
win7/win10+vs2015+pcl1.8.0详细配置方案;
参考网友的资料整理为更详细的解决方案
一、下载相关文件
1.下载PCL-1.8.0-AllInOne-msvc2015-win64.exe、属性表和PDB和测试pcd文件rabbit.pcd,其中,属性表可以不下载。
百度云链接:https://pan.baidu.com/s/1dFwDIQt 密码:mcvg
二、Windows7下安装步骤:
1.点击PCL-1.8.0-AllInOne-msvc2015-win64.exe一键安装,可以默认也可以自己选择安装路径,如本文所选择的路径为默认安装路径C:\Program Files;
2.在安装过程中,OpenNI2在安装时会弹出界面,选择目录C:\Program Files\PCL 1.8.0\3rdParty\OpenNI2;
3.等待一段时间,则安装完成。
注意事项:在安装点击“我接收(I)”之后弹出来的对话框中一定要选择第二项AddPCL to the system PATH for all users:(如图)
三、系统配置步骤
1.点击win7的控制面板->系统->高级系统设置->在系统属性的“高级选项”卡下点击“环境变量”;
2.在系统子菜单里面找到“Path”,如图:
3.点击编辑,添加如下:
;C:\Program Files\PCL 1.8.0\bin;C:\Program Files\PCL 1.8.0\3rdParty\FLANN\bin;C:\Program Files\PCL 1.8.0\3rdParty\Qhull\bin;C:\Program Files\PCL 1.8.0\3rdParty\OpenNI2\Tools;C:\Program Files\PCL 1.8.0\3rdParty\VTK\bin
注意这里的“ ; ”分号;
注意,第一项在“一键安装”时就已经添加。
4.重启电脑
四、VS2015工程配置步骤
1.打开VS2015,创建新的win32控制台工程,建好后将平台改成X64;
2.点击项目菜单的属性,如图:
3.在弹出的对话框中,

① 点击“包含目录”下拉箭头->编辑,添加文件路径:
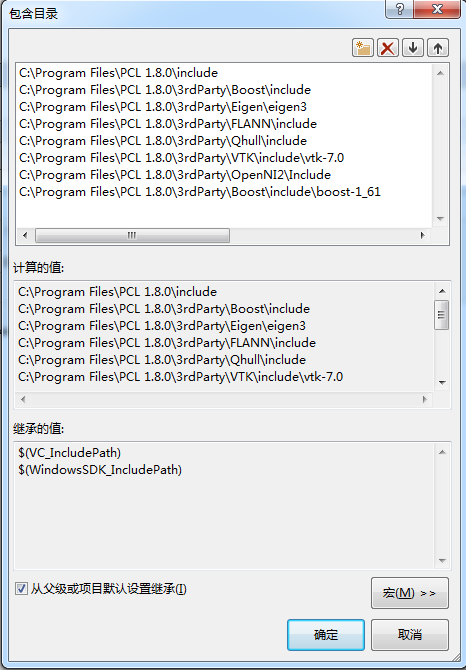
完成后点击确定;
②点击“库目录”下拉箭头->编辑,添加文件路径:

完成后点击确定;
4.点击连接器->输入->附加依赖项:
点击下拉箭头->编辑,添加下列文件:
pcl_common_release.lib
pcl_features_release.lib
pcl_filters_release.lib
pcl_io_ply_release.lib
pcl_io_release.lib
pcl_kdtree_release.lib
pcl_keypoints_release.lib
pcl_ml_release.lib
pcl_octree_release.lib
pcl_outofcore_release.lib
pcl_people_release.lib
pcl_recognition_release.lib
pcl_registration_release.lib
pcl_sample_consensus_release.lib
pcl_search_release.lib
pcl_segmentation_release.lib
pcl_stereo_release.lib
pcl_surface_release.lib
pcl_tracking_release.lib
pcl_visualization_release.lib
libboost_atomic-vc140-mt-1_61.lib
libboost_chrono-vc140-mt-1_61.lib
libboost_container-vc140-mt-1_61.lib
libboost_context-vc140-mt-1_61.lib
libboost_coroutine-vc140-mt-1_61.lib
libboost_date_time-vc140-mt-1_61.lib
libboost_exception-vc140-mt-1_61.lib
libboost_filesystem-vc140-mt-1_61.lib
libboost_graph-vc140-mt-1_61.lib
libboost_iostreams-vc140-mt-1_61.lib
libboost_locale-vc140-mt-1_61.lib
libboost_log-vc140-mt-1_61.lib
libboost_log_setup-vc140-mt-1_61.lib
libboost_math_c99-vc140-mt-1_61.lib
libboost_math_c99f-vc140-mt-1_61.lib
libboost_math_c99l-vc140-mt-1_61.lib
libboost_math_tr1-vc140-mt-1_61.lib
libboost_math_tr1f-vc140-mt-1_61.lib
libboost_math_tr1l-vc140-mt-1_61.lib
libboost_mpi-vc140-mt-1_61.lib
libboost_prg_exec_monitor-vc140-mt-1_61.lib
libboost_program_options-vc140-mt-1_61.lib
libboost_random-vc140-mt-1_61.lib
libboost_regex-vc140-mt-1_61.lib
libboost_serialization-vc140-mt-1_61.lib
libboost_signals-vc140-mt-1_61.lib
libboost_system-vc140-mt-1_61.lib
libboost_test_exec_monitor-vc140-mt-1_61.lib
libboost_thread-vc140-mt-1_61.lib
libboost_timer-vc140-mt-1_61.lib
libboost_unit_test_framework-vc140-mt-1_61.lib
libboost_wave-vc140-mt-1_61.lib
libboost_wserialization-vc140-mt-1_61.lib
flann.lib
flann_s.lib
flann-gd.lib
flann_cpp_s.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
qhull.lib
qhull_d.lib
qhullcpp_d.lib
qhullstatic.lib
qhullstatic_d.lib
qhullstatic_r.lib
qhullstatic_r_d.lib
qhull_p.lib
qhull_p_d.lib
qhull_r.lib
qhull_r_d.lib
vtkalglib-7.0.lib
vtkChartsCore-7.0.lib
vtkCommonColor-7.0.lib
vtkCommonComputationalGeometry-7.0.lib
vtkCommonCore-7.0.lib
vtkCommonDataModel-7.0.lib
vtkCommonExecutionModel-7.0.lib
vtkCommonMath-7.0.lib
vtkCommonMisc-7.0.lib
vtkCommonSystem-7.0.lib
vtkCommonTransforms-7.0.lib
vtkDICOMParser-7.0.lib
vtkDomainsChemistry-7.0.lib
vtkexoIIc-7.0.lib
vtkexpat-7.0.lib
vtkFiltersAMR-7.0.lib
vtkFiltersCore-7.0.lib
vtkFiltersExtraction-7.0.lib
vtkFiltersFlowPaths-7.0.lib
vtkFiltersGeneral-7.0.lib
vtkFiltersGeneric-7.0.lib
vtkFiltersGeometry-7.0.lib
vtkFiltersHybrid-7.0.lib
vtkFiltersHyperTree-7.0.lib
vtkFiltersImaging-7.0.lib
vtkFiltersModeling-7.0.lib
vtkFiltersParallel-7.0.lib
vtkFiltersParallelImaging-7.0.lib
vtkFiltersProgrammable-7.0.lib
vtkFiltersSelection-7.0.lib
vtkFiltersSMP-7.0.lib
vtkFiltersSources-7.0.lib
vtkFiltersStatistics-7.0.lib
vtkFiltersTexture-7.0.lib
vtkFiltersVerdict-7.0.lib
vtkfreetype-7.0.lib
vtkGeovisCore-7.0.lib
vtkhdf5-7.0.lib
vtkhdf5_hl-7.0.lib
vtkImagingColor-7.0.lib
vtkImagingCore-7.0.lib
vtkImagingFourier-7.0.lib
vtkImagingGeneral-7.0.lib
vtkImagingHybrid-7.0.lib
vtkImagingMath-7.0.lib
vtkImagingMorphological-7.0.lib
vtkImagingSources-7.0.lib
vtkImagingStatistics-7.0.lib
vtkImagingStencil-7.0.lib
vtkInfovisCore-7.0.lib
vtkInfovisLayout-7.0.lib
vtkInteractionImage-7.0.lib
vtkInteractionStyle-7.0.lib
vtkInteractionWidgets-7.0.lib
vtkIOAMR-7.0.lib
vtkIOCore-7.0.lib
vtkIOEnSight-7.0.lib
vtkIOExodus-7.0.lib
vtkIOExport-7.0.lib
vtkIOGeometry-7.0.lib
vtkIOImage-7.0.lib
vtkIOImport-7.0.lib
vtkIOInfovis-7.0.lib
vtkIOLegacy-7.0.lib
vtkIOLSDyna-7.0.lib
vtkIOMINC-7.0.lib
vtkIOMovie-7.0.lib
vtkIONetCDF-7.0.lib
vtkIOParallel-7.0.lib
vtkIOParallelXML-7.0.lib
vtkIOPLY-7.0.lib
vtkIOSQL-7.0.lib
vtkIOVideo-7.0.lib
vtkIOXML-7.0.lib
vtkIOXMLParser-7.0.lib
vtkjpeg-7.0.lib
vtkjsoncpp-7.0.lib
vtklibxml2-7.0.lib
vtkmetaio-7.0.lib
vtkNetCDF-7.0.lib
vtkNetCDF_cxx-7.0.lib
vtkoggtheora-7.0.lib
vtkParallelCore-7.0.lib
vtkpng-7.0.lib
vtkproj4-7.0.lib
vtkRenderingAnnotation-7.0.lib
vtkRenderingContext2D-7.0.lib
vtkRenderingContextOpenGL-7.0.lib
vtkRenderingCore-7.0.lib
vtkRenderingFreeType-7.0.lib
vtkRenderingImage-7.0.lib
vtkRenderingLabel-7.0.lib
vtkRenderingLOD-7.0.lib
vtkRenderingOpenGL-7.0.lib
vtkRenderingVolume-7.0.lib
vtkRenderingVolumeOpenGL-7.0.lib
vtksqlite-7.0.lib
vtksys-7.0.lib
vtktiff-7.0.lib
vtkverdict-7.0.lib
vtkViewsContext2D-7.0.lib
vtkViewsCore-7.0.lib
vtkViewsInfovis-7.0.lib
vtkzlib-7.0.lib
完成后点击确定;
注意:上面为在release下运行的文件,如果想在debug下运行,则将其中的release改成debug;
5.点击配置属性下的调试,右边有个环境项,把值设置为PATH=$(PCL_ROOT)bin;$(PCL_ROOT)3rdPartyFLANNbin;$(PCL_ROOT)3rdPartyVTKbin;$(PCL_ROOT)Qhullbin;$(PCL_ROOT)3rdPartyOpenNI2Tools;$(PATH)

