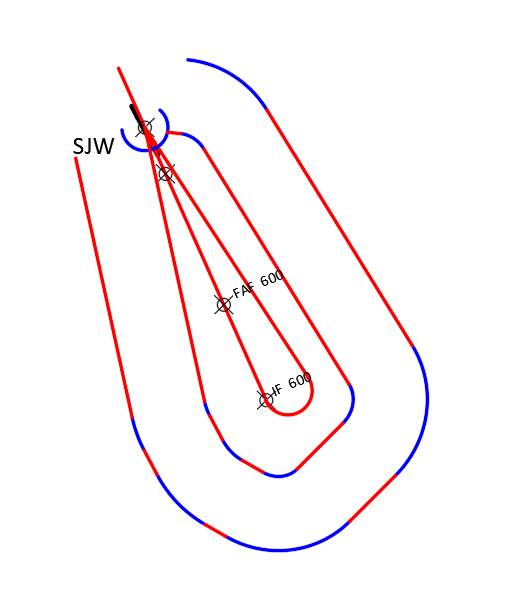
如果想从计算原理上去了解基线转弯,可以pick辅助线,生成后的基线转弯是下面的样子。
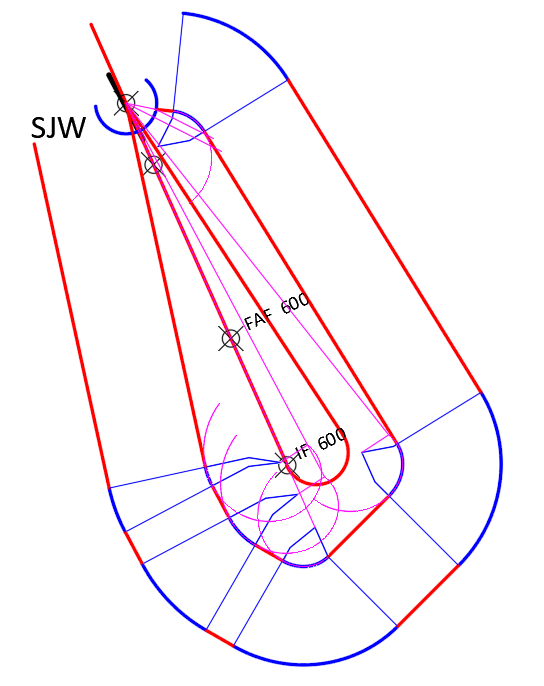
这个图形中详细列举了定位点前后引出的各条风螺旋,以及它们之间的切线。
如果将出航10海里,按照TAS 282.9km/h的速度来反推出航时间,约为236秒,按照出航计时的方式绘制出的保护区用灰色线显示,与前面计距离的保护区对比如下:
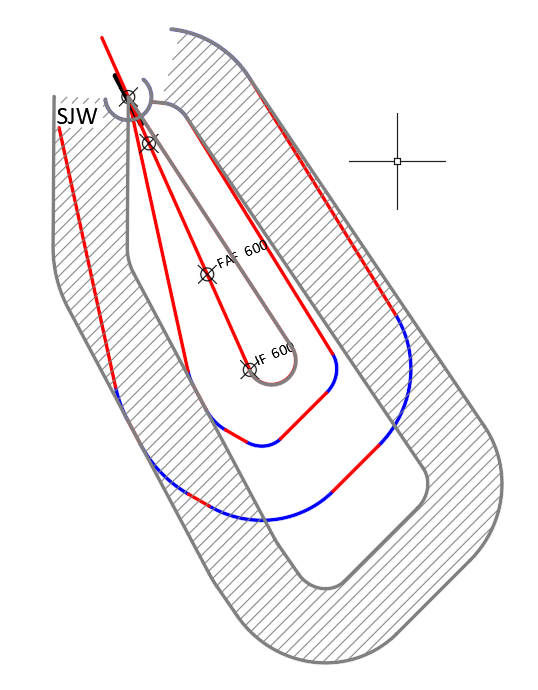
标称航迹相同的情况下,由于计时误差远大于计距离时的定位误差,所以计时转弯的保护区会显著增大。在DME几乎成为标配的情况下,计距离出航的基线转弯自然而然的成为了基线转弯模板的首选。
定距出航的基线转弯在DOC8168以及DOC9371中并未给出的明确的示例,提供的都是计时的例子。个人理解主要有这两个原因:1. 早期飞行中,计时的方式更为普遍,所以设计了大量的计时保护区模板。2. 计距离时,定位容差的大小和形状会有很多变化,难以用模板的方式进行统一,只能依照基本准则来进行推演。
在风螺旋标准模板中,定位容差按照DME定位容差大小来计算,暂未考虑DME弧的弯曲效果。
总结
1)基线转弯是起始进*航段经常采用的一种飞行方法。
2)基线转弯分为计时和计距离两种类型,目前,计距离的方式更为常用。
3)基线转弯保护区是要与起始进*航段相衔接的,因此,在导航台位置处并不需要画成闭合的形状。
4)风螺旋标准模板软件实现了基线转弯保护区的精确计算与绘制功能,在保护区绘制时,可以减少绘制的工作量,提高工作质量和工作效率。
试用版软件下载地址:
https://files.cnblogs.com/files/windspiral/WindSpiralStandardTemplate.rar
虽然传统模板的自动化来得点晚,现在和未来都将是PBN的天下,但通过对传统模板的学习可以帮助我们更好的理解保护区设计理念,坚定我们理论实践的信心。因此,理论实践中的每一步是有意义的。
今天就聊到这里,下次再见!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号