会员
周边
众包
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
menu
Doing's Blog
博客园
首页
联系
订阅
管理
随笔 - 9
文章 - 8
评论 - 0
阅读 -
14275
随笔分类 -
学习笔记
Bresenham Algorithm
摘要:
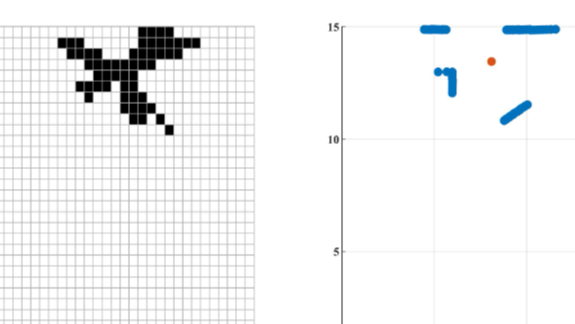
Bresenham Algorithm 为了通过雷达构建占用栅格地图,需要计算雷达扫过的障碍栅格和非障碍栅格。如下图, 于是采用
B
r
e
s
e
n
h
a
m
A
l
g
o
r
i
t
h
m
B
r
e
s
e
n
h
a
m
A
l
g
o
r
i
t
h
m
快速计算占用栅格集合。 算法思路 首先假设两个坐标点,分别为雷达测量的起点和终点 \[(x_1,y_1),(x_2,y
阅读全文
posted @
2024-03-04 17:50
DOinging
阅读(76)
评论(0)
推荐(0)
编辑
动态窗口法
摘要:
动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度
ω
(
t
)
ω
(
t
)
、速度
v
(
t
)
v
(
t
)
表示在
t
t
时刻的运动状态。 除此之外,还需要引入坐标
x
(
t
)
x
(
t
)
、
y
(
t
)
y
(
t
)
、
θ
(
t
)
θ
(
t
)
分别表示
t
t
时刻的坐标(\(x,
阅读全文
posted @
2024-02-24 14:10
DOinging
阅读(374)
评论(0)
推荐(0)
编辑
公告
昵称:
DOinging
园龄:
3年3个月
粉丝:
3
关注:
0
+加关注
最新随笔
1.Bresenham Algorithm
