2D、3D 线性坐标系变换
坐标系
2D坐标系
左上坐标系
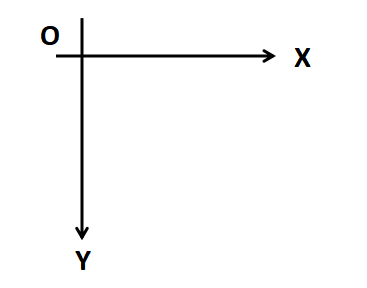
常用于图像处理。图像在显示器上显示,可以把图像看作矩阵,矩阵的每一个元素值对应图像同位置的像素值。
图像处理,比如旋转、缩放、平移等,都可以通过矩阵变换来实现。
正交直角坐标系
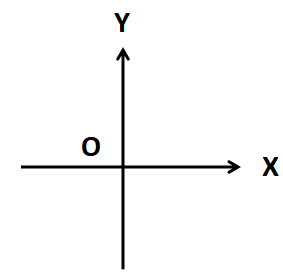
一般人眼习惯的坐标系。
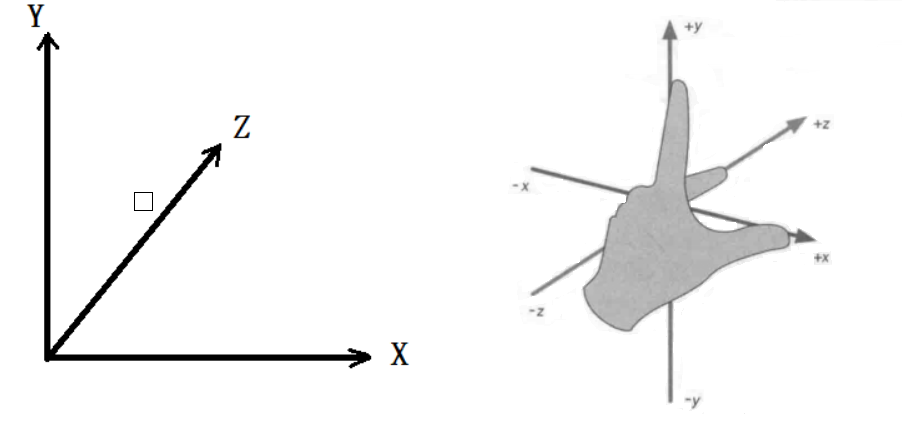
3D坐标系
空间直角坐标系
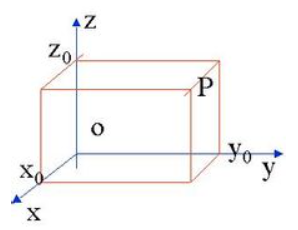
位于X,Y,Z轴的正半轴的卦限称为第一卦限。
右手坐标系
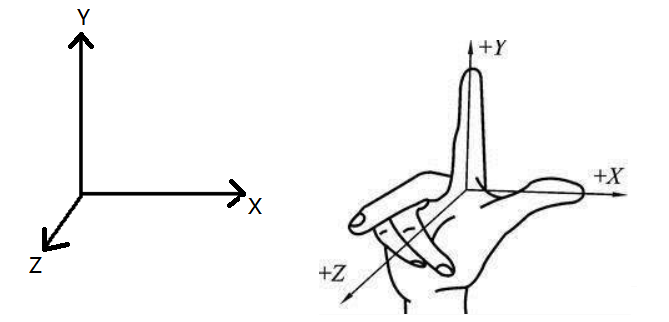
左手坐标系
线性转换
2D转换
任意坐标系的坐标转换,都可通过旋转Rotation、缩放Scaling、平移Translation等转换为线性变换。
旋转+缩放+平移
其中
Sx/Sy, x/y轴缩放比例;
,x/y轴旋转度数(顺时针);
Tx/Ty,x/y轴平移量(参考原点在新坐标系中的值);
比如,图像坐标系 转为 居中的直角坐标系表示。
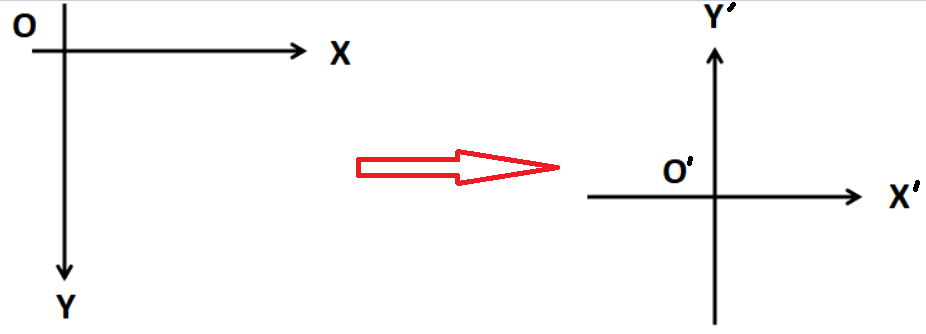
根据上述公式,确定相关参数,带入公式计算即可。
| 源坐标系 | 目标坐标系 | 备注 |
|---|---|---|
| 0 | X轴方向不变,即为X'轴 | |
| 180° | Y轴顺时针旋转180°变成Y' | |
| Sx | 1 | X轴没有缩放 |
| Sy | 1 | Y轴没有缩放 |
| Tx | 参考原点O在目标坐标系的X'轴上的值,其中width为图像的像素宽 | |
| Ty | 参考原点O在目标坐标系的Y'轴上的值,其中height为图像的像素高 |
源坐标系某一像素位置(x,y),转换后在目标坐标系中的位置x',y'的值分别为:
倾斜 Shearing
转换逻辑:旋转 -> 倾斜 -> 均匀缩放 -> 长宽比
其中
S, x/y轴统一缩放比例;
,x/y轴均匀旋转度数(顺时针);
A,纵横比(以x轴为单位,比如宽为1,y轴的相对值);
Q,倾斜角度数;
Tx/Ty,x/y轴平移量(参考原点在新坐标系中的值);
Matrix
System.Drawing.Drawing2D.Matrix,代表一个GDI矩阵,一般用在Windows窗体(Winform)中,展示几何变换。
System.Windows.Media也定义有Matrix,不过System.Windows命名空间中类一般用于WPF
在GDI+中,可以将仿射变换(旋转、放缩、平移)存储在Matrix中(3X3),如图所示复合变换的矩阵:
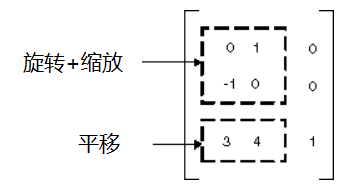
Matrix matrix = new Matrix(0, 1, -1, 0, 3, 4);
using System;
using System.Drawing;
using System.Drawing.Drawing2D;
using System.Linq;
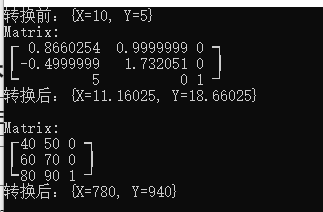
