
PBN离场定高转弯保护区插件发布测试
昨天2月29日,是四年才有一次的日子,本想着应该写点什么,但一测试发现还有问题,只能先放下。
今天是三月份的第一天,一年已经过去了六分之一。疫情的关系,原本并不紧急的工作,现在也开始积压的有些多了,时间在一阵慢节奏之后开始变得仓促。为了帮助大家追赶进度,也为了充分测试软件,今天发一下PBN离场定高转弯插件。
今天的软件界面如下:
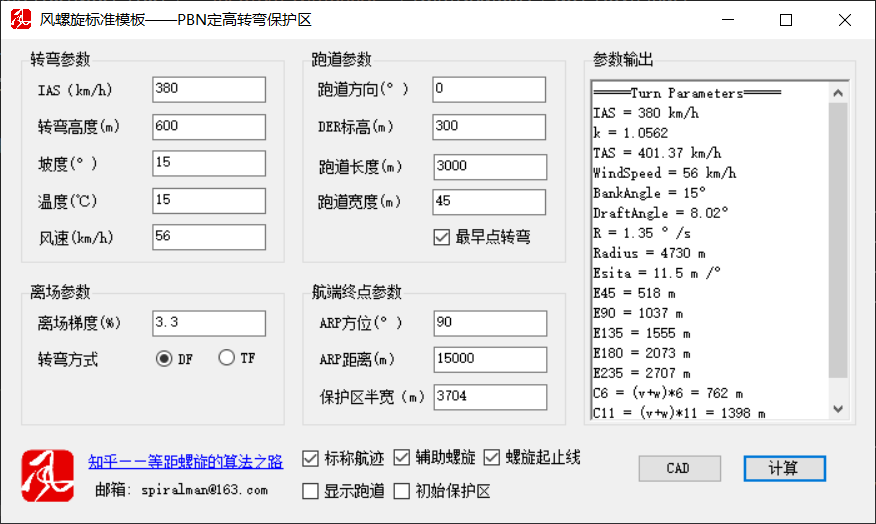
为了简便的表示离场转弯的终点,这里采用从ARP(默认为当前跑道中心点)向离场终点进行量取的办法,将量取到的方位、距离填写到文本框中,再补充好跑道的方向。软件会按照不超过180°转弯的方式,自动判断左转还是右转,并绘制保护区。
下图是一个DF方式右转的例子,软件中实现了最早点的判断,可以选择从DER转弯或是入口后600米作为最早点进行转弯。

下图是一个向左大角度转DF方式离场的例子。
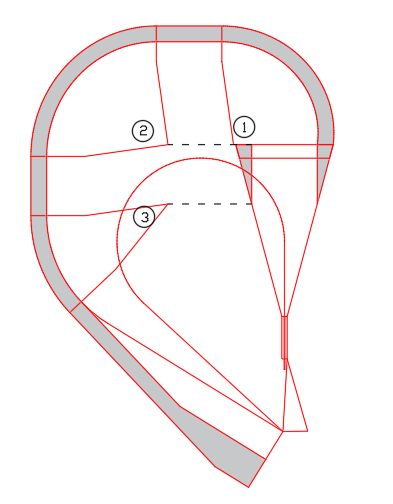
对于上面这个图例,需要提醒的是,在定高转弯中,主区最早宽度位置存在3号风螺旋。当转弯角度比较大时,3号风螺旋才会发挥作用。
当转弯角度较小时,3号风螺旋不会出现,这是DOC8168图例中最常见的情况。
目前很多PBN程序方案中采用和传统程序相似的方式,起飞后转弯直飞本场台,从而对航迹进行约束。此种情况下必须对3号风螺旋进行检查,避免最早转弯区出现不安全情况。
严格来说,在跑道入口后600米、DER位置都应该绘制风螺旋,作为定高转弯的转弯区评估边界,规范中并未对此有详细说明(DOC9368文件,第三章中对传统程序有过讨论)。从PBN原理来看,向着一个航路点飞行时,可视为有航迹引导,因此,这部分风螺旋可以被副区边界切割掉。有兴趣的朋友可以使用《风螺旋专业版》插件进行检查。
在上面大角度转弯的图例中,我们对风螺旋的起止点角度进行了自动标注。这是目前国内唯一的可以实现此种功能的算法(不排除很多公司已经实现了这一功能,只是不像我这么喜欢显摆 :-)。希望我们的领先能够给大家带来更多的方便,也希望更多的机构、单位将保护区的绘制统一到风螺旋标准上来。
CF转弯是离场中用法很灵活的一种方式,曾经看到过部分单位用CF转弯直接实现起飞后加入平行三边的功能。由于本人目前对数据库CF航段的实现逻辑并不清楚,所以仅提供一个小角度转弯CF航段作为参考(建议转弯在120°以内)。

在上面这个CF图例中,出航方向默认为是标称转弯的起点与航段终点的连线方向,并且不可调整(本软件这样设置是为了简化计算,规范中无此要求)。此部分功能仅供参考,如果有了更好的算法逻辑,再来补充这部分内容。
对软件感兴趣,或是想要参与测试的朋友,请留下邮箱,或发邮件至spiralman@163.com联系领取(已经确认过邮箱的朋友就不用重发了)。本插件有效期2个月,5月1日到期。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号