
单无人机自主搜索
6.1.1 单无人机自主搜索
参考教程:
HKUST-Aerial-Robotics/FUEL: An Efficient Framework for Fast UAV Exploration (github.com)
1. 查看系统环境
要运行本仿真程序,需要保证当前环境为ubuntu18.04+ros-melodic-desktop-full
查看ubuntu版本:
rosnoetic@rosnoetic-VirtualBox:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.6 LTS
Release: 18.04
Codename: bionic
可知,当前ubuntu版本满足18.04
查看ros版本:
rosnoetic@rosnoetic-VirtualBox:~$ rosversion -d
melodic
可知,当前ros版本满足melodic
2. 安装依赖
ctrl+alt+T打开终端,执行如下指令下载相关依赖:
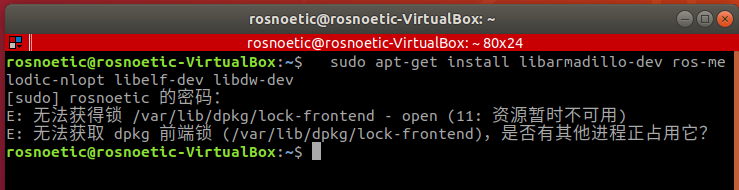
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get install libarmadillo-dev ros-melodic-nlopt libelf-dev libdw-dev
-
如果出现错误:E: 无法获得锁 /var/lib/dpkg/lock-frontend - open (11: 资源暂时不可用)
我们在使用
Ubuntu系统时经常性使用sudo apt install命令安装所需要的软件库,偶尔会出现如下问题:![]()
解决方法
首先我们需要检测进程都有哪些:
rosnoetic@rosnoetic-VirtualBox:~$ ps -e | grep apt我这里显示
![]()
接下来杀死这些进程(需要根据你自己的进程
ID更改命令)rosnoetic@rosnoetic-VirtualBox:~$ sudo kill 2746 rosnoetic@rosnoetic-VirtualBox:~$ sudo kill 2750根据实际操作,一般只用执行第一句话就可以了,第二个进行会跟着一起被杀死。
接下来非常重要:
rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /var/lib/dpkg/lock-frontend rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /var/cache/apt/archives/lock rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /var/lib/dpkg/lock rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /var/cache/apt/archives/lock执行完一般都会解决问题
如果还提示错误,先更新:
rosnoetic@rosnoetic-VirtualBox:~$ sudo apt-get update

3. 下载源码并编译
ctrl+alt+T打开终端,并执行如下指令创建工作空间:
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p uav_explore/src
进入uav_explore/src文件夹下载源码:
rosnoetic@rosnoetic-VirtualBox:~$ cd uav_explore/src/
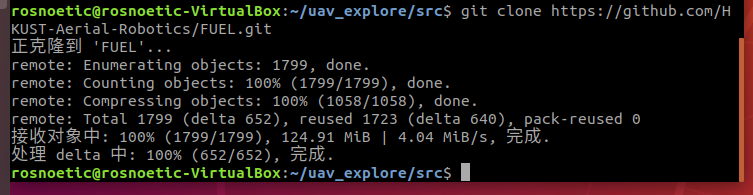
rosnoetic@rosnoetic-VirtualBox:~/uav_explore/src$ git clone https://github.com/HKUST-Aerial-Robotics/FUEL.git
编译源码:
rosnoetic@rosnoetic-VirtualBox:~$ cd uav_explore/
rosnoetic@rosnoetic-VirtualBox:~/uav_explore$ catkin_make
-
编译过程
![]()

4. 运行
4.1 扩大内存
首先关闭交换分区
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile
接着创建分区, 4 * 1024 = 4096创建 4 G 的内存分区
rosnoetic@rosnoetic-VirtualBox:~$ sudo dd if=/dev/zero of=/swapfile bs=1M count=4096

继续执行如下指令:
rosnoetic@rosnoetic-VirtualBox:~$ sudo mkswap /swapfile
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapon /swapfile