6.点击配置属性下的CC++,点击它的子项预处理器,右边有个预处理器定义,添加上_SCL_SECURE_NO_WARNINGS 和 _CRT_SECURE_NO_WARNINGS。

7.点击配置属性下的CC++,常规

在附加包含目录中添加:C:\Program Files\PCL 1.8.0\3rdParty\Boost\include\boost-1_61

8.在属性管理器里点击项目,展开子项。

如果安装的是32位,点击选中开头为Debug的子项里右键,点击添加现有属性表,然后找到你下载的文件夹里的PCLDebug.props,添加上。点击选中开头为Release的子项里右键,点击添加现有属性表,然后找到你下载的文件夹里的PCLRelease.props,添加上。
如果安装的是64位,点击选中开头为Debug的子项里右键,点击添加现有属性表,然后找到你下载的文件夹里的PCLDebug.props,添加上。点击选中开头为Release的子项里右键,点击添加现有属性表,然后找到你下载的文件夹里的PCLRelease.props,添加上。
注意在这里,64位的会有2个开头为Debug的子项,都要添加上PCLDebug.props,并且2个开头为Release的子项,也要添加上PCLRelease.props。

关于PCLRelease.props文件和PCLDebug.props文件在网盘的链接里面有;
9.
注意:如果出现以下这种问题:

解决方案:



从上图中的箭头中,将问题中提示的.lib文件删除即可;
五、程序实际测试
将rabbit.pcd(在网盘中)放到与工程中的主.cpp同一位置的文件夹下(工程文件夹)
程序代码:
1 #include<pcl/visualization/cloud_viewer.h> 2 #include<iostream>//标准C++库中的输入输出类相关头文件。 3 #include<pcl/io/io.h> 4 #include<pcl/io/pcd_io.h>//pcd 读写类相关的头文件。 5 #include<pcl/io/ply_io.h> 6 #include<pcl/point_types.h> //PCL中支持的点类型头文件。 7 int user_data; 8 using std::cout; 9 10 11 void viewerOneOff(pcl::visualization::PCLVisualizer& viewer) { 12 viewer.setBackgroundColor(1.0, 0.5, 1.0); //设置背景颜色 13 } 14 15 int main() { 16 pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); 17 18 char strfilepath[256] = "rabbit.pcd"; 19 if (-1 == pcl::io::loadPCDFile(strfilepath, *cloud)) { 20 cout << "error input!" << endl; 21 return -1; 22 } 23 24 cout << cloud->points.size() << endl; 25 pcl::visualization::CloudViewer viewer("Cloud Viewer"); //创建viewer对象 26 27 viewer.showCloud(cloud); 28 viewer.runOnVisualizationThreadOnce(viewerOneOff); 29 system("pause"); 30 return 0; 31 }
效果图:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号