2.2 Projections onto Subspaces 阅读笔记
 摘要: reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
摘要: reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
投影
reference的内容为唯一教程,接下来的内容仅为本人的课后感悟,对他人或无法起到任何指导作用。
Reference
- Course website: Projections onto Subspaces | Unit II: Least Squares, Determinants and Eigenvalues | Linear Algebra | Mathematics | MIT OpenCourseWare
- Course video: 【完整版-麻省理工-线性代数】全34讲 配套教材_哔哩哔哩_bilibili
- Course summary: Lecture 15: Projections onto subspaces (mit.edu)
这一讲来解释为什么上一讲里面解求 \(\boldsymbol{Ax}=\boldsymbol{b}\) 的近似解要变成 \(\boldsymbol{A}^{\mathrm{T}}\boldsymbol{A}\hat{\boldsymbol{x}}=\boldsymbol{A}^{\mathrm{T}}\boldsymbol{b}\)。这里涉及了投影 (Projection) 的概念,因此需要解释一下。
首先先回顾一下最熟悉的平面直角坐标系下的投影。
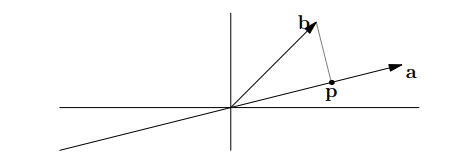
a 是二维空间中过原点的一个 subspace,想求直线上距离 b 点最近的点,显然需要作垂线得到垂足 p,即为最近的点。此时向量 p 就是向量 b 在子空间直线上的投影。
高中的时候要求投影向量 p 的话印象里是先 \(\left || \boldsymbol{b} \right ||\cos\theta\cdot\frac{\boldsymbol{a}}{\left || \boldsymbol{a} \right ||}\),相当于投影向量的模乘 a 方向的单位向量。上下同乘 a 的模得到:
三角函数看起来总是不那么简洁,这一节将用矩阵的形式来阐述投影,同样从二维开始。再解释求近似解和投影的关系,最后给出一般性的投影公式和最小二乘法简单应用。
Two Dimension
此时有一个误差向量 e,方向从 p 到 b,e=b-p。
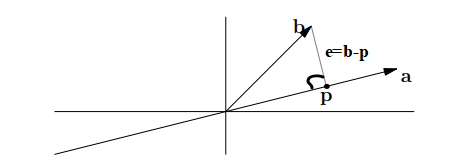
这里体现出了正交性,e ⊥ a,即:
设 \(\boldsymbol{p}=\boldsymbol{a}\hat x\),则有:
因此有:
其实和上面的高中版本等价。
分析这个式子发现 a 在给定直线的时候任取直线内一点(一个向量),p 都是不会变的,因为就相当于给原来的 a 加个系数,上下同乘系数的平方,消了,不过 b 要是数乘一个倍数投影向量 p 也会同乘相同系数。这说明投影向量只和被投影的向量 b 和 给的直线有关,和直线内的向量 a 无关。
Projection Matrix
对 p 进行一下结合律:
于是有:
为投影矩阵。
这个矩阵有什么性质呢?
- \(\boldsymbol{P}^\mathrm{T}=\boldsymbol{P}\):显然。
- \(\text{rank}(\boldsymbol{P})=1\):1.12 中已经提到,列向量乘行向量会得到秩 1 矩阵,此外 P 的列空间是什么呢?列向量的线性组合的张成空间,即 Pb 的张成空间,也就是投影向量 p 所在的空间了,是直线啊,维度为1因此秩为1.
- \(\boldsymbol{P}^2=\boldsymbol{P}\):因为对一个向量往一条直线上投影两次和投影一次是一样的啊。
Why Project?