创建完交换分区之后就可以继续编译。
也可以查看分区的大小
rosnoetic@rosnoetic-VirtualBox:~$ free -m

-
如果不需要用交换内存,则执行如下指令进行关闭
rosnoetic@rosnoetic-VirtualBox:~$ sudo swapoff /swapfile rosnoetic@rosnoetic-VirtualBox:~$ sudo rm /swapfile
4.2 启动仿真
ctrl+alt+T打开终端,执行如下指令启动可视化
rosnoetic@rosnoetic-VirtualBox:~$ cd uav_explore/
rosnoetic@rosnoetic-VirtualBox:~/uav_explore$ source ./devel/setup.bash
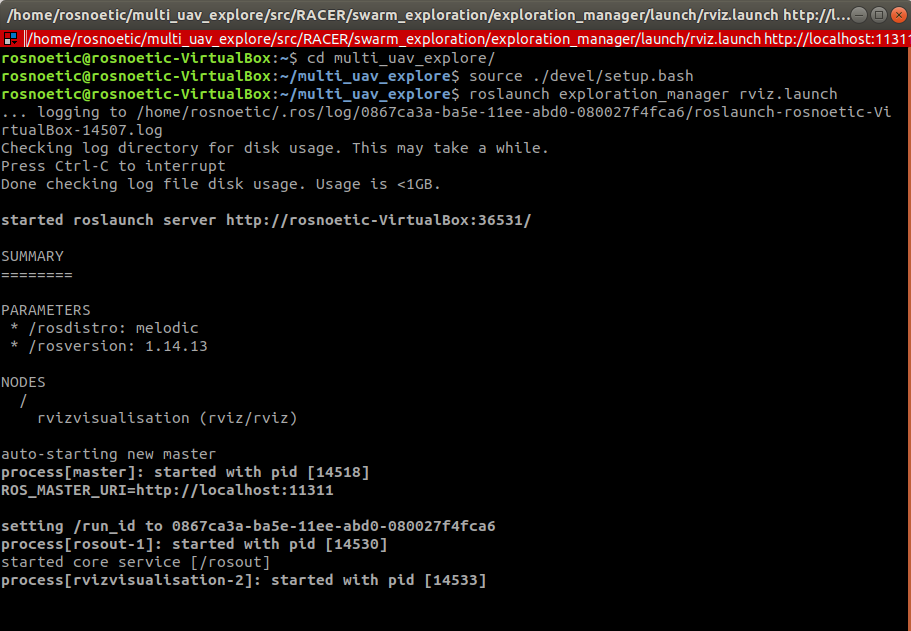
rosnoetic@rosnoetic-VirtualBox:~/uav_explore$ roslaunch exploration_manager rviz.launch
