VOR/DME程序进近、复飞保护区的绘制
今天尝试画一个典型的VOR/DME进*程序保护区。
读图
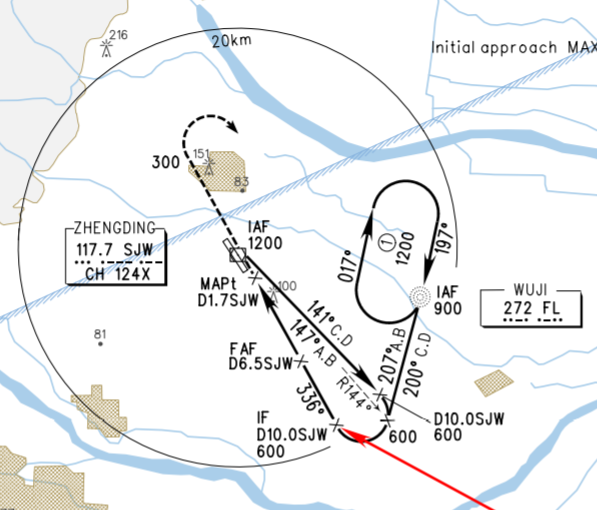
某机场VOR/DME进*程序*面图部分如下图所示:
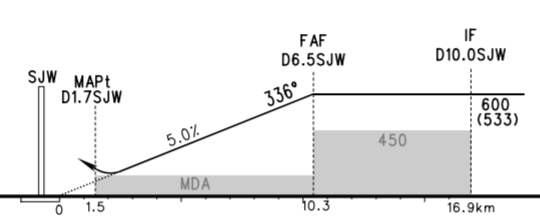
该程序剖面图部分如下图所示:
分析
该机场采用了偏置导航台布局(导航台在机场内),最后进*方向与跑道方向不致,存在4°的夹角。
中间进*航段(IF至FAF)之间为*飞,高度600米(修正海压)。从剖面图的数据600(533)可以知道,跑道入口(或者机场)的标高为600-533=67米。
最后进*航段(FAF至MAPt)的磁方向为336°,下降梯度为5.0%。
复飞程序的内容为:航空器直线爬升至300米(修正海压)高度,右转重新开始进*,或飞向WUJI导航台加入等待。
以上的位置点都是通过SJW导航台来进行的定位。以IF点为例,D10.0SJW 表示距离SJW导航台10海里(等于18.52公里)。
画图
下面正式开始绘制保护区图形。
1)绘制跑道、导航台以及最后进*航迹。(最后进*方向与跑道不一致,所以航迹线与跑道有夹角)
2)绘制最后进*航段基础保护区
打开《风螺旋标准模板》软件,在“传统模板”菜单中找到“非精密进*直线段”。打开以后是下面的界面。
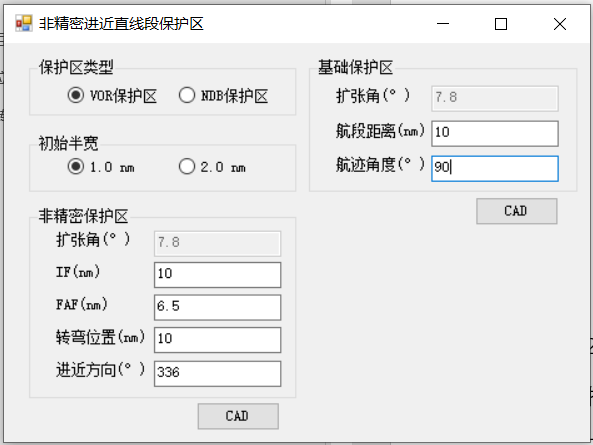
在软件中依次填入IF点、FAF点的位置数据(DME读数),转弯位置先按10海里填写。点击CAD按钮,生成非精密进*的保护区。
3)在CAD中加载生成的保护区文件并调整到位。
