
GD32F30x_AD5693R驱动程序
一、工具
1、硬件:GD32F30x系列单片机
2、编译环境:KEIL
3、AD5693R芯片:AD5693RxRM
二、芯片简介
AD5693R是一款16位单通道缓冲电压输出DAC,内部集成默认2.5 V基准电压源,内部基准电压源默认使能 ,提供2ppm/℃漂移。输出范围可编程设置为0 V至 Vref或者0V至2xVref。数据通过I2C串行接口以24位字格式写入,支持标准(100kHz)和快速(400kHz)数据传输模式,不支持10位寻址和广播寻址。
输出电压计算公式:
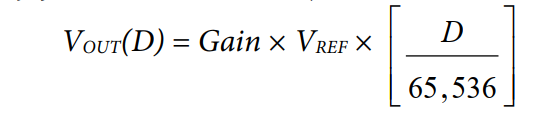
D是载入DAC寄存器的二进制编码的十进制等效值。
Gain是输出放大器的增益,默认设置为1。 也可以将该增益设置为2。
Vref是参比电压,默认使用内部2.5V电压。
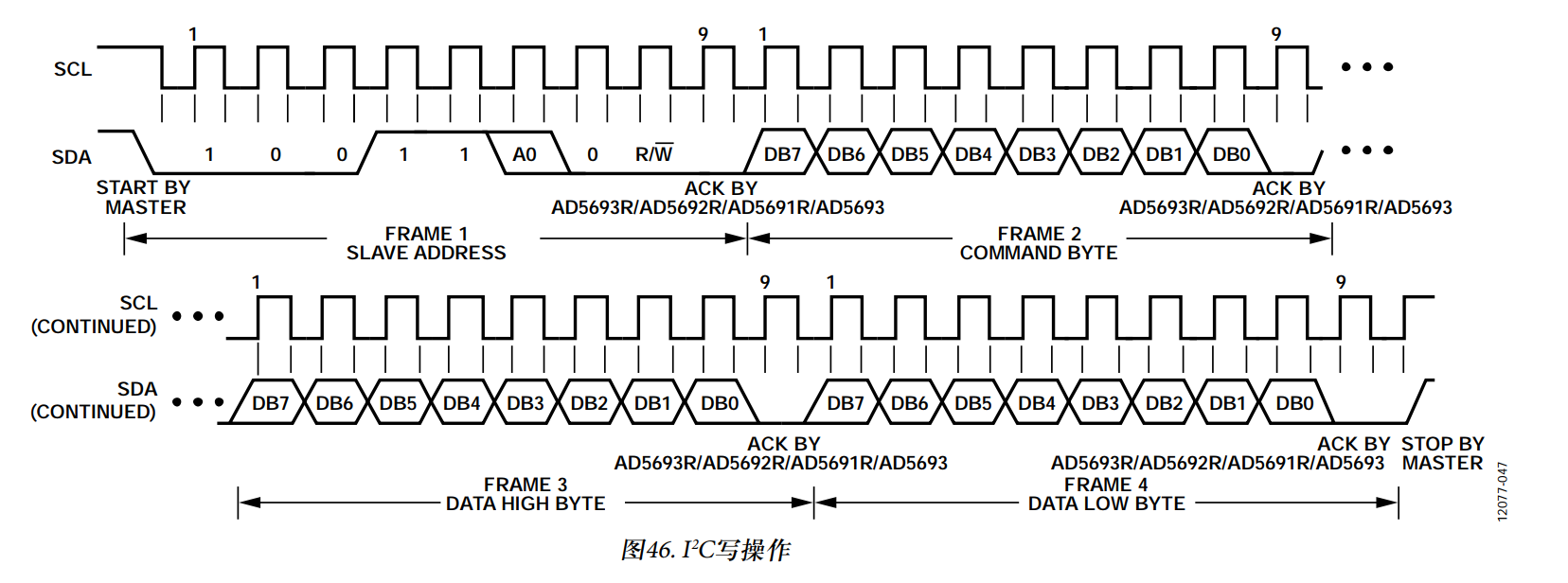
三、芯片I2C协议
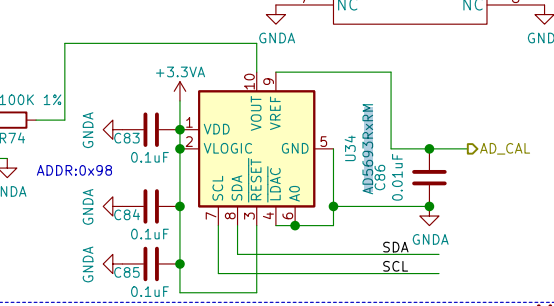
四、硬件电路
五、程序编写
I2C配置
- I2C引脚初始化
/** ***************************************************************************** * @Name : I2C1_GPIO_Configuration * @Brief : I2C1引脚初始化 ***************************************************************************** **/ void I2C1_GPIO_Configuration(void) { rcu_periph_clock_enable(RCU_GPIOB); rcu_periph_clock_enable(RCU_AF); gpio_init(GPIOB, GPIO_MODE_AF_OD, GPIO_OSPEED_50MHZ, GPIO_PIN_10 | GPIO_PIN_11); }
2. I2C外设配置
/** ***************************************************************************** * @Name : I2C1_Configuration * @Brief : I2C1配置 * @Input : * @Output : * @Return : ***************************************************************************** **/ void I2C1_Configuration(void) { I2C1_GPIO_Configuration(); rcu_periph_clock_enable(RCU_I2C1); i2c_clock_config(I2C1, 250000, I2C_DTCY_2);/*设置I2C频率*/ i2c_mode_addr_config(I2C1, I2C_I2CMODE_ENABLE, I2C_ADDFORMAT_7BITS, 0);/*设置I2C 地址长度*/ i2c_enable(I2C1); i2c_ack_config(I2C1, I2C_ACK_ENABLE);/*开启应答*/ }
3. I2C写
/** * @brief I2C1写函数 * @param addr设备地址 * @param pdata 数据指针 * @param data_length 数据长度 * @retval none * @author Mr.W * @date 2020-11-11 */ void i2c_write(uint8_t addr, uint8_t *pdata, uint32_t data_length) { uint32_t i; /* wait until I2C bus is idle */ while(i2c_flag_get(I2C1, I2C_FLAG_I2CBSY)); /* send a start condition to I2C bus */ i2c_start_on_bus(I2C1); /* wait until SBSEND bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_SBSEND)); /* send slave address to I2C bus */ i2c_master_addressing(I2C1, addr, I2C_TRANSMITTER); /* wait until ADDSEND bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_ADDSEND)); /* clear ADDSEND bit */ i2c_flag_clear(I2C1, I2C_FLAG_ADDSEND); /* wait until the transmit data buffer is empty */ while(!i2c_flag_get(I2C1, I2C_FLAG_TBE)); for(i = 0; i < data_length; i++){ /* data transmission */ i2c_data_transmit(I2C1, pdata[i]); /* wait until the TBE bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_TBE)); } /* send a stop condition to I2C bus */ i2c_stop_on_bus(I2C1); /* wait until stop condition generate */ while(I2C_CTL0(I2C1)&0x0200); }
4. I2C读