ctrl+alt+T打开终端,执行如下指令启动协同仿真:
rosnoetic@rosnoetic-VirtualBox:~$ cd uav_explore/
rosnoetic@rosnoetic-VirtualBox:~/uav_explore$ source ./devel/setup.bash
rosnoetic@rosnoetic-VirtualBox:~/uav_explore$ roslaunch exploration_manager exploration.launch
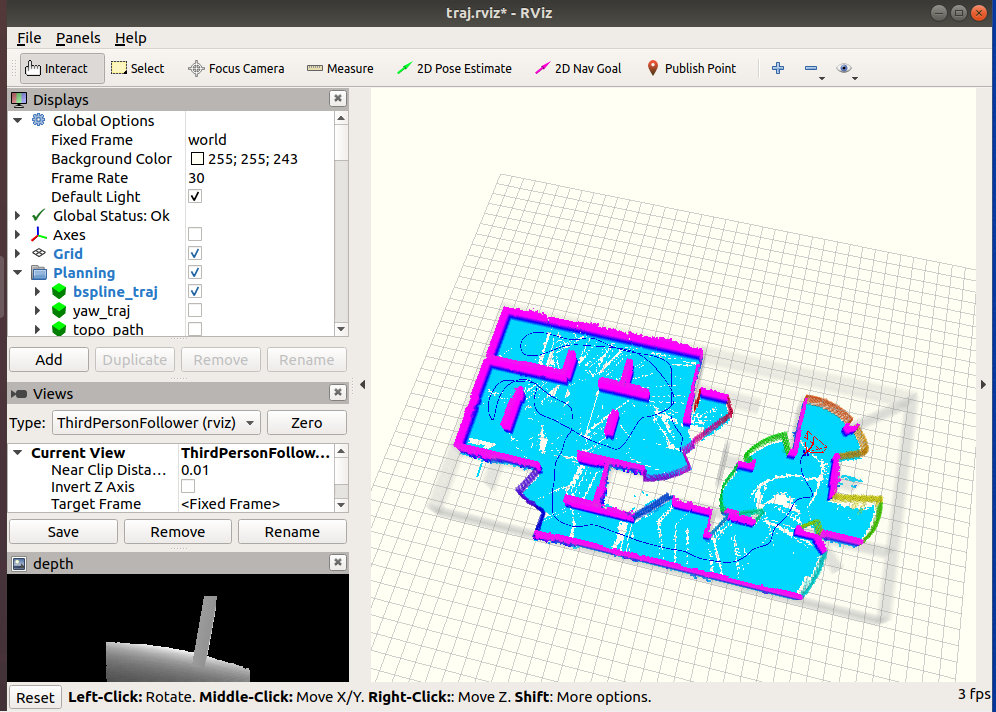
点击Rviz软件的2D Nav Goal设置目标,启动无人机运动:
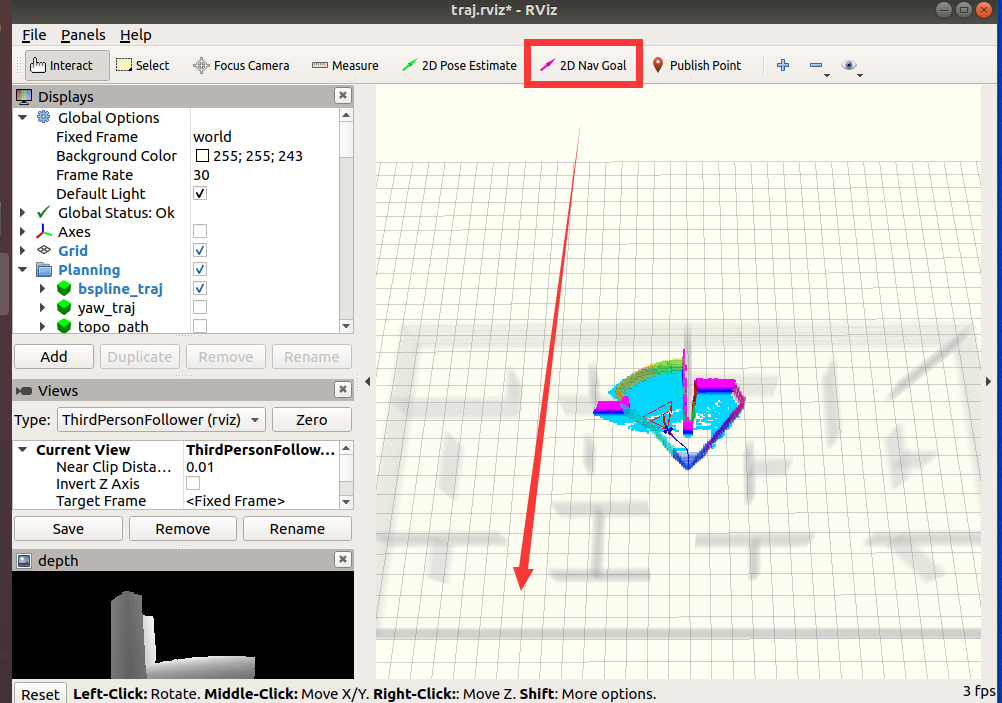
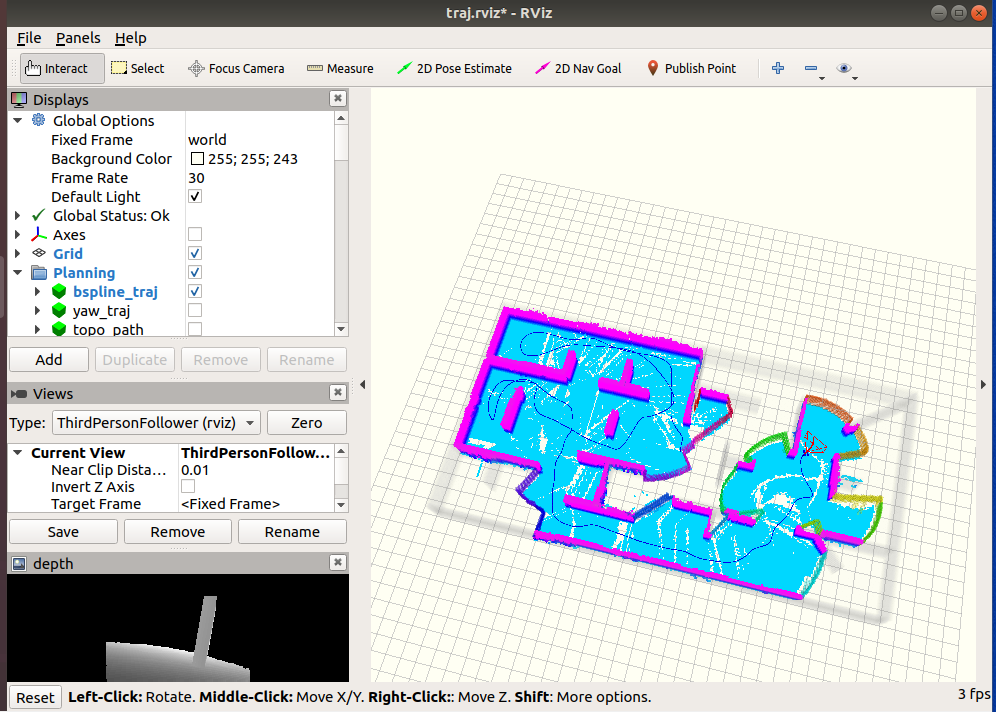
接着就可以看到无人机开始搜索,完成对地图的探索功能

 浙公网安备 33010602011771号
浙公网安备 33010602011771号