2.动态窗口法
3.图像金字塔绘制
4.灰度质心法绘出带方向的标注圆
5.FAST角点检测离散圆形扫描
6.OTSU阈值分割算法
7.RC522线圈设计及相关参数的选定
8.NE555构成多谐振荡器及三角波、正弦波的生成
9.NE555基本原理及相关公式的推导
我的标签
硬件
(4)
STM32
(3)
NE555
(2)
MATLAB
(2)
传感器
(2)
RC522
(1)
MPU6050
(1)
图像
(1)
近场通信
(1)
串口
(1)
合集
CMAKE(4)
STM32(4)
随笔分类
琐碎MATLAB绘图(3)
学习笔记(2)
硬件(3)
随笔档案
2024年3月(1)
2024年2月(1)
2023年10月(3)
2023年5月(1)
2022年1月(3)
阅读排行榜
1. NE555构成多谐振荡器及三角波、正弦波的生成(4060)
2. NE555基本原理及相关公式的推导(2242)
3. RC522线圈设计及相关参数的选定(1393)
4. 动态窗口法(374)
5. OTSU阈值分割算法(209)
6. Bresenham Algorithm(76)
7. 灰度质心法绘出带方向的标注圆(51)
8. 图像金字塔绘制(17)
9. FAST角点检测离散圆形扫描(10)
推荐排行榜
1. NE555基本原理及相关公式的推导(1)
点击右上角即可分享
more_horiz
keyboard_arrow_up
dark_mode
palette
选择主题
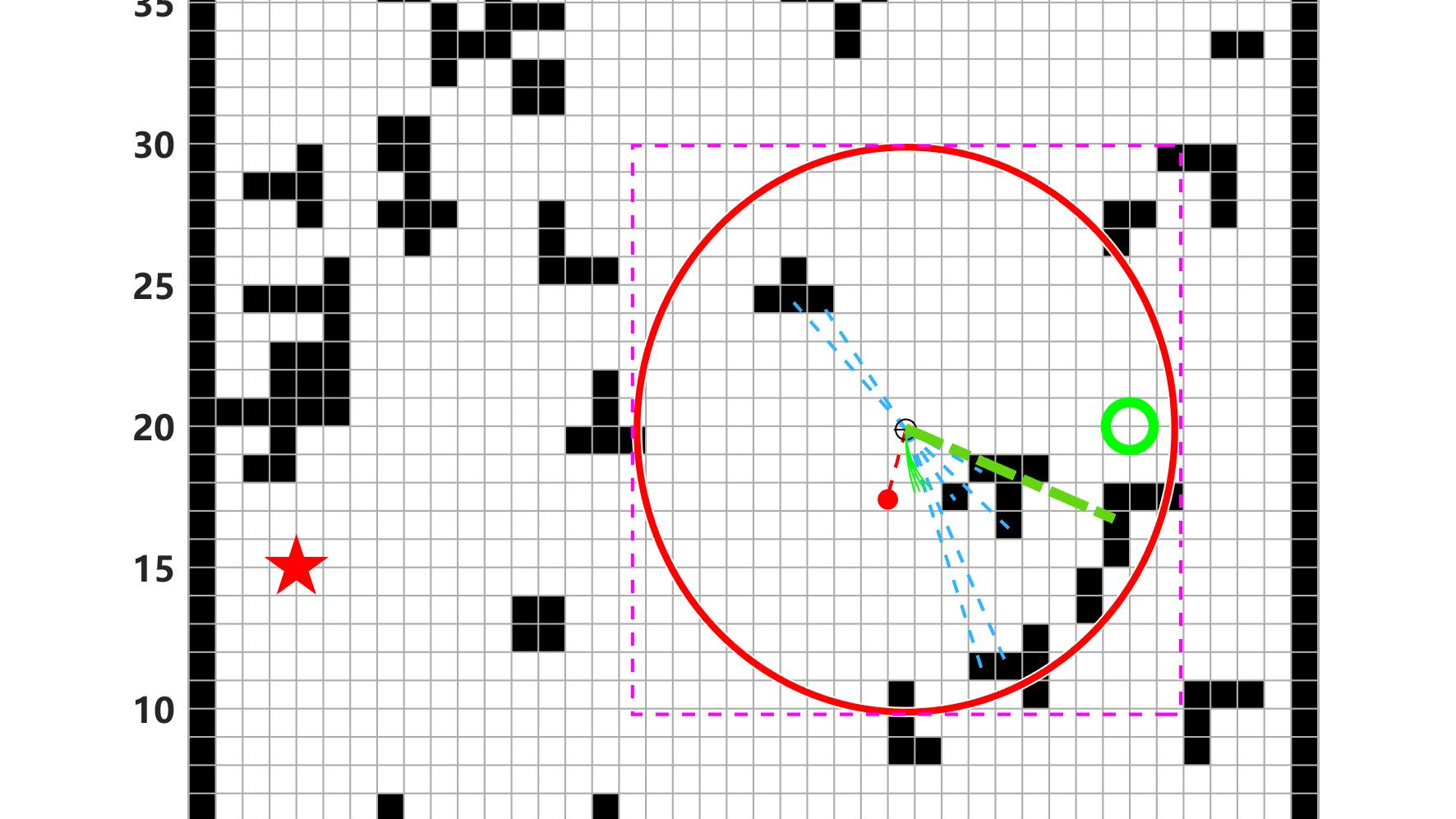 动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度
动态窗口法 运动模型建立 假设机器人的平移速度和旋转角速度可以独立地进行控制。如下图使用角速度
