论文阅读笔记:Complementary Dynamics
论文题目:Complementary Dynamics 。It is a SIGGRAPH Asia 2020 paper by Jiayi Eris Zhang, Seungbae Bang, David I.W. Levin and Alec Jacobson. More details is in the Project Page
0. 摘要
论文提出了一种
1. 背景
为了实现****
2. 方法初探
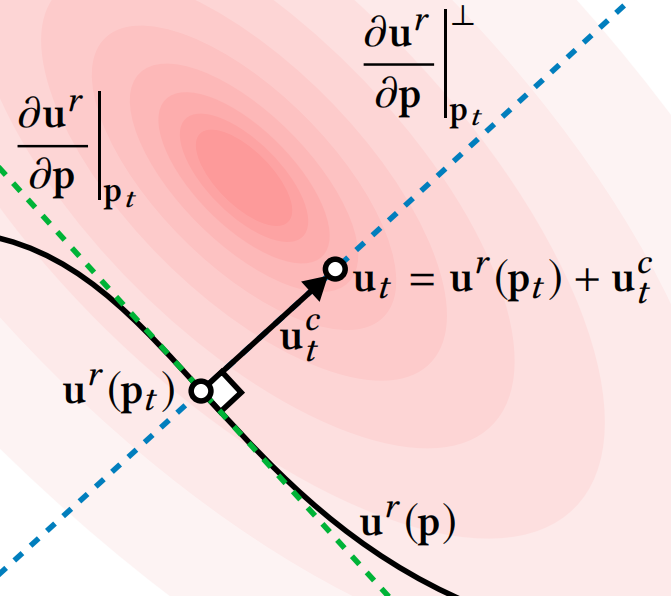
首先,定义仿真所涉及的变量。定义骨架参数 rig parameter 为 \(\boldsymbol{p} \in \mathbb{R}^{m}\) ;基于骨架蒙皮结构,由骨架偏移实现的网格节点位移为 \(\boldsymbol{u}^{r}\) ;基于本文所提出的方法,计算得到的 complementary displacement 网格节点位移为 \(\boldsymbol{u}^{c}\) ;在 \(t\) 时刻,网格节点的位移是两者相加的和,即
在软体对象的形变仿真中,可基于优化隐式积分方法进行求解计算。 \(t\) 时刻网格节点的位移为如下非线性最优化问题 non-linear optimization problem 的解,即
其中,\(E_{t}\) 是能量函数,包括了弹性势能 potential energy 、动能 momentum term ,外力做功 external work 等,即
其中,\(h > 0\) 是仿真时间步长;\(\boldsymbol{M} \in \mathbb{R}^{dn\times dn}\) 是质量矩阵 mass matrix 。
那么,在本论文的仿真计算中,complementary displacement 网格节点位移 \(\boldsymbol{u}^{c}_{t}\) 可通过求解上述优化问题得到,(注:\(\boldsymbol{u}^{r}_{t}\) 是已知量),即
思考:对上述问题直接求解,得到的结果将会是 \(\boldsymbol{u}^{c}_{t} = -\boldsymbol{u}^{r}_{t}\) ,也就是会 undo the rig displacements ,显然是不对的。因此,在仿真计算中,应加入适当约束,对 complementary displacement \(\boldsymbol{u}^{c}_{t}\) 施加一定的限制。
3. 骨架正交约束 Rig Orthogonality Constraints
接下来思考如何定义约束。换一个视角,如果 \(\boldsymbol{u}^{c}_{t}\) 和 \(\boldsymbol{u}^{r}_{t}\) 互不相关,那么,给定当前的骨架参数 \(\boldsymbol{p}_{t}\) ,对于任意有效的 \(\boldsymbol{u}^{c}_{t}\) 都应满足如下标准,即
其中,\(||\boldsymbol{x}||^2_{\boldsymbol{M}} = \boldsymbol{x}^T\boldsymbol{M}\boldsymbol{x}\) 。该约束将保证 \(\boldsymbol{u}^{c}_{t}\) 和 \(\boldsymbol{u}^{r}_{t}\) 互不相关。
(上面这一段的表述,还需要再整理,感觉没讲清楚)
有了上述条件,我们取优化目标函数的一阶导数,即
将上述公式拆分,得到
由于 \(\boldsymbol{u}^{r}(\boldsymbol{p}_t)\) 以及 \(\boldsymbol{u}^{c}_{t}\) 均与 \(\boldsymbol{p}\) 无关,对其偏导数为零,上述公式进一步简化为
其中,\(\boldsymbol{J}^T_t = \frac{\partial\boldsymbol{u}^{r}}{\partial\boldsymbol{p}}|^{T}_{\boldsymbol{p}_t}\) 为骨架的雅可比矩阵 rig Jacobian matrix 。
上述约束意味着,\(\boldsymbol{u}^{c}\) 与骨架蒙皮的位移正交互补: This constraint can read as requiring that \(\boldsymbol{u}^{c}\) lies in the orthogonal complement of the rig, first order.
4. 约束仿真 Constrainted Simulation
基于上述骨架正交约束,可以重新给出形变仿真的优化问题,即
对于上述优化问题的求解,通常可采用拉格朗日乘子法,即上述优化问题可转化为如下线性系统:
其中,\(\boldsymbol{Q} = \partial^2\Phi/\partial{\boldsymbol{u}^{C}}^2 + h^{-2}\boldsymbol{M}\),是与 Hessian 矩阵相关的项;\(\boldsymbol{l} = -\partial\Phi/\partial\boldsymbol{u}^{C} + \frac{\boldsymbol{M}}{h^2}(\boldsymbol{u}_{t}^{r} - \boldsymbol{u}_{t-h} - h\dot{\boldsymbol{u}}_{t-h}) + \boldsymbol{f}_{t}\),是 Gradient 相关的项;\(\boldsymbol{C} = \boldsymbol{J}^T_t\boldsymbol{M}\),是骨架 Jacobian 相关的项。
5. 优化问题求解 Newton-Raphson方法
采用拉格朗日乘子法对上述优化问题求解,最终转化为非线性方程组 \(\boldsymbol{Ax} = \boldsymbol{b}\) 。在本文中,采用了 Newton-Raphson 方法对该非线性方程组进行求解。结合 Newton-Raphson方法求解多元非线性方程组 中给出的介绍,求解流程如下:
1、初始化。计算 rig 分量 \(\boldsymbol{u}_t^{r}\),计算初始位移 \(\boldsymbol{u}^{(0)}\),complementary 分量为零,即 \(\boldsymbol{u}^{c(0)} = \boldsymbol{0}\) ;最大迭代次数为 \(N = 20\) ;置 \(k = 0\);精度要求为 \(\epsilon = 1e^{-6}\)
2、求解方程组 \(\boldsymbol{A}(\boldsymbol{x}^{(k)})\boldsymbol{d} = -\boldsymbol{F}(\boldsymbol{x}^{(k)})\)
注:Newton-Raphson方法求解多元非线性方程组参见 Newton-Raphson方法求解多元非线性方程组

 浙公网安备 33010602011771号
浙公网安备 33010602011771号