加载的文件在CAD中先编成组,移动、修剪时会比较方便。
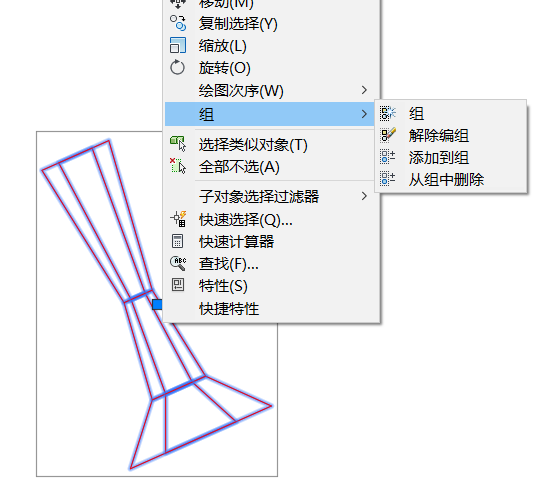
加载以后是下面的效果:
4)计算复飞转弯点位置。
通过航图可以知道,跑道入口标高77米,运行标准中各类机型的最低下降高度(MDA)均为180米(修正海压),复飞转弯高度300米。
复飞点为距离导航台1.7海里的定位点,这个定位点是通过导航信号来确认的,所以存在误差。这个误差的大小按照规范来计算等于1.7*1852*0.0125+460=500米。(实际误差还应考虑DME弧的弯曲度、VOR台的向台引导或是侧向引导等因素,这里进行了简化计算)
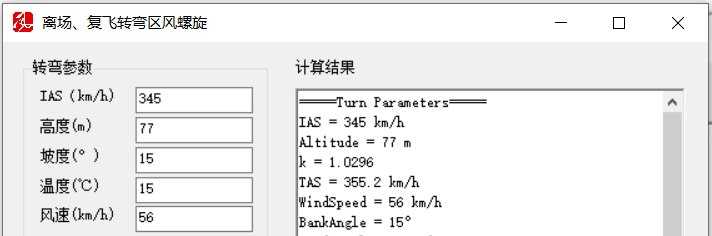
点开“传统模板”找到“双风螺旋”菜单,复飞初始段速度按照345km/h来计算,可以得到下面的参数。
复飞中间航段,飞机开始爬升的位置(SOC Start Of Climb)距离复飞点的距离为:
500+(355.2+19)*18/3.6=2371米。(定位容差加上 以真空速加19km/h的顺风飞行共计18秒的距离)
按照默认的爬升梯度2.5%,从180米爬升至300米共需要(300-180)/0.025=4800米。
以上两步计算的总距离等于:2371+4800=7171米。标注下来,如下图所示。

5)复飞转弯区绘制
复飞转弯时,高度已经升高,因此,需要按照新的高度和速度来计算转弯参数。默认情况下,D类复飞转弯最大速度为490km/h,通常我们用不到这么高的速度,在这里按照380km/h来计算。
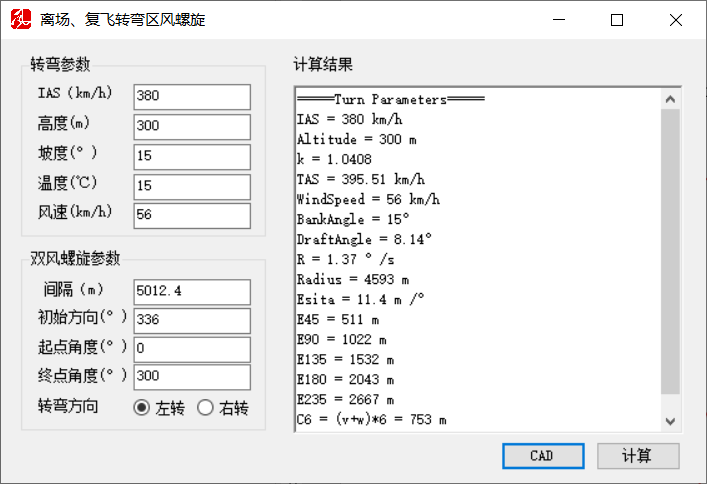
