

医学图像重建 (Medical Image Reconstruction) 学习笔记: (三) 扇形束图像重建
主要参考资料为 《医学图像重建入门》(曾更生,2009)
1. 简介
主要介绍扇形束成像的重建算法,包括 *** 等。
在平行光束成像中,我们基于中心切片定理推导出了一些图像重建算法。然而,在扇形束成像中,并没有相应的中心切片定理。通常采用的方法为:把扇形束成像问题转化成平行光束成像问题,然后把平行光束图像重建的算法修正一下,用于解决扇形束的成像问题。
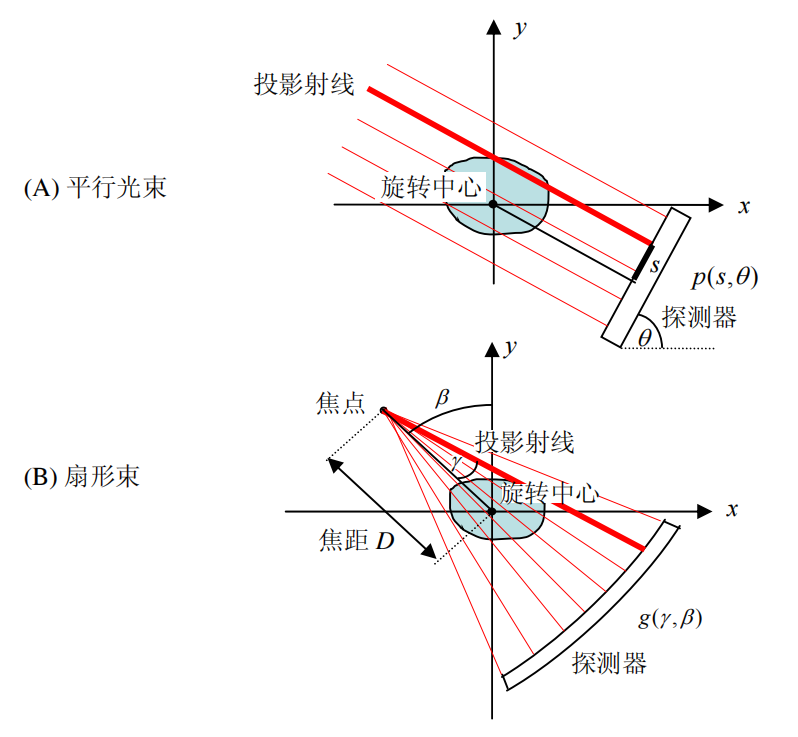
2. 扇形束成像的几何描述及其点扩散函数
在 X 光 CT 领域,其光源多为扇形束的点光源。与平行光束的对比如下:
与之前章节相同,我们默认假设探测器是均匀地绕物体转动,且数据采样的角度区间也是均匀的。在这个假设条件下,平行光束的投影/反投影的点扩散函数(PSF)是移动不变的。
在用平行光束成像的情形,为了求反投影在点
相似地,在用扇形束成像的情形,为了求反投影在点
可以证明,如果扇形束焦点的轨迹是一个完整的圆圈,所得到的投影/反投影的点扩散函数(PSF)是移动不变的。而且,这个投影/反投影的点扩散函数与平行光束成像情形的投影/反投影的点扩散函数是一样的。
(其实这里还是没有特别理解这个“点扩散函数”是什么意思。)
设原本的图像为
其中,“**” 表示二维卷积。在傅里叶变换领域,原本图像的傅里叶变换
这是因为
我们已经知道,对反投影后的图像
最后,对
(其实,还是没有特别理解上述过程。)(先做反投影、后做滤波,这很容易理解。但是,滤波函数为什么是这样的形式呢,为什么和平行光束相同呢?)
3. 平行光束算法到扇形束算法的转换
下面对之前介绍的平行光束算法重新推导,将其转化应用到扇形束成像中。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 25岁的心里话
· 闲置电脑爆改个人服务器(超详细) #公网映射 #Vmware虚拟网络编辑器
· 零经验选手,Compose 一天开发一款小游戏!
· 通过 API 将Deepseek响应流式内容输出到前端
· AI Agent开发,如何调用三方的API Function,是通过提示词来发起调用的吗