2.3 Projection Matrices and Least Squares 阅读笔记
 摘要: reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
摘要: reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
投影矩阵和最小二乘法
reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
Reference
- Course website: Projection Matrices and Least Squares | Unit II: Least Squares, Determinants and Eigenvalues | Linear Algebra | Mathematics | MIT OpenCourseWare
- Course video: 【完整版-麻省理工-线性代数】全34讲 配套教材_哔哩哔哩_bilibili
- Course summary: Lecture 16: Projection matrices and least squares (mit.edu)
- Extra Reading: Section 4.3 in Introduction to Linear Algebra, Fifth Edition by Gilbert Strang. 和 常用的向量矩阵求导公式_TangowL-CSDN博客_向量求导法则
现在有几个问题仍未解决:
-
2.1 中为什么最后的两个结论成立?
\[\boldsymbol{N}(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A})=\boldsymbol{N}(\boldsymbol{A})\\ \text{rank}(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A})=\text{rank}(\boldsymbol{A}) \] -
最小二乘法的几何意义?
这一讲一边复习投影矩阵,一边详细解释最小二乘法,最后开一个标准正交基的概念。
Recap on Projection Matrices
我们都知道投影矩阵 \(\boldsymbol{P}=\boldsymbol{A}(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\)。
- \(\boldsymbol{b} \perp \boldsymbol{C}(\boldsymbol{A})\): 则 Pb 为零向量,投影只能投到一个点,就是零向量(因为起始点为原点)
- \(\boldsymbol{b} \in \boldsymbol{C}(\boldsymbol{A})\): 则 Pb = b,投影就是自己
这些是从几何意义来看的,代数上:
- \(\boldsymbol{b} \perp \boldsymbol{C}(\boldsymbol{A})\): \(\boldsymbol{A}(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\boldsymbol{b}=\boldsymbol{A}(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}(\boldsymbol{A^{\mathrm{T}}}\boldsymbol{b})=\boldsymbol{0}\),因为 b ∈ N(AT) ⊥ C(A)
- \(\boldsymbol{b} \in \boldsymbol{C}(\boldsymbol{A})\): \(\boldsymbol{A}(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\boldsymbol{b}=\boldsymbol{A}(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{A}((\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}(\boldsymbol{A^{\mathrm{T}}}\boldsymbol{A}))\boldsymbol{x}=\boldsymbol{Ax}=\boldsymbol{b}\)
向量 p + e = b,p 在 A 的列空间里,投影矩阵为 P,而 e 在 A 的什么空间呢?左零空间,因为 e 和 C(A) 正交。那么把 p 投影到 A 的左零空间得到的投影向量便是 e 了,对应的投影矩阵是什么?
- \(\boldsymbol{e}=\boldsymbol{b}-\boldsymbol{p}=\boldsymbol{b}-\boldsymbol{Pb}=(\boldsymbol{I}-\boldsymbol{P})\boldsymbol{b}\),故 P' = I-P
Least Squares
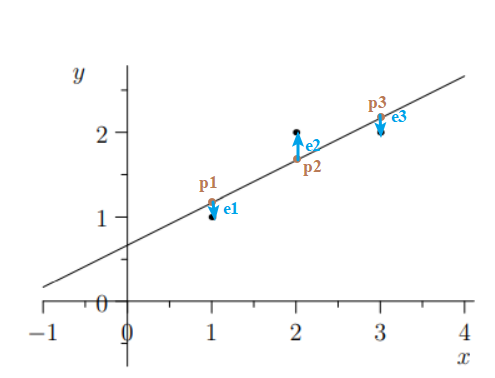
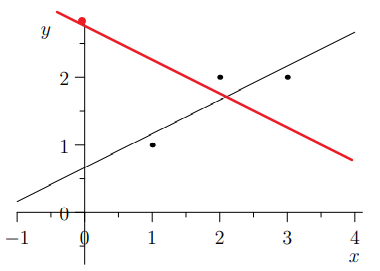
上一节我们已经知道了怎么用投影的方式拟合直线了,还算出结果来了。
整个过程是:
- 找出拟合直线系数 \(\hat {\boldsymbol{x}}\) 和投影向量 \(\boldsymbol{p}\) 。
- 使得 \(\boldsymbol{A}^\mathrm{T}\boldsymbol{b}=\boldsymbol{A}^\mathrm{T}\boldsymbol{A}\hat {\boldsymbol{x}}\),解出 \(\hat {\boldsymbol{x}}\) 和 \(\boldsymbol{p}=\boldsymbol{A}\hat {\boldsymbol{x}}\)。
为什么用投影的方式 \(\boldsymbol{A}^\mathrm{T}\boldsymbol{b}=\boldsymbol{A}^\mathrm{T}\boldsymbol{A}\hat {\boldsymbol{x}}\) 解不可解方程叫做 Least Squares 呢?
