

MBD软件开发
参考文章:
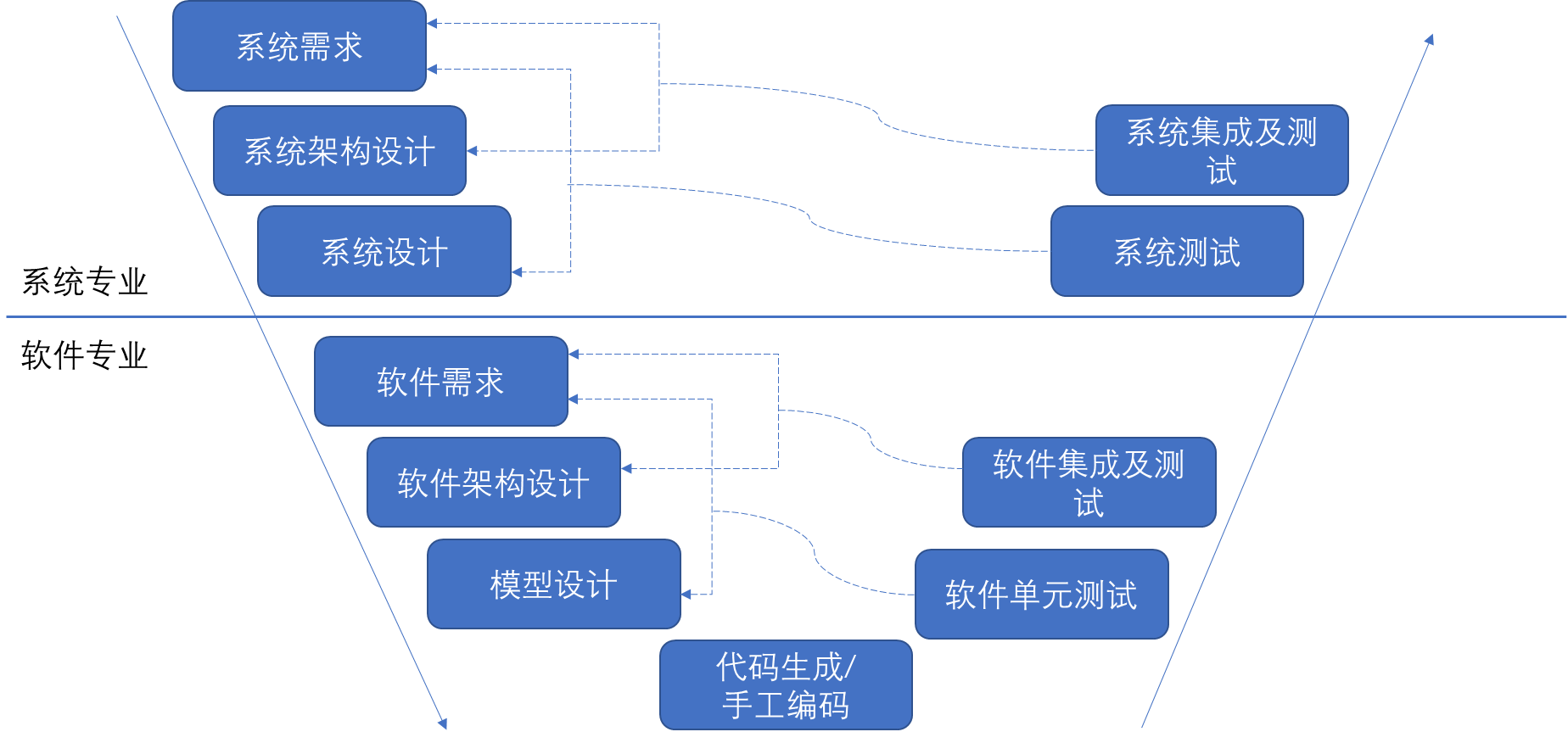
MBD在汽车工业中的工作流程:
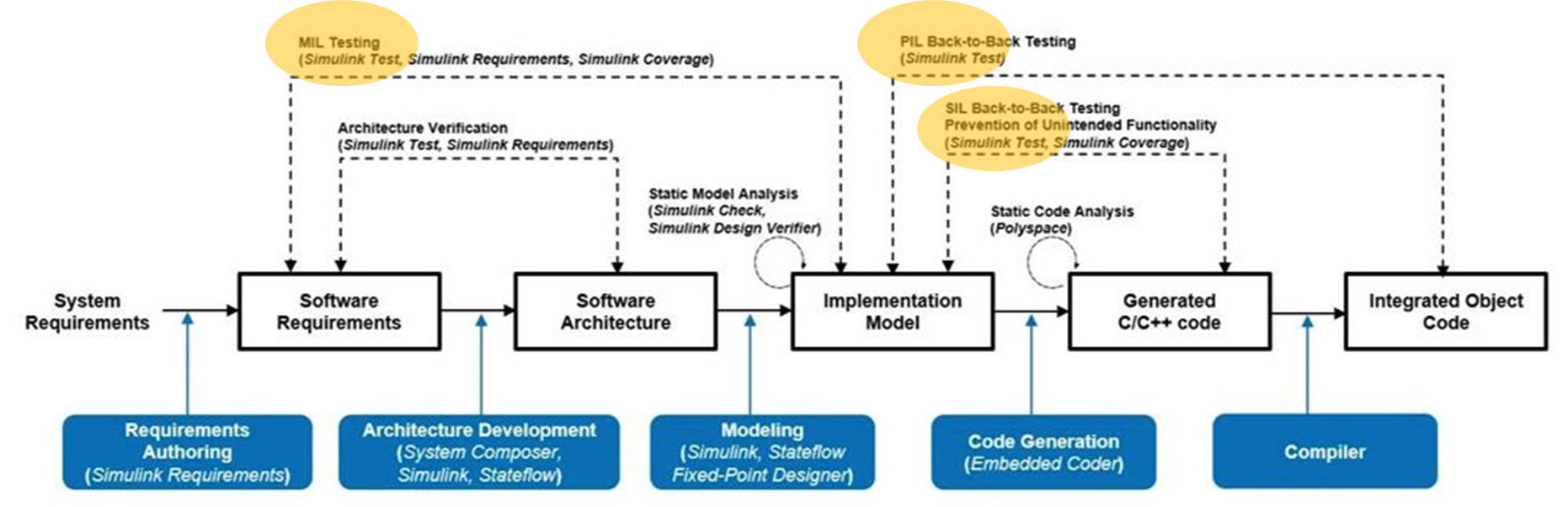
该图截取自Mathworks官网技术文章”An ISO 26262 Workflow for Automated