摘要:
前言 在了解NeRF与3DGS等论文前,一直用相机内参矩阵实现相机坐标系到图像坐标系的转换。了解到投影矩阵也能实现同样功能,便想了解它们之间的关系。 投影矩阵 投影矩阵可以分为两步,透视投影与正交投影。 透视投影将相机坐标系下的视锥转换为长方体,其中视锥由 [near, far] 定义的近远平面 以 阅读全文
posted @ 2024-06-22 11:17
_风的轻歌
阅读(924)
评论(4)
推荐(1)
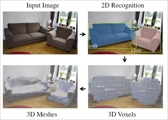 二维感知的快速发展使得系统能够准确地检测真实世界图像中的物体。然而,这些系统在2D中进行预测,却忽略了世界的3D结构。与此同时,三维形状预测的进展主要集中在合成基准(synthetic benchmarks)和孤立目标(isolated objects)。我们结合这两个领域的进步。我们提出了一个能够检测真实世界图像中的物体并生成一个给出该物体的完整三维形状的三角形网格的系统。我们称之为Mesh R-CNN。 阅读全文
二维感知的快速发展使得系统能够准确地检测真实世界图像中的物体。然而,这些系统在2D中进行预测,却忽略了世界的3D结构。与此同时,三维形状预测的进展主要集中在合成基准(synthetic benchmarks)和孤立目标(isolated objects)。我们结合这两个领域的进步。我们提出了一个能够检测真实世界图像中的物体并生成一个给出该物体的完整三维形状的三角形网格的系统。我们称之为Mesh R-CNN。 阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号