/** * @brief I2C1读函数 * @param addr设备地址 * @param pdata 数据指针 * @param data_length 数据长度 * @retval none * @author Mr.W * @date 2020-11-11 */ void i2c_read(uint8_t addr, uint8_t *pdata, uint32_t data_length) { uint32_t i; /* send a NACK for the next data byte which will be received into the shift register */ i2c_ackpos_config(I2C1, I2C_ACKPOS_NEXT); /* wait until I2C bus is idle */ while(i2c_flag_get(I2C1, I2C_FLAG_I2CBSY)); /* send a start condition to I2C bus */ i2c_start_on_bus(I2C1); /* wait until SBSEND bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_SBSEND)); /* send slave address to I2C bus */ i2c_master_addressing(I2C1, addr, I2C_RECEIVER); /* disable ACK before clearing ADDSEND bit */ i2c_ack_config(I2C1, I2C_ACK_DISABLE); /* wait until ADDSEND bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_ADDSEND)); /* clear ADDSEND bit */ i2c_flag_clear(I2C1, I2C_FLAG_ADDSEND); /* Wait until the last data byte is received into the shift register */ while(!i2c_flag_get(I2C1, I2C_FLAG_BTC)); for(i = 0; i < data_length; i++) { /* wait until the RBNE bit is set */ while(!i2c_flag_get(I2C1, I2C_FLAG_RBNE)); /* read a data from I2C_DATA */ pdata[i] = i2c_data_receive(I2C1); } /* send a stop condition */ i2c_stop_on_bus(I2C1); /* wait until stop condition generate */ while(I2C_CTL0(I2C1)&0x0200); i2c_ackpos_config(I2C1, I2C_ACKPOS_CURRENT); /* enable acknowledge */ i2c_ack_config(I2C1, I2C_ACK_ENABLE); }
AD5693R控制操作
ad5693r.c文件中基本包含了常用的功能函数,如下所示:
/* * ad5693r.c * * Created on: Nov 10, 2020 * Author: Mr.W */ #include "./ad5693r/ad5693r.h" #include <stdlib.h> #include "./i2c/bsp_i2c.h" /** * @brief AD5693R初始化 * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_init(void) { } /** * @brief Write to input shift register. * * @param command - Command control bits. * @param data - Data to be written in input register. * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_set_shift_reg(uint8_t command, uint16_t data) { uint8_t data_buff [3] = {0, 0, 0}; data_buff[0] = ((command & 0x0F) << 4); data_buff[1] = ((data & 0xFF00) >> 8); data_buff[2] = ((data & 0x00FF)&0xFF); i2c_write(0x98, data_buff, 3); } /** * @brief 写输入寄存器 * @param data - desired value to be written in register. * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_write_register(uint16_t data) { ad5693r_set_shift_reg(AD5693R_CTRL_WRITE, data); } /** * @brief 更新DAC寄存器 * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_update_register(void) { ad5693r_set_shift_reg(AD5693R_CTRL_UPDATE, 0); } /** * @brief 写入DAC寄存器 * @param data - Desired value to be written in register. * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_write_update_register(uint16_t data) { ad5693r_set_shift_reg(AD5693R_CTRL_WRITEUPDATE, data); } /** * @brief 设置工作模式 * @param mode - Power-down operation modes. * Accepted values: * 'AD5693R_PWRM_NORMAL' - Normal Mode * 'AD5693R_PWRM_1K' - Power-down mode 1kOhm to GND * 'AD5693R_PWRM_100K' - Power-down mode 100kOhm to GND * 'AD5693R_PWRM_THREESTATE' - Three-State * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_power_mode(uint8_t mode) { ad5693r_set_shift_reg(AD5693R_CMD_WR_CTRL_REG, AD5693R_CTRL_PWRM(mode)); } /** * @brief 软件复位 * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_software_reset(void) { ad5693r_set_shift_reg(AD5693R_CMD_WR_CTRL_REG, AD5693R_SW_RESET); } /** * @brief 设置内部基准电压启动(默认启动) * * @param value - The internal reference register value * Example : 'AD5693R_INTREF_EN' - enable internal reference * 'AD5693R_INTREF_DIS' - disable internal reference * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_internal_reference(uint8_t value) { ad5693r_set_shift_reg(AD5693R_CMD_WR_CTRL_REG, AD5693R_CTRL_INT_REF(value)); } /** * @brief 设置增益模式 * * @param value - Gain modes. * Accepted values: * Example : 'AD5693R_GB_VREF' - 0V to VREF * 'AD5693R_GB_2VREF' - 0V to 2xVREF * @return None. * @author Mr.W * @date 2020-11-11 */ void ad5693r_gain_mode(uint8_t value) { ad5693r_set_shift_reg(AD5693R_CMD_WR_CTRL_REG, AD5693R_CTRL_GM(value)); } /** * @brief 测试程序 * @return None. * @author Mr.W * @date 2020-11-11 */ static void ad5693r_delay_ms(uint32_t ms) { volatile uint32_t i, j; for(i = 0; i < ms; i++) { for(j = 110; j > 0; j--); } } void ad5686_test(void) { #if 1 uint16_t adc_value; float voltage = 0.2; adc_value = (uint16_t)((voltage*65536)/2.5); ad5693r_write_update_register(adc_value); #else uint16_t step; //Sample test program to output a triangular wave on DAC channels for (step = 0x0000; step < 0xFFFF; step = step+0x1000) { ad5693r_write_update_register(step); ad5693r_delay_ms(0xFFFF); } #endif }
ad5693r.h文件中的内容
/* * ad5693r.h * * Created on: Nov 10, 2020 * Author: Mr.W */ #ifndef AD5693R_H_ #define AD5693R_H_ #include <stdint.h> /* Control Bits */ #define AD5693R_CTRL_NOP 0 /* 无操作命令 */ #define AD5693R_CTRL_WRITE 1 /* 写输入寄存器命令 */ #define AD5693R_CTRL_UPDATE 2 /* 更新DAC寄存器命令 */ #define AD5693R_CTRL_WRITEUPDATE 3 /* 写入DAC寄存器命令 */ #define AD5693R_CMD_WR_CTRL_REG 4 /* 写控制寄存器命令 */ /********************** AD5693R Write Control Register Bits ********************/ #define AD5693R_CTRL_GM(x) (((((x) & 0x1) << 0) << 11) & 0xF800) #define AD5693R_CTRL_INT_REF(x) (((((x) & 0x1) << 1) << 11) & 0xF800) #define AD5693R_CTRL_PWRM(x) (((((x) & 0x3) << 2) << 11) & 0xF800) #define AD5693R_SW_RESET ((((0x1) << 4) << 11) & 0xF800) void ad5686_init(void); void ad5693r_set_shift_reg(uint8_t command, uint16_t data); void ad5693r_write_register(uint16_t data); void ad5693r_update_register(void); void ad5693r_write_update_register(uint16_t data); void ad5693r_power_mode(uint8_t mode); void ad5693r_software_reset(void); void ad5693r_internal_reference(uint8_t value); void ad5693r_gain_mode(uint8_t value); /* 测试函数 */ void ad5686_test(void); #endif /* AD5693R_H_ */
#enif

 浙公网安备 33010602011771号
浙公网安备 33010602011771号