Driving Applications Using MATLAB: Guidelines and Best Practices”:
重要文章”如何将Simulink应用于ISO 26262项目”:
MBD对ISO-26262认证支持的新进展: 预期功能安全(SOTIF)流程集成:
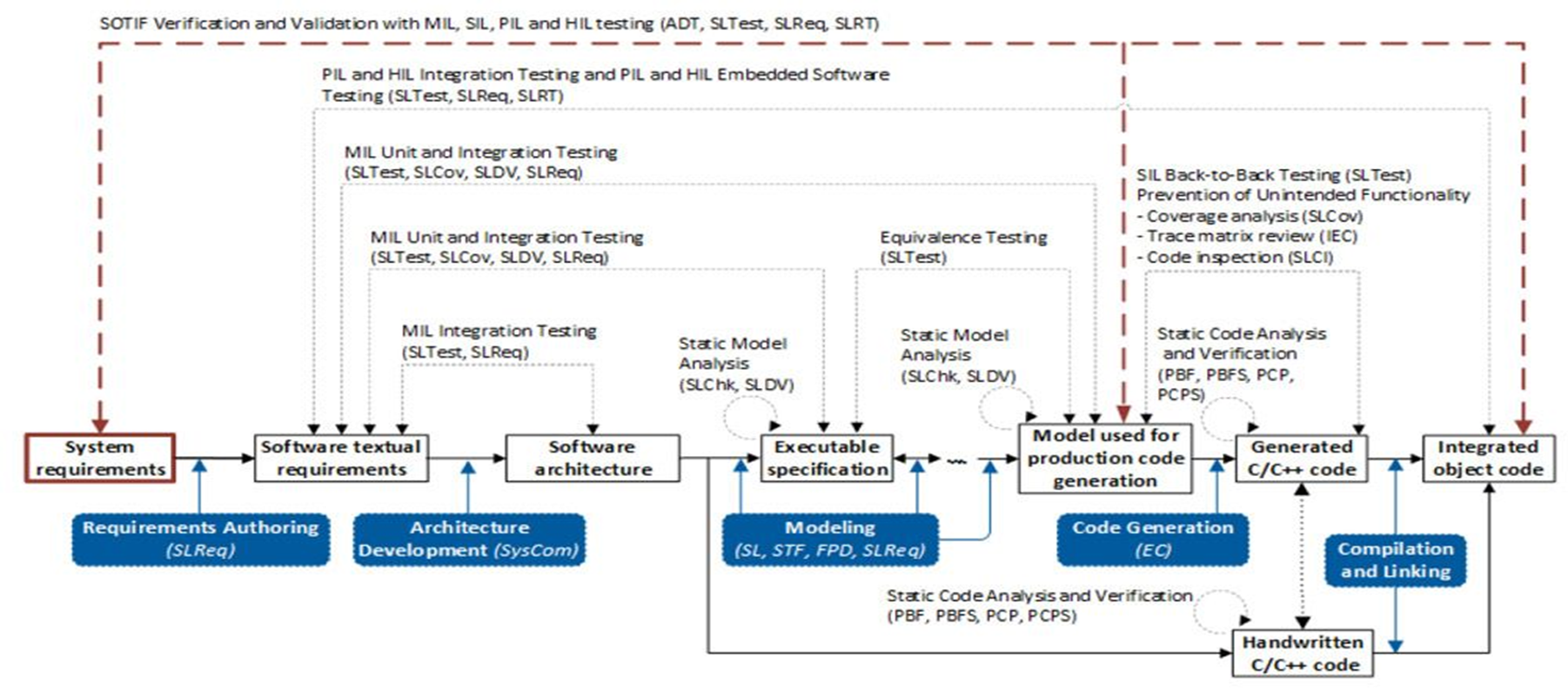
