BTree
以下内容是根据《算法导论》摘要而来,由于国内书籍对B树的定义是以阶来定义,而《算法导论》中使用的是最小度来定义,并且节点中关键字个数也不相同,在翻看网上博客时,产生了诸多疑问,考虑到B树是从国外而来,我还是打算相信《算法导论》
定义
- 用最小度来t定义,t>=2,每个节点的关键字个数 t-1 < n < 2t-1,非叶子节点子女指针个数范围 t < c <2t (有j个孩子的节点,恰好有j-1个关键字)
- 非叶子节点上也有数据,适合随机检索,越靠近root,磁盘i/o时间越少,速度越快
- 所有叶子节点具有相同的深度,根节点至少有一个关键字
- 真实数据并未存放到B树的各个节点上,节点上只是存储了节点数据在硬盘上的存储地址
- 通常采用的分支因子为50-2000,主要取决于一个关键字相对于一个磁盘块|内存页的大小
- 由于根节点实现时,会一直在主存中,寻找某个关键字(仅寻找关键字,应该不含数据那一次),进行的磁盘IO次数,最多为树的高度(高度h为树的层数-1),树的深度与根节点为第几层有关,如根节点为0,则层数为3的树,深度为2,如果根节点为1,则深度为3
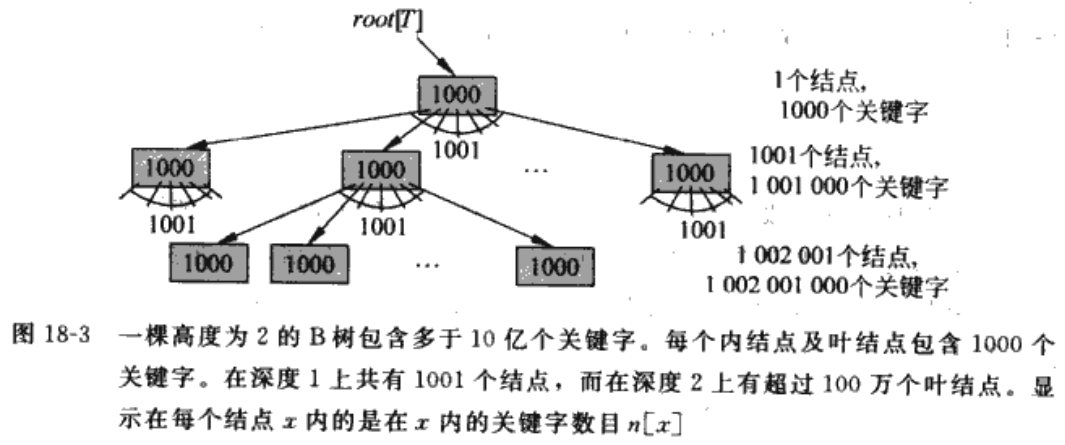
- 一颗分支因子为1001,高度为2的树,可以有10亿个关键字
- 每个页节点有相同的高度
- 树非空时,root至少含义一个关键字
搜索
实现search操作时,会用到递归
顶层调用为search(root,k)
search(node,k)
i=1
while(k> keys[i])
i++;
if(keys[i] =k)
then return (node,i)
if(leaf[i] == null)
then return null
else disk-read(leaf[i])
then return search(leaf[i],k)
时间复杂度O(tlogt(n))
插入
以最小度为4举例,节点的关键字个数为 3~7
-
如果k需要插入node x,而x不是叶节点,则应将k插入到x的子树中去,直到找到叶节点
-
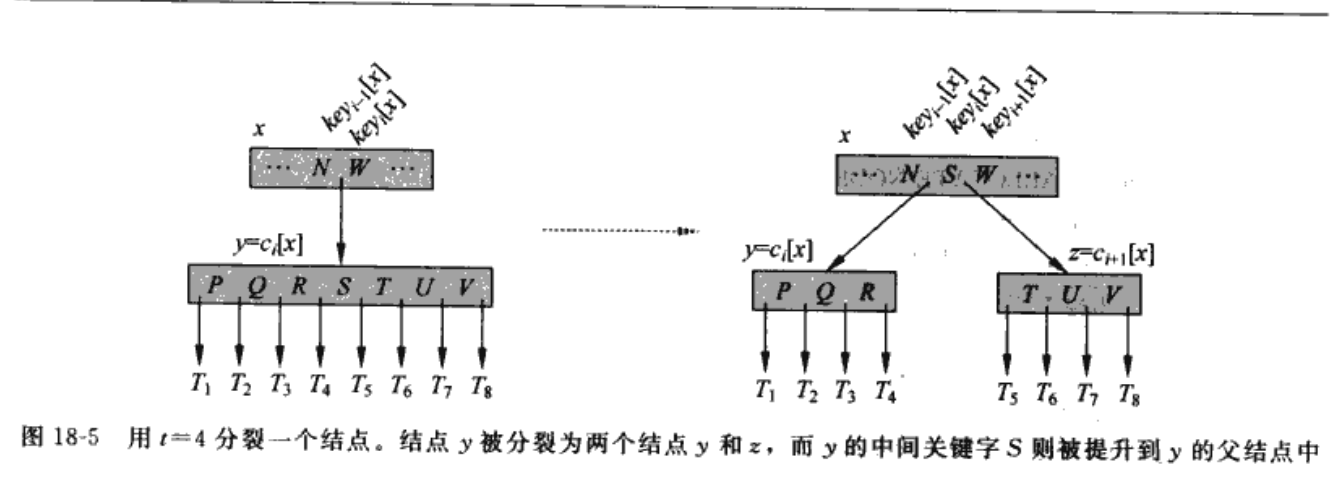