先给出 Least Squares 名字的由来:给定不可解方程 \(\boldsymbol{Ax}=\boldsymbol{b}\),求出 x 使误差的平方和最小,也就是误差向量 e 的模的平方最小。误差是数据点到拟合曲线纵坐标的差(并不是距离!虽然只是差个系数)
也就是说求:
如果 \(\underset{\boldsymbol{x}}{\arg\min}\left \| \boldsymbol{A}\boldsymbol{x}-\boldsymbol{b} \right \|^{2}=\hat{\boldsymbol{x}}=(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\),便能解释了。本节给出两个角度证明,我又用矩阵求导的角度算了一下,放在附录了 (懒得敲公式了而且这种纯算数的东西有什么意义吗?)。
Geometry
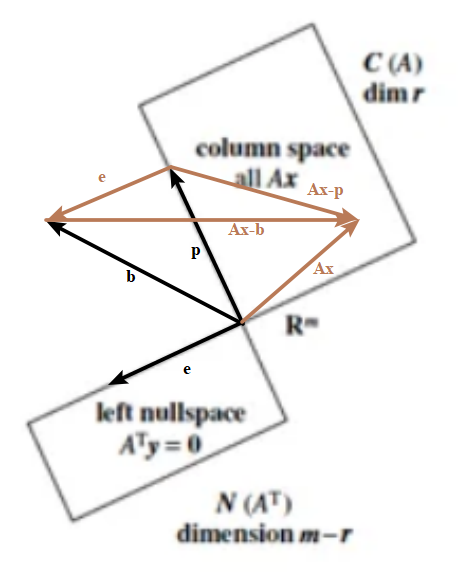
Ax 是 列空间任意向量,注意看绿色的三个向量 e,Ax-b,Ax-p,构成直角三角形,因为 e 在左零空间,和在列空间的 Ax-p 是正交的。因此 Ax-b 向量的模相当于直角三角形的斜边了,几何上,只有 Ax-b 垂直于 C(A),模才最短。
代数上 \(\underset{\boldsymbol{x}}{\arg\min}\left \| \boldsymbol{A}\boldsymbol{x}-\boldsymbol{b} \right \|^{2}=\underset{\boldsymbol{x}}{\arg\min}(\left \| \boldsymbol{A}\boldsymbol{x}-\boldsymbol{p} \right \|^{2}+\left \| \boldsymbol{e} \right \|^{2})\)。因此 x 为 满足 Ax=p 的 x。所以 \(\boldsymbol{x}=\hat{\boldsymbol{x}}\)。此时的误差正好等于投影向量与原向量的误差。
Derivative
已经有:
于是
对 f 求 C 和 D 的偏导得:
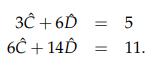
正好和:
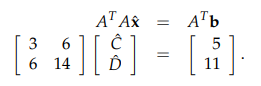
一致。
Matrix Derivative
略。
Drawback
线性拟合会受到异常数据点/离群量 (outlier) 干扰,导致和理论得直线偏差过大。
此外很多问题是非线性的,怎么能用直线拟合?
Prove \(\boldsymbol{A}^\mathrm{T}\boldsymbol{A}\) Properties
-
需要证明 \(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0}\) 的解空间和 \(\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0}\) 一致。也就是说证明 \(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0}\Rightarrow\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0}\)。
\[\begin{matrix} &\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0} \\\Rightarrow &\boldsymbol{x}^{\mathrm{T}}\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0} \\\Rightarrow &(\boldsymbol{A}\boldsymbol{x})^{\mathrm{T}}\boldsymbol{A}\boldsymbol{x}=\boldsymbol{0} \\\Rightarrow &\left \| \boldsymbol{Ax} \right \|^{2}=\boldsymbol{0} \\\Rightarrow &\boldsymbol{Ax}=\boldsymbol{0} \end{matrix} \] -
零空间都一样,故 dim 一样,r = n - dim 且 n 一样,故 r 一样。
-
然后利用第二条就能证明 A 列满秩 ATA 方阵可逆。
为什么可以用最小二乘法,可以用公式 \(\hat{\boldsymbol{x}}=(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\) 来求 Ax=b 的近似解?大前提就是 ATA 方阵可逆,A 列满秩。
Dependent Columns
如果不满足呢?举个例子:
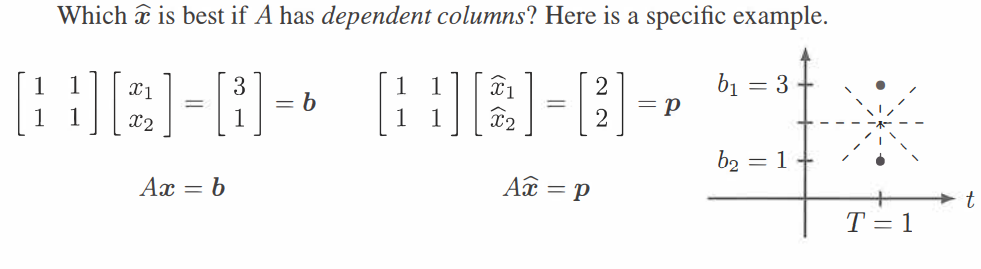
显然 C+Dt 无法表示一个垂直 t 轴的直线,因此无法穿过 (1,1) 和 (1,3)。为了使拟合直线距离两个点在 t=1 的误差最小,显然需要穿过 (1,2) 这个点,但是这会有无穷多的解。学了伪逆之后我们会有一个从这些解中选择的基准。接下来,还是讨论如果 A 的列向量独立的情况吧。
Orthonormal Vectors
其实一组相互正交的单位向量可以作为一组基,一定是独立的,称为标准正交向量 (Orthonormal Vectors),它们可以构成标准正交基。下一讲我们会说明如果对列向量独立的矩阵 A 求出其列空间标准正交基,并说明这样做的好处.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号