Spectral Normalized Markovian Discriminator(SNPatchGAN)[光谱归一化马尔科夫判别器]
马尔可夫判别器(PatchGAN)
概念
- 马尔可夫判别器是判别模型的一种。
- 基于
CNN的分类模型有很多种,很多网络都是在最后引入了一个全连接层,然后将判别的结果输出(输出结点)。 - 马尔可夫判别器则是不一样,直观来看,它完全由卷积层构成,最后输出的是一个n*n的矩阵,最后取输出矩阵的均值作为
True/False的输出。 - 事实上,输出矩阵中的每一个输出,代表着原图中一个感受野,对应了原图的一片
(patch),而具有这样结构的GAN被称为PatchGAN。
优点应用
-
目前来看,在图像风格迁移领域中,我们这里沿用
Gatys论文中关于风格迁移的想法,即风格迁移分为两部分:内容部分和纹理部分。 -
内容部分是指生成图像和原图像在内容(语义)上的相似性;
- 纹理部分是指生成图像和目标图像在纹理上的相似性。
- 马尔可夫判别器对于风格迁移中的超高分辨率、图片清晰化有一定的高分辨率、高细节的保持。
-
目前,马尔可夫判别器用于
Pix2Pix和CycleGAN等GAN网络中。
感受域计算
- 每一层感受域的计算公式为:
input_size = (output_size-1)*k_stride+k_size- 感受域:输出结点(输出网络中的每个结点)对输入网络的感受野的范围(可以从输出网络大小反推感受野的大小);
- input_size:为输出结点感受域的大小;
- k_stride:卷积核的移动步长;
- k_size:输入输出之间卷积核的大小;
- 以之前分析的
CycleGAN代码中的马尔可夫判别器为例: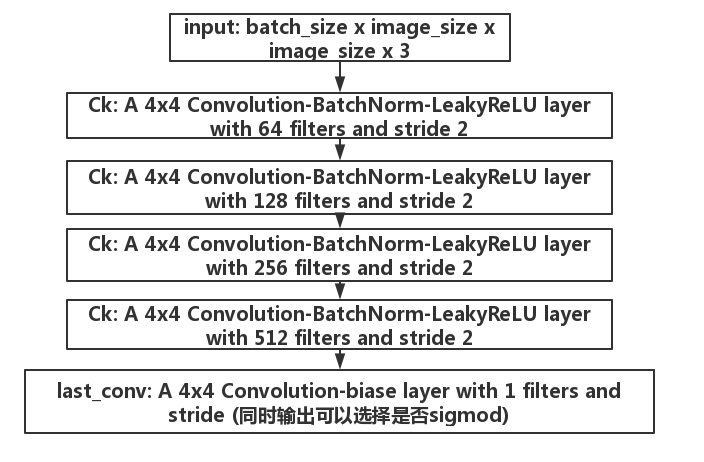
last_conv输出(k_stride=1)- 假设其中一个节点,即
output_size=1,计算得到CK4的大小(input_size)为4; - 同理,假设
CK4_size = 4,则CK3_size = (4-1)*2+4=10; - 同理,
CK2_size = (10-1)*2+4=22; - 同理,
CK1_size = (22-1)*2+4=46; - 同理,
input = (46-1)*2+4=46,即input的感受域大小为94;
- 假设其中一个节点,即
- 参考博客:博客1、博客2、博客3包括实现代码、更具体
光谱归一化马尔科夫判别器
待整理

 浙公网安备 33010602011771号
浙公网安备 33010602011771号