在这个复飞程序中使用了指定高度转弯。定高转弯时,转弯点没有定位容差,但是有6秒种的飞行技术误差(作图中标识为C容差),根据上图中的计算值为753米。
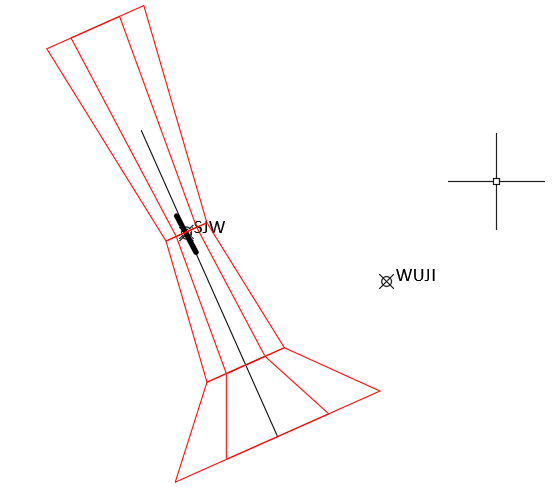
在CAD图中画出C容差线,它与保护区边界相交,从CAD中可以看到C容差线的长度为5012.4米,把它填写到模板插件中,表示双风螺旋之间的间隔。
点击CAD按钮,生成转弯区的风螺旋,加载到图层中。
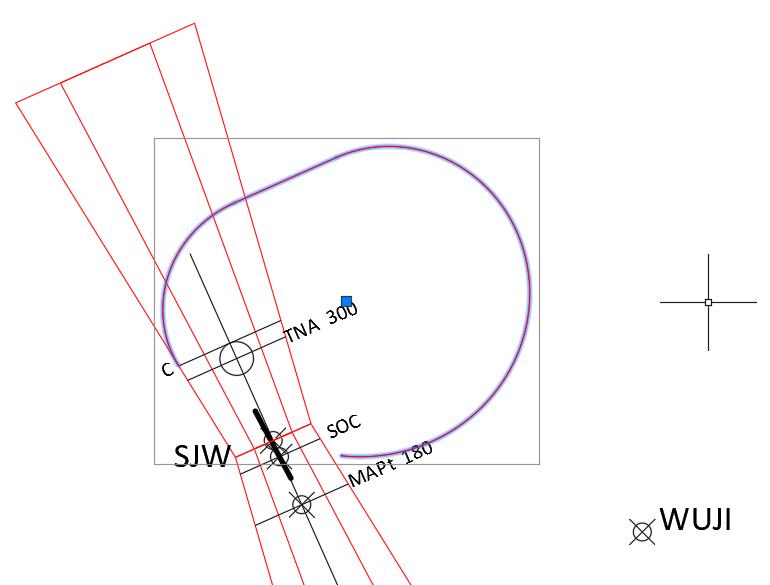
从这张图可以看到,当复飞转弯速度为380km/h时,风螺旋外边界距离SJW导航台过*,保护区看起来会比较难看。从飞行角度来说,若转弯速度过大,二次过台重新开始进*将变得比较困难。通常的解决办法有:限制转弯速度、拉长复飞距离(提高转弯高度或指定点转弯)。
今天的例子中基准方向使用的是CAD正北方向(UNITS命令),所以在模板工具中指定的角度与CAD角度一致,直接插入即可。(多数时候,地图存在一定的投影倾角,需要细微的旋转一下风螺旋插件)
6)回台保护区的绘制
为了让保护区好看一点,在这里选择复飞后飞向WUJI导航台。WUJI台是NDB台,保护区初始半宽为1.25nm。
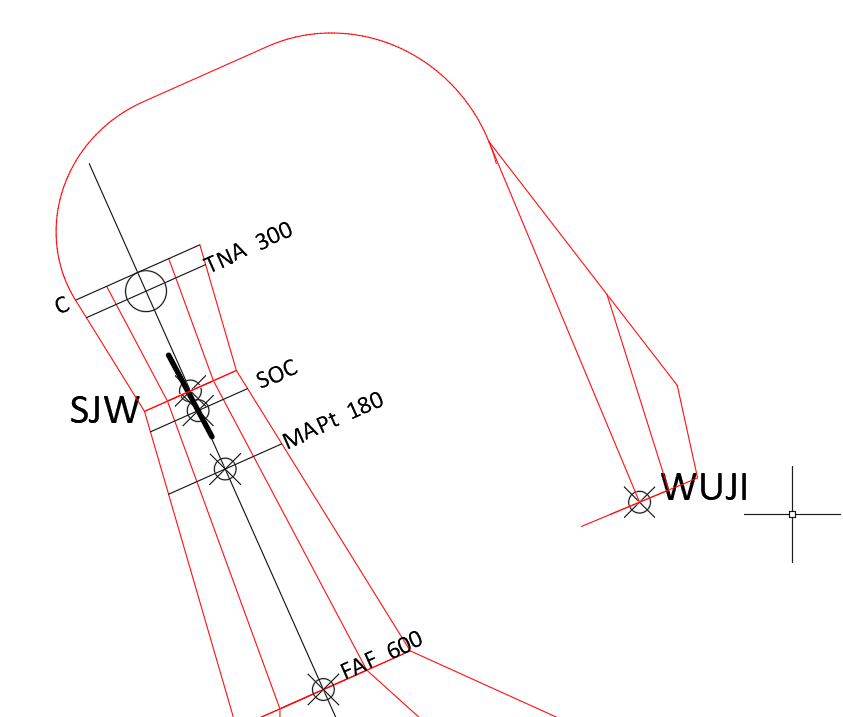
通过模板软件,绘制一个NDB台的基础保护区加载到图形中。
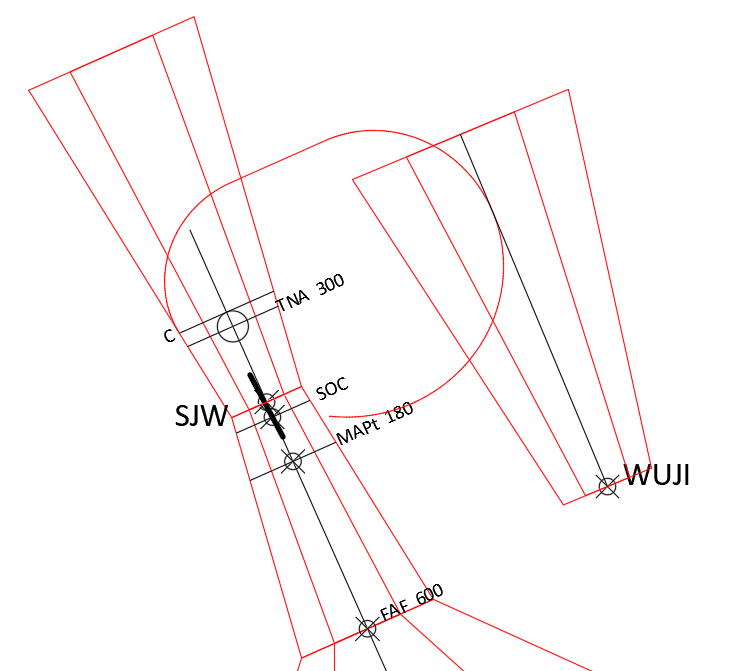
找到风螺旋与航迹方向的切点,外扩15°画线得到转弯保护区的外边界。对上面的图形进行整理,得到下面的效果。