为什么要投影呢,这和求 \(\boldsymbol{Ax}=\boldsymbol{b}\) 的近似解有关系。
为什么 \(\boldsymbol{Ax}=\boldsymbol{b}\) 无解?因为 \(\boldsymbol{b}\) 不在 \(\boldsymbol{A}\) 的列空间。
如果把 \(\boldsymbol{b}\) 投影到 \(\boldsymbol{A}\) 的列空间得到 \(\boldsymbol{p}\),就可以解近似的方程 \(\boldsymbol{A}\hat{\boldsymbol{x}}=\boldsymbol{p}\) 了,怎么求 p 呢?涉及到高维空间的投影了,下面来研究。
Higher Dimensions
以 3 维为例推导公式。
假设我们要求三维空间的一个向量 b 在二维平面上一个投影 p,二维平面有两个基向量 a1,a2。看起来像这样:
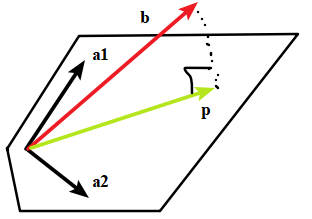
这个平面便是 \(\boldsymbol{A}=\begin{bmatrix} \boldsymbol{a}_1 & \boldsymbol{a}_2 \end{bmatrix}\) 的列空间。
仍然有 e ⊥ ai,i = 1 和 2,即:
用矩阵形式合并得:
这里设 \(\boldsymbol{p}=\boldsymbol{a}_1\hat x_1+\boldsymbol{a}_2\hat x_2=\boldsymbol{A}\hat {\boldsymbol{x}}\),于是有:
这时我们发现向量 e 的空间就是 A 的左零空间,即 \(\boldsymbol{e}\in\boldsymbol{N}(\boldsymbol{A}^\mathrm{T})\),我们已经知道了左零空间与列空间正交,因此向量 e 也与列空间正交,这和我们的直观是对应的。
上一讲提到 \(\text{rank}(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A})=\text{rank}(\boldsymbol{A})\),这里已经假设了 a1 和 a2 是二维平面的基,因此独立,A 列满秩,因此 \(\boldsymbol{A}^{\boldsymbol{\mathrm{T}}}\boldsymbol{A}\) 可逆,故得 \(\hat {\boldsymbol{x}}\):
投影矩阵 P:
如果 A 是可逆方阵,\(\boldsymbol{p}=\boldsymbol{a}_1\hat x_1+\boldsymbol{a}_2\hat x_2=\boldsymbol{A}\hat {\boldsymbol{x}}\),向量 p 所在空间为整个空间,说明向量 b 被投影到整个空间,那也就是它自己了,Pb=b,一计算此时P=I。但是通常 A 不是方阵,根本不可逆。
给出两点比较容易证的性质:
- \(\boldsymbol{P}^\mathrm{T}=\boldsymbol{P}\)
- \(\boldsymbol{P}^2=\boldsymbol{P}\)
Least Squares Fitting A Line
现在来简单应用一下投影——最小二乘法,我们经常需要拟合直线:
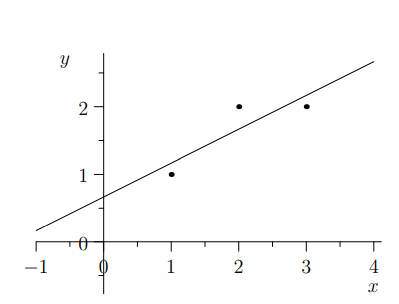
三个点坐标 (1,1) (2,2) (3,2) 显然不在一条直线上。
可以用 \(y=C+Dx\) 拟合,因此需要解方程:
表示成 \(\boldsymbol{Ax}=\boldsymbol{b}\) 显然无解:
于是需要把 b 投影到 A 的列空间得到投影向量 p,解 \(\boldsymbol{A}\hat{\boldsymbol{x}}=\boldsymbol{p}\) 即 \(\boldsymbol{A}^\mathrm{T}\boldsymbol{A}\hat {\boldsymbol{x}}=\boldsymbol{A}^\mathrm{T}\boldsymbol{b}=\boldsymbol{A}^\mathrm{T}\boldsymbol{p}\)
得 \(\hat{\boldsymbol{x}}=(\boldsymbol{A^{\mathrm{T}}\boldsymbol{A}})^{-1}\boldsymbol{A^{\mathrm{T}}}\boldsymbol{b}=\begin{bmatrix} \frac{2}{3}\\\frac{1}{2} \end{bmatrix}\)
因此拟合直线:\(y=\frac{2}{3}+\frac{1}{2}x\)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号