判断是否需要分裂,确保无满子节点->如果插入前节点中key的个数为7(即判断是否满子),则不能再插,因为它已经达到了最大key个数,此时需要将这个节点分裂,方法是将中间关键字上移到父节点,上移后,一个节点分裂为2个节点,左边的是小于中间key的关键字,右边是大于中间key的关键字,建立一个新的节点,使之继续满足要求,以此类推,如果中间key上移到父节点后,父节点的key大于7,则父节点按次方法继续分裂,最终可能导致根节点分裂,这样,树的高度就会 + 1,根节点分裂是B树高度增加的唯一途径
-
判断k需要插入到分裂后(如果需要分裂的话)的哪个叶子节点
-
递归插入操作,在任何时刻,需要留在主存中的页面数为O(1),注:根节点以外,根结点始终在主存中
删除
删除操作和插入操作一样,为了满足B树的性质,需要尝试合并节点,而插入操作会分裂节点
-
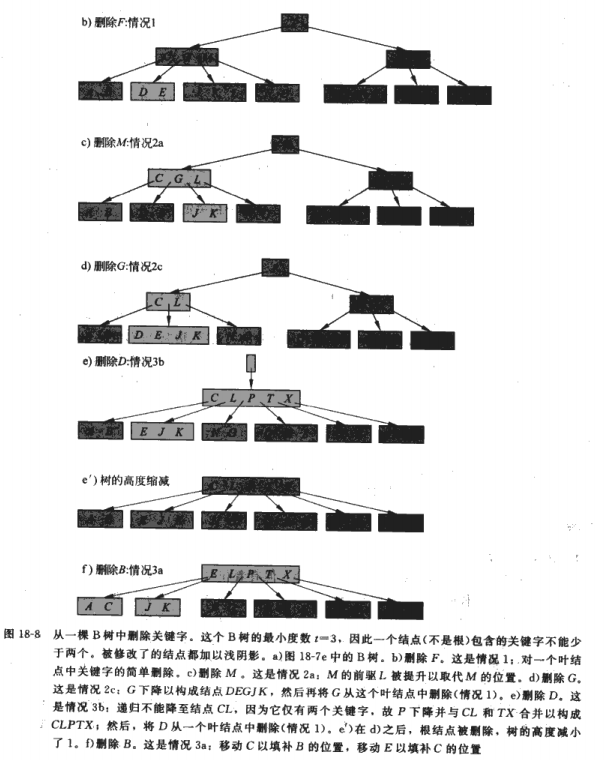
1.如果关键字k在叶子节点中,直接删除;
-
2.如果在内部节点中,则判断节点中,前于k的子节点p中关键字的个数至少有t个关键字,此时将其最大的键提到k的位置;
-
3.否则判断后于k的子节点中关键字个数大于t,如果大于,将其最小的键提到k的位置,这样树的结构变化就很小,仅需要修改几个指针
-
4.如果前于k的子节点和后于k的子节点都只有t-1个关键字,则将他们3个合并到前于k的节点上去
-
5.不在某个节点中,递归查询,查询中如果遇到相邻节点关键字较少时,将其合并,合并操作可能会导致根节点下沉,高度
-
6.k不在某个内节点中(k实际在树结构中),此时需要递归的寻找它,并且在递归寻找中,如果发现含关键字的子树的根,只有t-1个关键字,则通过移动它兄弟节点中的关键字,来保证它至少有t个关键字(至少t个关键字的原因由1.2.3点可以得知,是为了在将来的删除操作来临时,有较大概率命中1.2.3)。
-
如果根结点不含有任何关键字,但它有子节点,则需要删除根结点,从而使树的高度降低了1
这其中最重要的是第5点,它从根节点开始,会遍历所有子树中含k的节点,如果节点中不至少包含t个关键字,则会进行操作5,当删除操作以此方式操作完整个树后,树的高度可能-1;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号