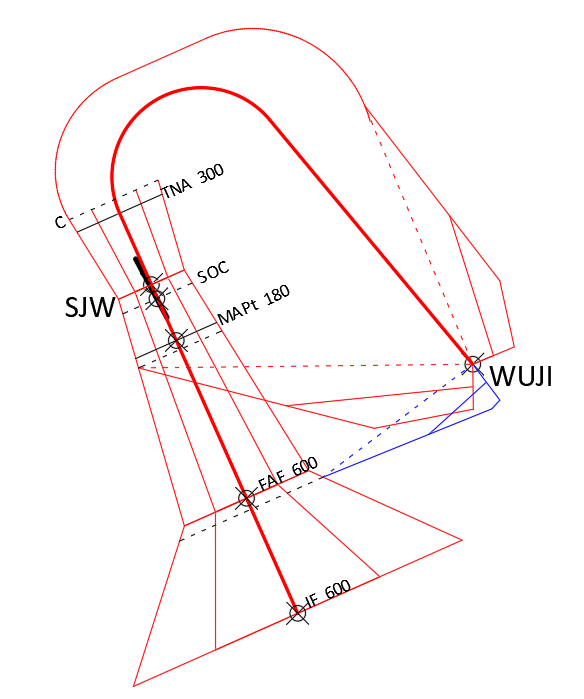
定高转弯时,最早的转弯位置可以是FAF点、或者MAPt,二者的保护区范围差别是很大的。若MAPt前禁止转弯,应在航图中加以标注,避免引起歧义。下图给出了最早转弯点在保护区中的差别,其中考虑了定位容差的大小,以及保护区最大化的原则。
VOR/DME保护区的绘制过程就是这些内容了,接下来应该进入到障碍物评估的阶段,如果障碍物对程序标准有影响,很可能需要对程序方案及保护区进行调整。通过使用标准模板插件,可以尽量的减少程序变化带来的工作量,并且提高做图的精度和效率。
总结
1)非精密进*保护区的结构主要与导航台的位置有关,所以保护区绘制时可以基于导航台位置来进行基础性的设计。
2)定位容差的大小与导航台的位置、数量有着密切的关系,这是传统程序中相对复杂的内容,需要结合导航台布局和使用方式来进行准确的分析。
3)传统制图过程中,比较复杂的是复飞转弯的计算以及转弯区风螺旋的处理。转弯区的计算可以借助Excel表格来快速实现,风螺旋的处理可以采用《风螺旋标准模板》软件来解决,绘图流程更加简洁和准确。
4)风螺旋标准模板软件实现了风螺旋的精确计算与绘制功能,在保护区绘制时,可以减轻转弯区绘制的工作量,提高工作质量和工作效率。
试用版软件下载地址:
今天就聊到这里了,周末愉快,下次再见!
以上绘图过程,仅代表个人分析过程,不代表本人所在公司或所处行业的标准流程,请谨慎参考。如有疏漏请及时联系,我们将尽快加以修订。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号