论文学习:AGCRN
Adaptive Graph Convolutional Recurrent Network for Traffic Forecasting
用于交通预测的自适应图卷积循环网络
会议:NIPS2020
作者:Lei Bai, Lina Yao, Can Li, Xianzhi Wang, Can Wang
论文地址:https://dl.acm.org/doi/10.5555/3495724.3497218
代码地址:https://github.com/LeiBAI/AGCRN
复现
GPU: A100
| 数据集 | 节点数量 | MAE | MAPE | RMSE | epoch | 时间消耗(h,min) |
|---|---|---|---|---|---|---|
| PEMS03 | 358 | 15.89 | 14.89 | 27.98 | 100 | 0h50 |
| PEMS04 | 307 | 19.54 | 12.93 | 31.87 | 100 | 0h40 |
| PEMS07 | 883 | 21.09 | 8.97 | 34.92 | 100 | 1h45 |
| PEMS08 | 170 | 16.50 | 10.64 | 26.52 | 100 | 0h25 |
模型
节点自适应参数学习 NAPL-GCN
原本的GCN为:
作者认为,不同节点模式不同,这种贡献参数\(\Theta\)的方式,只能捕获所有节点共有的信息,忽略了节点自己的信息
因此改为:
按道理来说,是不能写成矩阵乘法的形式的,因为维数对不上,看看代码咋写的:
暂且不考虑代码中的batch数B和切比雪夫阶数K这两个维度,那么\((I_N+D^{-\frac12}AD^{-\frac12})\in R^{N\times N}\),\(X\in R^{N\times C}\),\(E_\mathcal G\in R^{N\times d}\),\(W_\mathcal G\in R^{d\times C\times F}\)。先进行的是前两个\((N\times N)(N\times C)=(N\times C)\)和后两个\((N\times d)(d\times C\times F)=(N\times C\times F)\),然后这两个相乘\((N\times C)(N\times C\times F)=(N\times F)\)。这里最后一个乘法不是常规的矩阵乘法,代码中使用einsum实现。
einsum:如矩阵乘法,可以写成np.einsum('ij,jk->ik', A, B),其中:
- 在输入数组的标记之间,重复字母表示沿这些轴的值将相乘,这些乘积构成输出数组的值。
- 从输出标记中省略的字母表示沿该轴的值将被求和。
在上面(NxC)(NxCxF)->(NxF)的实例中,沿C轴的数字对应相乘,并求和。
数据自适应图生成 DAGG
作者认为预定义的图结构与预测任务没有直接关系,会导致很大偏差,因此完全使用自适应的图。直接训练出拉普拉斯矩阵:
其中\(E_A\in \mathbb R^{N\times d_e}\)表示节点嵌入,因此GCN表示成:
图划分和子图训练的方法很好地解决自适应图生成的训练问题[1]
图划分和子图训练这是什么? 也没在代码上看到相应的部分,感觉像是加速计算的东西,再问问吧~ #不解
自适应图卷积循环网络 AGCRN
集成NAPL-GCN、DAGG和循环门控单元GRU:
实验
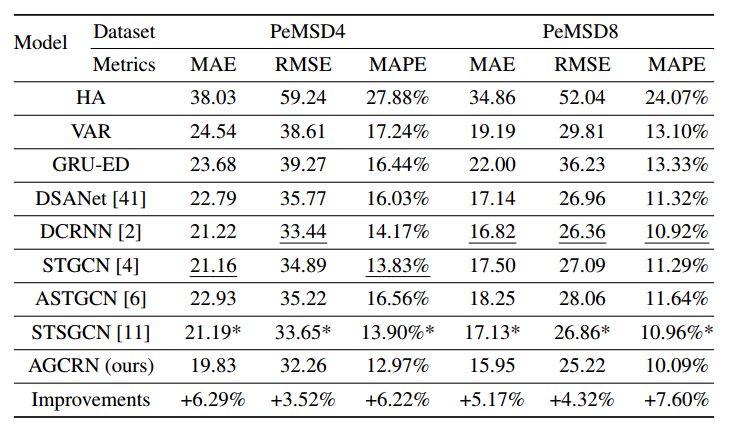
对比试验结果:
 |
|---|
| AGCRN实验结果 |
作者还用实验寻找最合适的嵌入维数,实验证明是10最好。
作者还对DAGG进行了一些修改,然后比较结果。如去掉GCN公式中的单位矩阵,使用二阶切比雪夫多项式等。
总结
- 为每个节点单独设置参数的想法很好
section3.3 "Graph partition and sub-graph training methods" ↩︎

 浙公网安备 33010602011771号
浙公网安备 33010602011771号