该图截取自Mathworks官网技术文章”MBD对ISO-26262认证支持的新进展”:
四个种在环测试方案:
参考文章:
MIL(Model In Loop):模型在环

目的:
1、系统工程师:快速验证算法原型的功能需求。
2、软件工程师:模型级的集成测试。
MIL最大的作用还是梳理项目的开发框架,是系统层面上的设计工作,还可以对不熟悉的领域或者相关知识进行学习
SIL(Software In Loop):软件在环
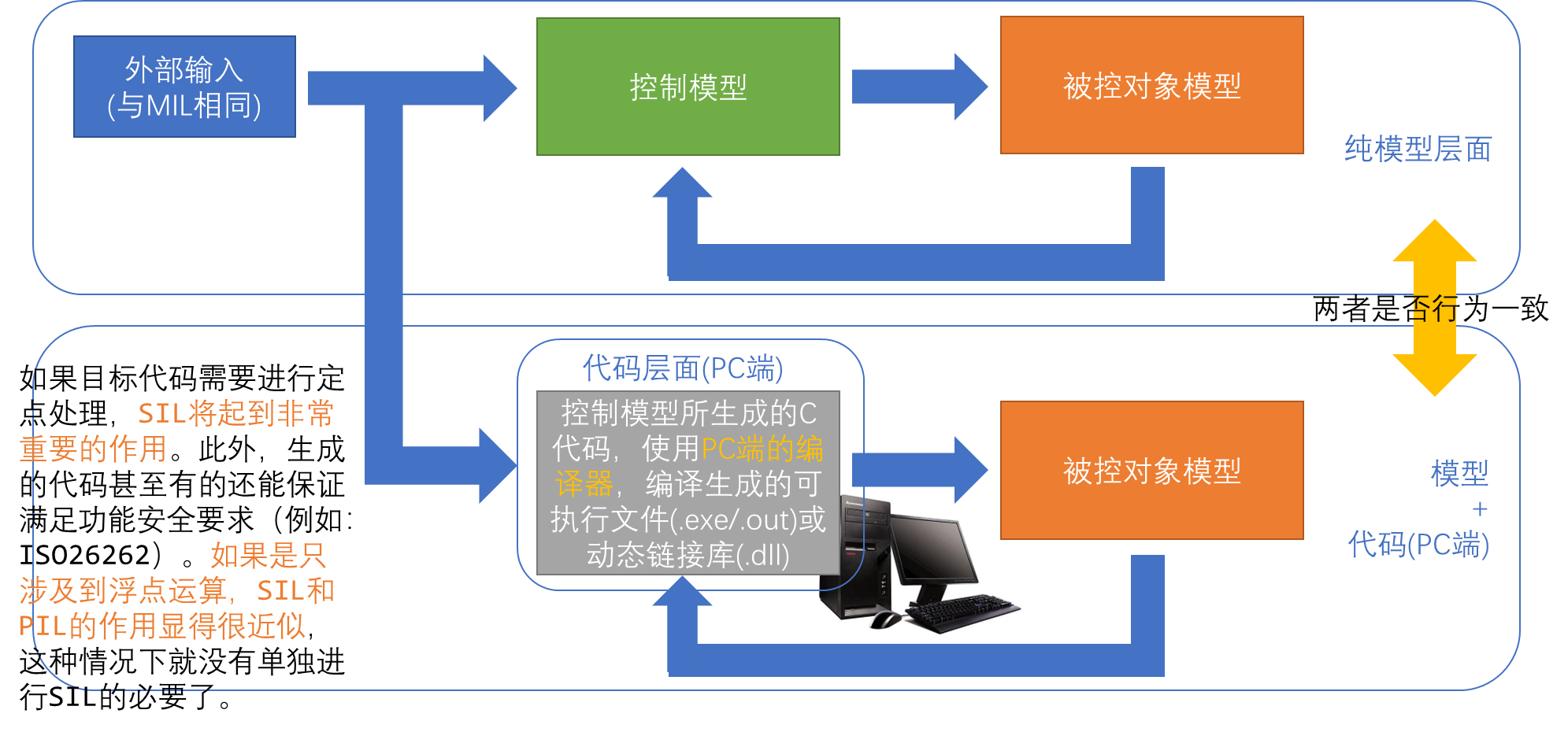
目的:
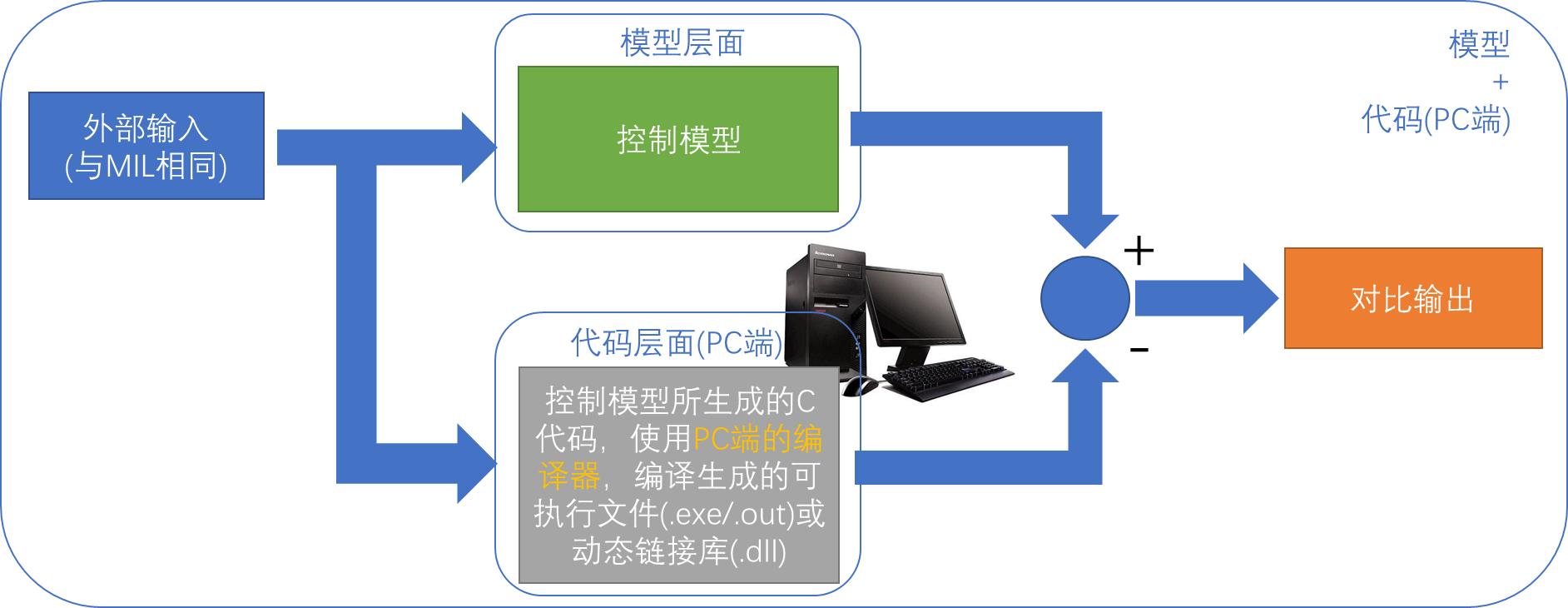