var pt = new PointF(10, 5);
Console.WriteLine("转换前:" + pt);
var matrix = new Matrix();
matrix.Rotate(30);
matrix.Scale(1, 2, MatrixOrder.Append);
matrix.Translate(5, 0, MatrixOrder.Append);
Console.WriteLine("Matrix: ");
PrintMatrix(matrix);
var arr = new PointF[] { pt };
matrix.TransformPoints(arr);
Console.WriteLine("转换后:" + arr[0]);
Console.WriteLine(Environment.NewLine + "Matrix: ");
matrix = new Matrix(40, 50, 60, 70, 80, 90);
PrintMatrix(matrix);
pt = new PointF(10, 5);
PointF[] arr2 = { pt };
matrix.TransformPoints(arr2);
Console.WriteLine("转换后:" + arr2[0]);
static void PrintMatrix(Matrix matrix)
{
var arr = matrix.Elements;
var pad = arr.Max(s => s.ToString().Length);
StringBuilder sb = new StringBuilder();
// 占位符
var pattern = $"{{0,{pad}}}";
sb.AppendLine($"┎ {string.Format(pattern, arr[0])} {string.Format(pattern, arr[1])} 0 ┑");
sb.AppendLine($"┃ {string.Format(pattern, arr[2])} {string.Format(pattern, arr[3])} 0 ┃");
sb.AppendLine($"┕ {string.Format(pattern, arr[4])} {string.Format(pattern, arr[5])} 1 ┘");
Console.Write(sb.ToString());
}
3D转换
3D线性转换相对复杂。
依据右手螺旋定则 x -> y -> z -> x......
单轴旋转
旋转Z轴
Z轴旋转,即Z轴不变,X轴向Y轴旋转。
旋转X轴
X轴旋转,即X轴不变,Y轴向Z轴旋转。
旋转Y轴
Y轴旋转,即Y轴不变,Z轴向X轴旋转。
缩放
倾斜
以X轴为基准,在Y轴、Z轴上拉伸。
其中,dy是Y轴上的拉伸比,dz是Z轴上的拉伸比。
任意轴旋转
绕任意经过原点的轴进行旋转
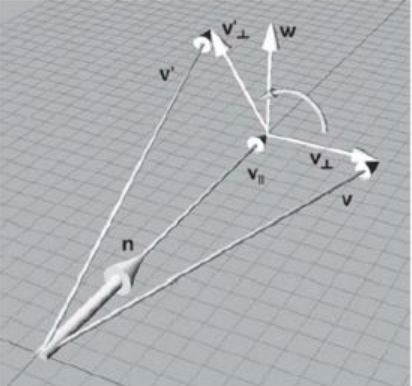
如图所示,绕N轴旋转,向量n的旋转结果为:



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具
2020-08-11 Task的使用注意事项
2020-08-11 专用线程Thread、线程池ThreadPool、多线程、异步Async