
医学图像重建 (Medical Image Reconstruction) 学习笔记: (二) 平行光束图像重建
主要参考资料为 《医学图像重建入门》(曾更生,2009)
1. 简介
主要介绍平行光束/射线的图像重建算法,包括 *** 等。
2. 傅里叶变换与希尔伯特变换
2.1 傅里叶变换基本概念理解
对于一个给定的函数 \(p(x)\) ,它总能用不同频率 \(\omega\) 的正弦函数和余弦函数的加权和来表示。这个加权和的权函数记为 \(P(\omega)\) 。这就是傅里叶变换的理论基础。
傅里叶变换的本质是将一个函数按照“进制”分解。比如一堆苹果,它的个数总能以不同的进制下的加权和来表示。比如132个苹果,在十进制下,为 1 个“百(十的二次方)” + 3 个“十(十的一次方)”和 2 个“一(十的零次方)” 表示;在七进制下,为 2 个“七的二次方)”和 4 个“七(七的一次方)” 和 6 个“一(七的零次方)”表示。
(注:进制的形式可以有任意多个形式,但十进制是最便利的之一。基于十进制,形成了诸多“漂亮”的理论形式。同样的道理,“傅里叶变换”也可以有任意多种形式,只是,不同频率 \(\omega\) 的正弦函数和余弦函数的形式下,可以形成诸多最简洁、漂亮的理论公式。因此,这种最有效的变换,就是 傅里叶变换。仍记得在学《量子力学》的时候,某些情况下,应用空间变换/基变换,能够将一些理论公式转化成非常简洁的形式。在此时,也同样是用某些函数作为空间的基向量。同样的道理,我们也是将傅里叶变换中的正弦/余弦函数作为包含任意函数的空间的基向量,那么,任意函数都能记作该空间中的一个点 \(P(\omega)\) 。以上为个人理解。)
(注2:空间的概念是非常神奇的。任何事物(包括函数)都可以对应到空间中的一个点(坐标)。傅里叶变换,其本质就是已知某函数之后,通过公式计算得到“空间”中的坐标值 \(P(\omega)\) 。就好比知道一个点,得到其在笛卡尔空间中的坐标(空间位置)。)
2.2 傅里叶变换与卷积的数学表达
一维傅里叶变换可定义为:
相应的一维傅里叶反变换就是:
两个函数 \(f\) 和 \(g\) 的卷积的定义是:
若傅里叶变换的算子记为 \(\boldsymbol{F}\),傅里叶卷积定理可表述为
(傅里叶卷积的本质是??)
2.3 希尔伯特变换与有限希尔伯特变换
傅里叶变换可以把一个实值函数变换成复值函数。而希尔伯特变换只能把一个实值函数变换成另一个实值函数。
用 \(\boldsymbol{H}\) 表示希尔伯特变换的算子。对一个函数 \(f\) 连着实施两次希尔伯特变换就会把这个函数还原,但差一个负号。即
此外,希尔伯特变换还有如下性质:一个实值函数与其希尔伯特变换是正交的。设 \(g = \boldsymbol{H}f\) ,那么,
(其他性质待补充。)
3. 中心切片定理
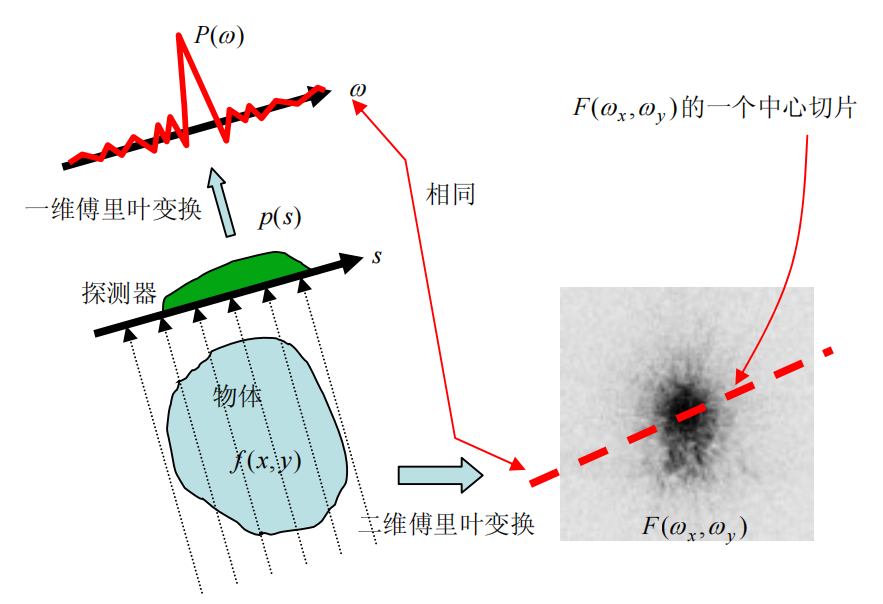
中心切片定理是断层成像的基础理论。也被程为投影切片定理和傅里叶中心切片定理。该定理指出:二维函数 \(f(x, y)\) 的投影 \(p(s)\) 的傅里叶变换 \(P(\omega)\) 等于函数 \(f(x, y)\) 的傅里叶变换 \(F(\omega_x, \omega_y)\) 沿与探测器平行的方向过原点的片段。
该定理也非常直观,如下图*所示。
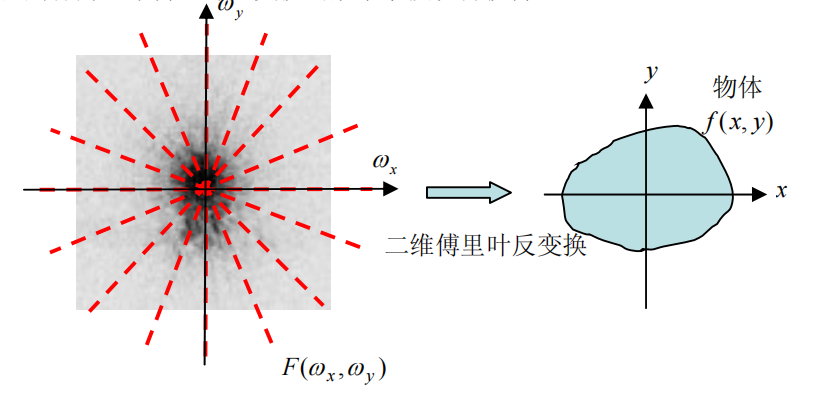
