

ubuntu18 系统下Ardupilot开发环境搭建
在虚拟机中首先安装Ubuntu18,具体这里不再赘述
一、首先在虚拟机中安装git
sudo apt-get update
sudo apt-get install git
sudo apt-get install gitk git-gui
二、然后下载ardupilot源码
git clone https://github.com/ArduPilot/ardupilot
cd ardupilot
git submodule update --init --recursive
由于github下载速度较慢,在这里可以使用阿木实验室的国内git服务器,具体连接在这里
https://mp.weixin.qq.com/s/M445Msny6R5TPt5_pc5_4w
三、然后在ardupilot目录下执行下面的命令
Tools/scripts/install-prereqs-ubuntu.sh -y
其实可以打开该目录查看一下,会发现里面有好多自动化脚本,对于部署开发环境来说非常方便

当然由于也存在以下坑,后面会详细解释
- 新版本sh文件目录有所改变,现在集中在/ardupilot/Tools/environment_install中,对应ubuntu安装文件依然是install-prereqs-ubuntu.sh。另外需要注意的是这个sh文件默认是没有运行权限的,需要通过chmod +x install-prereqs-ubuntu.sh增加运行权限才可以执行。
- 脚本中首先通过apt-get安装包,但是在国内由于众所周知的原因,默认的安装源下载较慢或是无法下载,安装前需要将apt-get更换为国内安装源。
- 脚本中使用pip2安装需要的包,同样需要更换为国内源。
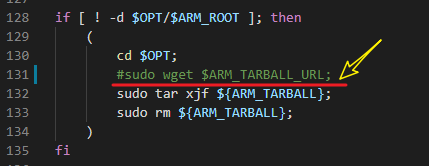
- 在安装个过程中会安装ARM交叉编译工具链gcc-arm-none-eabi-6-2017-q2-update-linux,在脚本中默认使用wget下载,速度奇慢无比,可以事先下载并且自行解压到/opt目录下,这样安装的时候会跳过下载,节省很多时间。不过在这里最好注释掉该自动化脚本wget下载arm-linux-gcc编译器的这一行,如下图所示:
上述问题都注意到的话,整体安装过程应该是比较顺利的。之后就需要配置路径:
. ~/.profile
到此Ardupilot的开发环境就已经安装好,但是使用过程中还是有些小坑。
- ardupilot源码已经转向Waf工具编译,所以编译指令有所区别,并且需要注意一定在ardupilot安装的根目录执行,这点与make不同。
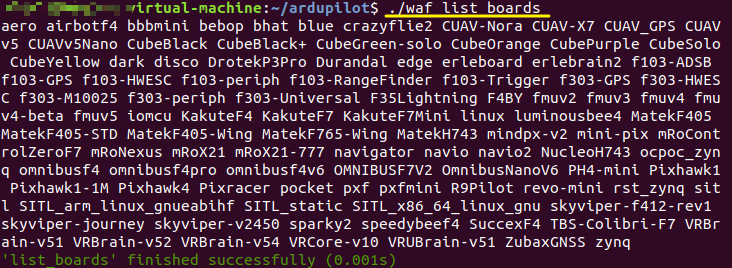
- waf编译前需要配置飞控运行板卡,但是之前网上教程所提到px4-v1、px4-v3等板卡名称都已经被替换,可以使用./waf list_boards命令查询支持板卡对应的参数。
然后就可以进行固件编译了,我编译的是多旋翼仿真固件
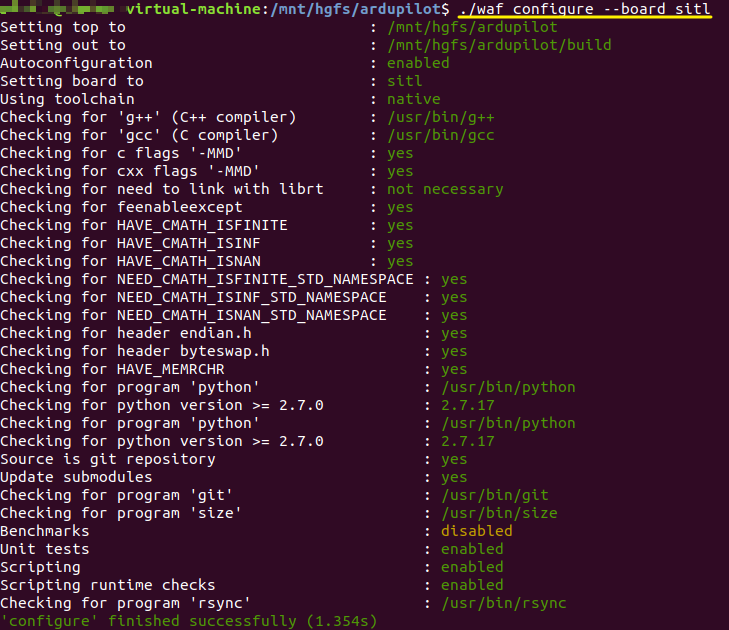

编译成功后会有如下内容:


