
(原创)多线程并发:AQS源码分析(1)——独占锁的实现原理
谈到java中的并发,我们就避不开线程之间的同步和协作问题,谈到线程同步和协作我们就不能不谈谈jdk中提供的AbstractQueuedSynchronizer(翻译过来就是抽象的队列同步器)机制;
(一)、AQS中的state和Node含义:
AQS中提供了一个int volatile state状态的变量用来标识共享资源,AQS定义了两种资源的占用方式:
同时也提供了一个LCH队列,用来存放获取共享资源时候发生阻塞的Node节点,这个节点是对需要获取资源线程的一个封装,包含了线程本身和Node节点的状态waitStatus,一共分为五种:
/**表示当前节点中线程已经被取消调度,当timeout或者interrupt(假如会响应中断的话)会触发节点变更为此状态,此节点的状态再不会发生变化*/
static final int CANCELLED = 1;
/**表示当前节点中线程释放资源后需要唤醒后继节点线程,在采用尾插法将新结点加入到同步队列的时候,会将新结点的前继节点设置为SIGNAL */
static final int SIGNAL = -1;
/**表示当前节点中的线程在等待一个Condition唤醒,在其他线程中调用了这个Condition的signal()会将此Node从等待队列的队头转移到同步队列的队尾,尝试竞争共享资源 */
static final int CONDITION = -2;
/**共享模式下,当前节点中的线程不仅需要唤醒后继节点,还需要唤醒后继节点的后继节点*/
static final int PROPAGATE = -3;
除了上面这四种还有一个0,表示节点初始状态,可以看出waitStatus<0才代表该节点是一个有效节点(即结点中的线程可以正常调度)。
AQS的设计其实是采用了模版方法的设计思想,在AbstractQueuedSynchronizer中这个顶层类中只提供了一些公共的方法实现如:同步队列的维护等,而共享资源的获取和释放只提供了方法的定义,并不提供具体的实现(只是抛出了 unsupportedOperationException异常),通过这种方式就达到让自定义的队列同步器去强制实现的目的。
上面我们提到,AQS定义了资源的两种占用方式:独占和共享,主要也就对应tryAcquire()-tryRelease(),tryAcquireShared()-tryReleaseShared()两组方法需要我们自己去实现了:
1、tryAcquire()独占模式,尝试获取资源,成功为true,失败为false;
2、tryRelease()独占模式,尝试释放资源,成功为true,失败为false;
3、tryAcquireShared()共享模式,尝试获取资源,负数为失败,等于0为成功获取,没有剩余资源,大于0为成功获取,有剩余共享资源;
4、tryReleaseShared()共享模式,尝试释放资源,释放之后需要唤醒等待节点为true,否则为false;
(二)、代码剖析:
1、acquire(int)方法:
此方法是AQS框架中获取独占锁的的入口方法,代码如下:
public final void acquire(int arg) { /*尝试获取共享资源,尝试成功直接返回*/ if (!tryAcquire(arg) /* 1、抢占共享资源失败,则将当前节点放入到同步队列的尾部,并标记为独占模式; * 2、使线程阻塞在同步队列中获取资源,直到获取成功才返回;如果整个过程中被中断过就返回true,否则就返回false;*/ && acquireQueued(addWaiter(Node.EXCLUSIVE), arg)) { /*阻塞获取资源的过程中是不响应线程中断的,内部进行了中断检测,检测到了中断请求,所以这块进行线程中断*/ selfInterrupt(); } }
上面代码的大概执行流程是:
1、加塞抢占共享资源(因为同步队列中可能还有其它节点等待),获取成功则直接返回;
2、当前线程抢占共享资源失败,调用addWaiter()将当前线程包装成Node节点,加入同步队列的尾部,并将当前节点标记为独占模式(EXCLUSIVE),并返回这个节点;
3、当前线程调用acquireQueued()方法阻塞在同步队列上获取共享资源,该方法是一个同步方法,直到成功获取了共享资源才会返回,在这个阻塞获取资源的过程中,如果检测到发生了线程的中断会返回true,否则会返回false;
4、在第3步中阻塞获取资源的过程中也不会响应中断,所以在上个获取共享过程中,检测到了线程中断标记会在acquireQueued()方法返回为true时候,再调用selfInterrupt()中断一次线程;
2、addWaiter(Node mode)方法:
private Node addWaiter(Node mode) { /*以给定的模式将当前线程包装成node节点*/ Node node = new Node(Thread.currentThread(), mode); /*快速采用尾插法,将当前节点插入到同步队列的队尾*/ Node predNode = tail; if (predNode != null) { /*preNode <-- node*/ node.prev = predNode; /*采用CAS将node设置阻塞队列的尾节点,设置成功,说明没有并发*/ if (compareAndSetTail(tail, node)) { predNode.next = node; /*尾插法插入成功,则直接返回当前节点*/ return node; } } /*"自旋"将节点加入到队列的尾部,直到成功为止*/ enq(node); return node; }
此方法是当前线程首次抢占共享资源不成功,将当前线程以指定的模式(独占或者共享)包装成Node插入到同步队列的尾节点的方法,其执行逻辑也在代码中详细注释了,再概括下:
1、将当前线程包装为一个新的Node节点,并标记为独占模式;
2、如果当前同步队列的尾节点不为空(表示当前队列不为空),采用尾插法,将新的Node节点插入到同步队列的尾部,考虑到多线程并发的安全问题采用了CAS方式设置同步队列的尾节点,设置成功则就直接返回这个新结点;
3、如果快速插入不成功(可能有两种情况:1、tail为空,即当前同步队列为空;2、tail不为空,但是在使用CAS设置尾节点的时候出现了线程并发安全问题),则就调用enq(Node),采用“自旋”,直到
将新结点成功插入到同步队列的尾部;
3、enq(Node) 方法:
private Node enq(final Node node) { /*"自旋",将给定的节点插入到同步队列的尾部*/ for (;;) { Node t = tail; /*同步队列为空,则创建一个thread为null的Node节点作为同步队列的头结点,并且将尾节点也设置为头结点*/ if (t == null) { /*CAS操作,设置同步队列的头结点*/ if (compareAndSetHead(new Node())) { /*将尾节点设置为头结点,进入下次"自旋"*/ tail = head; } }else { /*尾部节点不为空,则进行正常添加动作*/ node.prev = t; /*CAS操作,设置同步队列的头结点*/ if (compareAndSetTail(t, node)) { t.next = node; return t; } } } }
此方法采用了“自旋”操作,并结合CAS操作,在保证多线程并发线程安全的前提下,一定可以安全地将这个新结点插入到同步队列的尾部。
此段代码的执行流程是:
1、判断这个同步队列是否为空(判断tail为空即可),为空则创建一个空节点(不包含任何线程),并向尾节点也指向头结点,
2、然后进行下一次的自旋尝试CAS操作,将方法传入的Node节点尝试加入到队列的尾部,也通过一定次数的自旋操作,一定会加入到同步队列的尾部,然后退出;
3、如果一开始进入这个方法,队列不为空,则就执行第2步骤不断尝试,直到成功;
到此为止addWaiter()方法中的逻辑就分析完了,执行完毕之后返回,就行调用acquireQueued(Node)方法阻塞此线程,等待获取资源了。
acquireQueued(Node,int)方法:
final boolean acquireQueued(final Node node, int arg) { /*标记阻塞获取资源的过程中是否发生了异常*/ boolean failed = true; try { /*标记线程阻塞的过程中是否发生了中断*/ boolean interrupted = false; /*线程自旋阻塞*/ for(;;){
/*获取当前节点的前驱结点*/ final Node p = node.predecessor(); /*1、前驱结点是头结点,则说明当前线程有资格获取共享资源,尝试获取,获取成功,将当前节点设置为头结点*/ if (p == head && tryAcquire(arg)) { /*将当前节点设置为头结点*/ setHead(node); p.next = null; //help GC failed = false;
/*返回线程在阻塞的过程中是否接受到了中断请求*/ return interrupted; } /*2、3当前节点的前驱结点不是头结点,判断当前线程是否可以挂起*/ if (shouldParkAfterFailedAcquire(p, node) /*4、当前线程可以挂起,则挂起线程,并且线程被unpark()或者interrupt()唤醒,检查线程的状态*/ && parkAndCheckInterrupt()) { interrupted = true; } } }finally{
if (failed) { /*5、阻塞获取同步资源的时候,发生了异常,将当前Node节点从同步队列中出队*/ cancelAcquire(node); } }
acquireQueued(Node)这个方法的目的就是使得当前线程阻塞,等待获取资源,获取成功之后才返回。那么如何阻塞呢?看了上面的代码,读到这里我想大家心里都有了答案:要么自旋,要么主动park(),此方法中采用了这两种方式结合的方法,其大致的执行流程如下:
1、自旋,首先当前节点的前继节点是头结点(走到这里来了,说明前继节点正在占用共享资源,有可能在这个过程中正好释放了),那么我们当前线程就有资格去尝试获取共享资源,如果获取共享资源成功,则结束自旋阻塞;
2、如果前继节点不是头结点,或者争抢共享资源失败,那么我们调用shouldParkAfterFailedAcquire(Node,Node)方法,判断是否可以将此线程暂时挂起(不能无限制地自旋,会造成CPU占用率飙升,安全的做法是自旋找到一个合适的点,将当前线程park()阻塞挂起);
3、当前挂起之前,要向前寻找能将它唤醒的前继节点,待前继节点释放资源之后,unpark()唤醒当前被阻塞的节点;
4、线程已经到达安全点,可以调用parkAndCheckInterrupt()阻塞并等待唤醒,唤醒之后再检查下,阻塞的这个过程中是否发生了线程中断请求,由于这个阻塞过程是不响应线程中断的,所以需要将这个中断请求的状态传播出去;
5、阻塞获取同步资源的时候,发生了异常,取消当前线程的在同步队列中的排队;
shouldParkAfterFailedAcquire(Node, Node )方法:
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) { int ws = pred.waitStatus; /*判断前驱结点的状态,只有前驱结点的状态为SIGNAL,后继节点才能被唤醒,所以其可以安心地挂起来了*/ if (ws == node.waitStatus) { return true; } /*ws>0表示前驱结点中的线程已经被取消调度了,则认为其是无效节点,继续向前查找,直至找到有效状态的节点*/ if (ws > 0) { do { node.prev = pred = pred.prev; } while (pred.waitStatus > 0); pred.next = node; }else { /*前驱结点状态正常,将前驱结点状态设置为SIGNAL,则前驱结点释放资源的时候,就可以尝试唤醒当前这个后继节点了*/ compareAndSetWaitStatus(pred, ws, Node.SIGNAL); } return false; }
这个方法是在自旋中用来判断是否可以将线程安全地park(),阻塞自旋的,那么何时才能将当前线程安全地挂起呢?回想下,我们之前提到的节点的五种状态中有一种SIGNAL,表示当前节点的线程释放资源,可以唤醒后继节点,所以我们就在线程挂起之前找到它的有效的前继结点,将它的waitStatus状态设置为SIGNAL,就可以保证前继节点释放资源之后,当前节点中的线程就可以被及时地唤醒,结束阻塞了,当前线程挂起之前的准备工作都做完了,那么接下来就需要调用parkAndCheckInterrupt()方法,进行线程的挂起了。
parkAndCheckInterrupt()方法:
private final boolean parkAndCheckInterrupt() { LockSupport.park(this); return Thread.interrupted(); }
执行到这里了,说明线程可以阻塞,调用park()方法阻塞线程,等待其他线程中unpark()或者interrupt()唤醒次线程,唤醒之后执行Thread.interrupted()方法,检测阻塞过程中的线程请求中断,进入下次自旋,尝试获取共享资源。如果在阻塞获取资源的过程中,发生了异常,failed = true,则执行finally中cancelAcquire(Node)方法,取消当前节点中线程的调度。
上面说了分析了这么多,只说了线程间的获取资源时候的同步问题,那么线程间的协作在哪里体现呢?答案就是在acquireQueued(Node,int)方法中的finally块中,线程在阻塞获取共享资源的时候发生了异常,就会执行此方法将此节点从同步队列中出队,下面我们来分析下cancelAcquire(Node)方法:
cancelAcquire(Node)方法:
1 private void cancelAcquire(Node node) { 2 //当前节点为空,则说明当前线程永远不会被调度到了,所以直接返回 3 if (node == null) { 4 return; 5 } 6 7 /** 8 * 接下来将点前Node节点从同步队列出队,主要做以下几件事: 9 * 1、将当前节点不与任何线程绑定,设置当前节点为Node.CANCELLED状态; 10 * 2、将当前取消节点的前置非取消节点和后置非取消节点"链接"起来; 11 * 3、如果前置节点释放了锁,那么当前取消节点承担起后续节点的唤醒职责。 12 */ 13 14 //1、取消当前节点与线程的绑定 15 node.thread = null; 16 17 //2、找到当前节点的有效前继节点pred 18 Node pred = node.prev; 19 while (pred.waitStatus > 0) { 20 //为什么双向链表从后往前遍历呢?而不是从前往后遍历呢? 21 node.prev = pred = pred.prev; 22 } 23 //用作CAS操作时候的条件判断需要使用的值 24 Node predNext = pred.next; 25 26 //3、将当前节点设置为取消状态 27 node.waitStatus = Node.CANCELLED; 28 29 /** 30 * 接下来就需要将当前取消节点的前后两个有效节点"链接"起来了,"达成让当前node节点出队的目的"。 31 * 这里按照node节点在同步队列中的不同位置分了三种情况: 32 * 1、node节点是同步队列的尾节点tail; 33 * 2、node节点既不是同步队列头结点head的后继节点,也不是尾节点tail; 34 * 3、node节点是同步队列头结点head的后继节点; 35 */ 36 37 //1、node是尾节点,并且执行过程中没有并发,直接将pred设置为同步队列的tail 38 if (node == tail && compareAndSetTail(node, pred)) { 39 /* 40 * 此时pred已经设置为同步队列的tail,需要通过CAS操作,将pred的next指向null,没有节点再引用node,就完成了node节点的出队42 */ 43 compareAndSetNext(pred, predNext, null); 44 }else { 45 /* 46 * 2、node不是尾节点,也不是头结点head的后继节点,那么当前节点node出队以后,node的有效前继结点pred, 47 * 就有义务在它自身释放资源的时候,唤醒node的有效后继节点successor,即将pred的状态设置为Node.SIGNAL; 48 */ 49 int ws; 50 //能执行到这里,说明当前node节点不是head的后继节点,也不是同步队列tail节点 51 if (pred != head && 52 ((ws = pred.waitStatus) == Node.SIGNAL || 53 //前继节点状态虽然有效但不是SIGNAL,采用CAS操作设置为SIGNAL确保后继有效节点可以被唤醒 54 (ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) && 55 pred.thread != null) { 56 Node next = node.next; 57 //只负责唤醒有效后继节点 58 if (next != null && next.waitStatus <= 0) { 59 /** 60 * 下面这段代码相当于将pred-->next,我们提到这个同步队列是个双向队列,那么pred<--next这是谁执行的呢? 61 * 答案是其他线程:其它线程在后序的获取共享资源在同步队列中阻塞的时候,调用shouldParkAfterFailedAcquire()方法, 62 * 从后向前遍历队列,寻找能唤醒它的有效前继节点,当找到node的时候,因为它的状态已经是Node.CANCELLED,所以会忽略node节点, 63 * 直到遍历到有效前继节点pred,将next.prev执行pred,即next--->pred,没有节点再引用node节点,所以node节点至此才完成出队。 64 */ 65 compareAndSetNext(pred, predNext, next); 66 } 67 }else { 68 //3、说明node节点是同步队列head的后继节点,调用unparkSuccessor(Node)唤醒其他线程,达到让当前node"出队"。 69 unparkSuccessor(node); 70 } 71 72 node.next = node;//help GC 73 } 74 }
这个方法的中的注释写的很详细了,线程间的协作主要体现在第65行的代码中,原因也在注释中写明了,就不再赘述了。
还有一个非常关键的问题就是:为什么我们在遍历同步队列的时候是从尾部向前遍历,而不是从头部向尾部遍历呢?我们可以回过头去看看入队时候的enq(Node)方法:
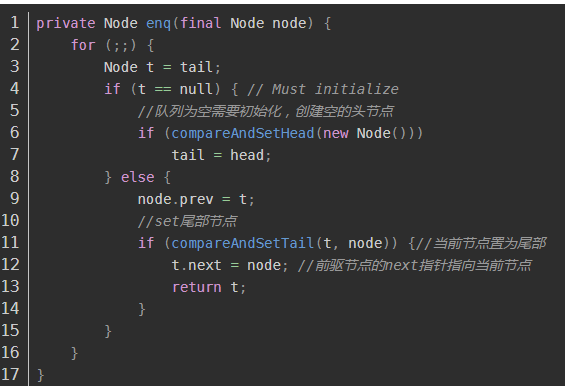
关键在11行-14行这部分代码中,11行保证了多线程环境下,采用自旋可以将当前线程顺利地加入到同步队列的尾部。
假如有线程A执行了满足了if条件,成功将线程A放入了tail节点,还未执行到12行,t.next = null,此时发生了线程切换执行B线程,B线程也执行了此方法,并且执行完毕,尾插法会将B线程节点追加到A线程节点之后,这时候又有个C线程执行了遍历操作,假设从队头向队尾遍历,遍历到A节点时,那么可能会出现t.next = null这种情况,停止遍历,漏掉B线程节点的情况,而采用从同步队列的尾部向头部遍历则可以避免这个问题,其最根本的原因在于:node.prev = t;先于CAS执行,也就是说,你在将当前节点置为尾部之前,就已经把前驱节点赋值了,自然不会出现node.prev==null的情况。
下个问题就是unparkSuccessor(node)方法的原理是什么呢?
unparkSuccessor(node)方法:
1 private void unparkSuccessor(Node node) { 2 /* 3 * If status is negative (i.e., possibly needing signal) try 4 * to clear in anticipation of signalling. It is OK if this 5 * fails or if status is changed by waiting thread. 6 */ 7 //在这里,这个节点其实是同步队列的头结点,头结点唤醒后继节点之后,使命就完成了,所以应该将其状态置为0 8 int ws = node.waitStatus; 9 if (ws < 0) 10 compareAndSetWaitStatus(node, ws, 0); 11 12 /* 13 * Thread to unpark is held in successor, which is normally 14 * just the next node. But if cancelled or apparently null, 15 * traverse backwards from tail to find the actual 16 * non-cancelled successor. 17 */ 18 Node s = node.next; 19 //因为s.next相当于从同步队列的头部遍历所以可能会出现s == null的情况,上面分析过原因,不再赘述了。 20 if (s == null || s.waitStatus > 0) { 21 s = null; 22 //从同步队列的尾部向前遍历,找到当前node节点(头结点)的最近的有效后继节点 23 for (Node t = tail; t != null && t != node; t = t.prev) 24 if (t.waitStatus <= 0) 25 s = t; 26 } 27 28 /** 29 * 找到最近的有效后继节点,则唤醒后继节点中的线程在parkAndCheckInterrupt()方法上的阻塞,去尝试竞争共享资源, 30 * 这就体现了线程之间的协作,而在这个竞争的过程中也会忽略这个Node.CANCELLED状态的节点,这当前node节点也就放弃了竞争共享资源的机会,相当于出队了。 31 */ 32 if (s != null) 33 LockSupport.unpark(s.thread); 34 }
以上就是对unparksuccessor(Node)方法的简单分析了。再回过头来,我们在cancelAcquire(Node)将当前要取消Node按照位置关系分为了三种,为什么我们会忽略head位置呢?
从setHead()的实现以及所有调用的地方可以看出,head指向的节点必定是拿到锁(或是竞争资源)的节点,而head的后继节点则是有资格争夺锁的节点。因为独占锁只能被一个线程持有,head的后继节点都还没有获取到,那么head后继的后继的节点,自然就应该是阻塞着的了。head指向的节点,曾经关联的线程必定已经获取到资源,在执行了,所以head无需再关联到该线程了。head所指向的节点,也无需再参与任何的竞争操作了。现在再来看node出队时的分类,就好理解了。head既然不会参与任何资源竞争了,自然也就和cancelAquire()无关了。
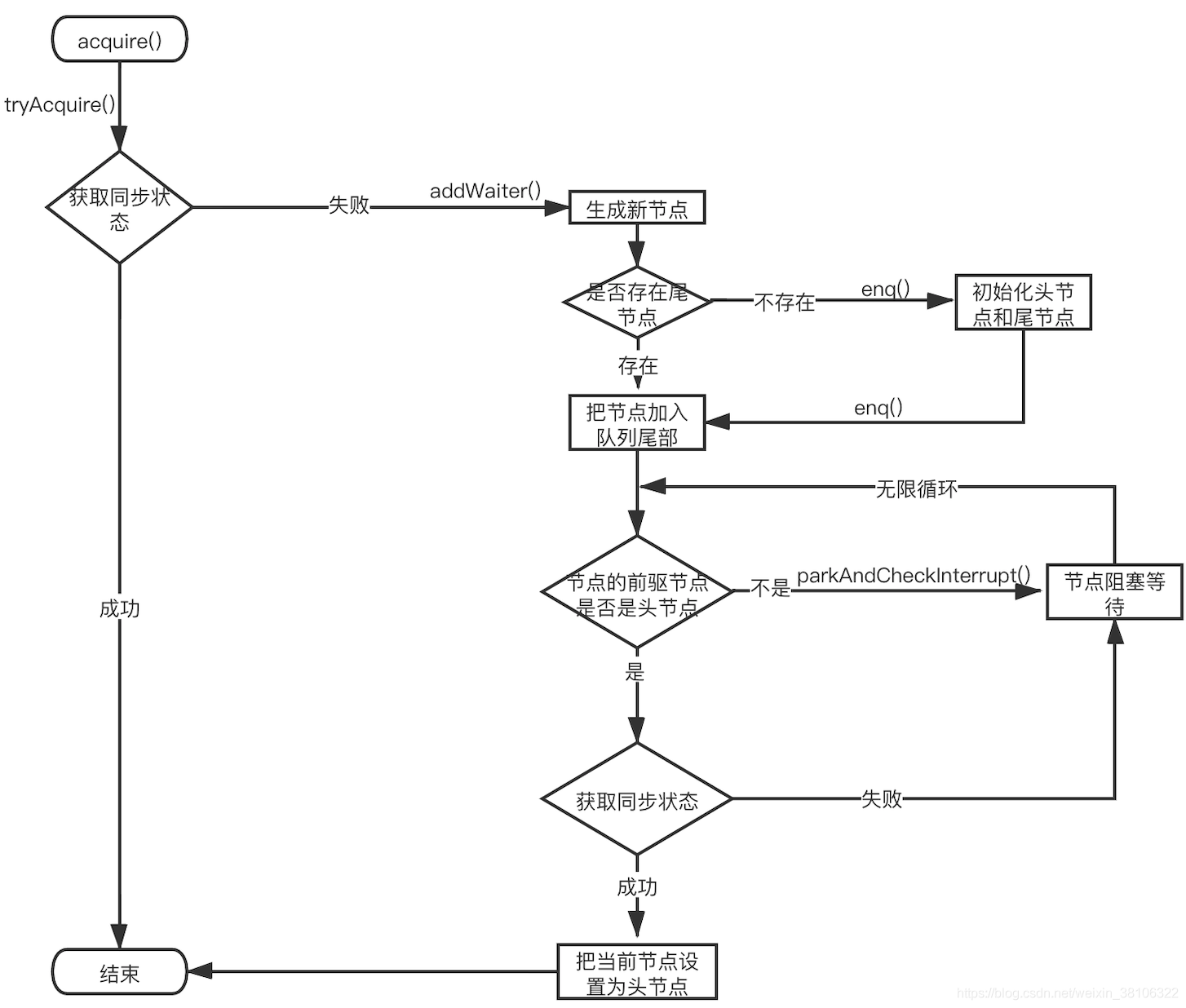
仔细分析这个acquire()方法流程非常复杂,找了个一张网上一个博主画的流程图非常棒,此图详细地概括了AQS中独占锁的实现原理,这里借鉴一下,请大家参考:
总结以下,其实AQS中获取锁的流程可以简化如下:
while(不满足获取锁的条件){
将当前线程包装成Node节点,加入到同步队列中;
if(当前线程可以阻塞){
阻塞当前线程等待其它线程唤醒;
}
}
将当前节点从同步队列中移除;
AQS中的实现比这个要复杂一些,但是大体流程上还是一样的。
好了文章就写到这里了,鉴于水平有限,有说的不对的地方欢迎大家批评指正。
参考文章地址:
1、https://blog.csdn.net/weixin_38106322/article/details/107121149
2、https://www.jianshu.com/p/01f2046aab64
3、https://blog.csdn.net/foxException/article/details/108917338
本文来自博客园,作者:一只烤鸭朝北走,仅用于技术学习,所有资源都来源于网络,部分是转发,部分是个人总结。欢迎共同学习和转载,转载请在醒目位置标明原文。如有侵权,请留言告知,及时撤除。转载请注明原文链接:https://www.cnblogs.com/wha6239/p/17122948.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号