通过观察,我们发现,探测器绕物体旋转 \(180^{\circ}\) 就能探测到完整的傅里叶变换函数 \(F(\omega_x, \omega_y)\) 。如下图*所示。
4. 重建算法
由中心切片定理可知,二维函数 \(f(x, y)\) 的投影 \(p(s)\) 的傅里叶变换 \(P(\omega)\) 等于函数 \(f(x, y)\) 的傅里叶变换 \(F(\omega_x, \omega_y)\) 沿与探测器平行的方向过原点的片段。
换句话说,我们已知各个角度下的投影函数(探测器的值),做傅里叶变换,然后拼接到一起,就能“凑”出二维函数的傅里叶变换 \(F(\omega_x, \omega_y)\) 。那么,再做一次傅里叶反变换,就能得到二位函数 \(f(x, y)\) 了。
但是但是,如上图所示,简单的叠加(即反投影),会导致越靠近中心的位置越“过分叠加”。也就是低频的信息被过分加强了,而高频的信息则被过分减弱了。这将导致图像变得模糊。
做了反投影后,傅里叶空间的密度正比于 \(1/\sqrt{\omega^2_x + \omega^2_y}\)。因此,我们需要对傅里叶空间进行加权矫正,从而消除模糊效果。
第一个方案是,在 \(\omega_x - \omega_y\) 空间,把所得到的傅里叶“图像“乘以 \(\sqrt{\omega^2_x + \omega^2_y}\) ,这个乘积就是 \(F(\omega_x, \omega_y)\) 。对于 \(F(\omega_x, \omega_y)\) 做二维傅里叶反变换得到原本的图像 \(f(x, y)\)。
第二个方案是,把投影数据 \(p(s, \theta)\) 的一维傅里叶变换 \(P(\omega, \theta)\) 乘以 \(|\omega|\) 。然后,再对乘积 \(|\omega| P(\omega, \theta)\) 做一维傅里叶反变换。对投影数据做了处理(滤波)后,再把处理后(即滤波后)的数据做反投影(叠加)。这样就得到了重建的图像 \(f(x, y)\) 。本方案通常被称作 FBP (Filtered Backprojection) 算法,\(|\omega|\) 被称为斜坡滤波器。
下面,将具体介绍其中的各种,细节及技巧组合。每种算法都有其长处和短处。
4.1 方法1 (先滤波再反投影,Filtered Backprojection, FBP 算法)
在 Filtered Backprojection (FBP) 算法中,其具体步骤为:(i) 先求投影数据 \(p(s, \theta)\) 的傅里叶变换,得到 \(P(\omega, \theta)\) ;(ii) 接下来,将其乘以斜坡滤波器的传递函数 \(|\omega|\) ,得到 \(Q(\omega) = P(\omega, \theta) \times H(\omega)\) ;(iii) 求 \(Q(\omega, \theta)\) 的傅里叶反变换 \(q(s, \theta)\),(iv) 最后,进行反投影得到 \(f(x, y)\) 。
4.2 方法2
与上述方法相同,需要先进行滤波。只是,根据傅里叶变换理论,在 \(\omega\) 域做乘法等价于在 \(s\) 域做卷积。因此,我们不需要“傅里叶变换、相乘、傅里叶反变换”这样复杂,可以直接做卷积,如下:
这里,* 是卷积运算记号。\(h(s)\) 是卷积积分中的卷积核,它是 \(H(\omega) = |\omega|\) 的一维傅里叶反变换。
4.3 方法3 (求导、希尔伯特变换、反投影, Derivative,Hilbert transform,Backprojection,DHB 算法)
在方法1中,是在 \(\omega\) 域做乘法。其中,斜坡滤波器的传递函数可以拆分为:
(注,实际上就是分子、分母都添加了 \(i2\pi\) ,sgn 是表示正负号的。)
已知傅里叶变换的两个性质:(1)在傅里叶域(即 \(\omega\) 域)中乘以 \(i2\pi\omega\) 就相当于在空间域(即 \(s\) 域)中求导数;(2)函数 \(-i\text{sgn}(\omega)\) 的傅里叶反变换是 \(1/(\pi s)\) 。与 \(1/(\pi s)\) 做卷积又叫做希尔伯特变换。
由上述两个性质、以及传递函数的拆分,可以将上述 FBP 算法推导为:
其中,上述公式前两项的傅里叶反变换为:
上述公式的最后一项的傅里叶反变换为:
那么,上述 \(Q(\omega)\) 的傅里叶反变换为
也就是说,方法1中的算法还可以转化为求导和希尔伯特变换的组合来完成。
4.4 方法4
在上述方法中,都是先对投影数据(或其傅里叶变换)进行滤波,然后再反投影。我们当然也可以先做反投影,再做滤波。具体如下:(i) 反投影得到图像 \(b(x, y)\) ;(ii)对反投影得到的图像做二维傅里叶变换,得到 \(B(\omega_{x}, \omega_{y})\) ;(iii) 对 \(B(\omega_{x}, \omega_{y})\) 进行滤波,乘以斜坡滤波器的传递函数 \(|\omega| = \sqrt{\omega^{2}_{x} + \omega^{2}_{y}}\) ,得到 \(F(\omega_{x}, \omega_{y})\) ;(iv) 对其进行傅里叶反变换,得到 \(f(x, y)\) 。
4.5 方法5 (求导、反投影、希尔伯特变换, Derivative,Backprojection,Hilbert transform,DBH 算法)
在方法3中,是求导、希尔伯特变换、反投影三个过程。我们也可以改变一下他们的顺序,即:(i) 先求导,对投影数据 \(p(s, \theta)\) 以变量 \(s\) 求导(实际上是求偏导),得到 \(dp(s, \theta)/ds\) ;(ii) 对 \(dp(s, \theta)/ds\) 做 \(180^{\circ}\) 的反投影;(iii) 对反投影得到的图像逐行的做(一维的)希尔伯特变换。其方向是与探测器在 \(90^{\circ}\) 角的位置相平行。
(注:感觉跟方法3好像也没啥区别啊。)
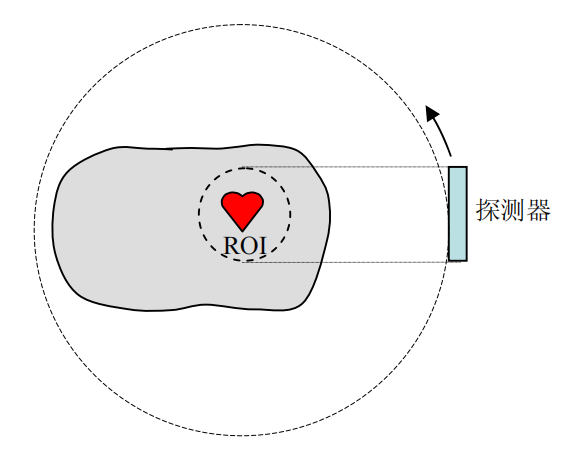
5. 利用截断的投影数据重建 ROI
如果我们只对图像中的一个小区域感兴趣,这个小区域叫 ROI (Rgeion of Interest,感兴趣区域)。在一些特定情形中,完全有可能用截断的(不完整的)投影数据做准确的 ROI 重建。在断层成像理论中,这个 ROI 重建问题叫做 内部重建问题(Interior Problem)。一般而言,内部重建问题只能得到近似解,只有在一些特殊条件下才能得到精确解。
内部重建问题可以通过 DBH (Derivative,backprojection,and the Hilbert transform 求导,反投影,及希尔伯特变换,上述方法5)算法来进行重建。(其中需要使用有限的希尔伯特发变换实现。)
(进一步的细节待补充。)
6. 小结
主要介绍了平行投影数据的重建算法。