验证模型与模型所生成的C代码在PC端上,是否一致,即:SIL是一种等效性验证,验证”模型”和”代码(PC端)”的行为是否等效。
因为SIL的目的是等效性验证,因此,可以不用搭建前述的那种完整的闭环模型,而使用如下方式替代:
PIL(Processor In Loop):处理器在环
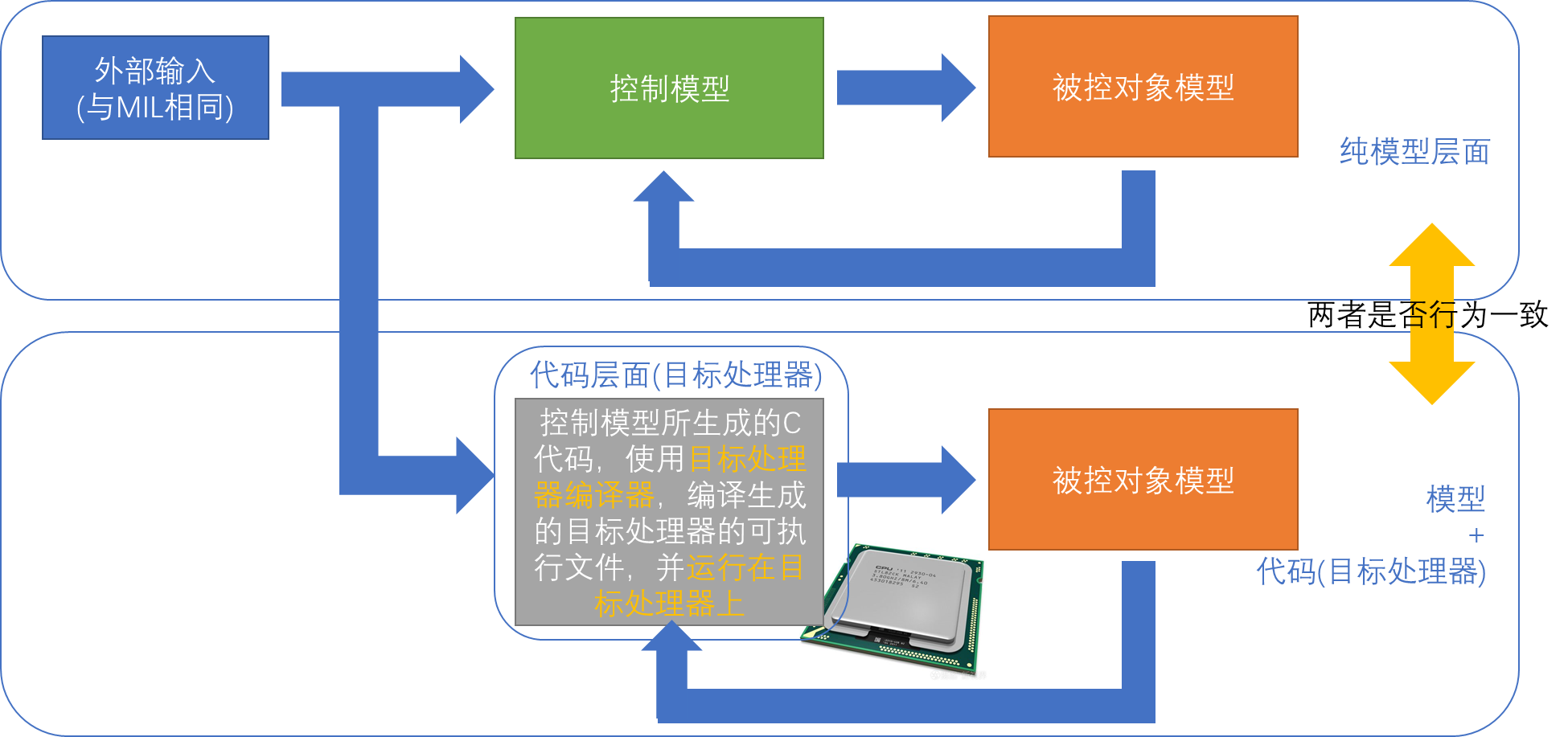
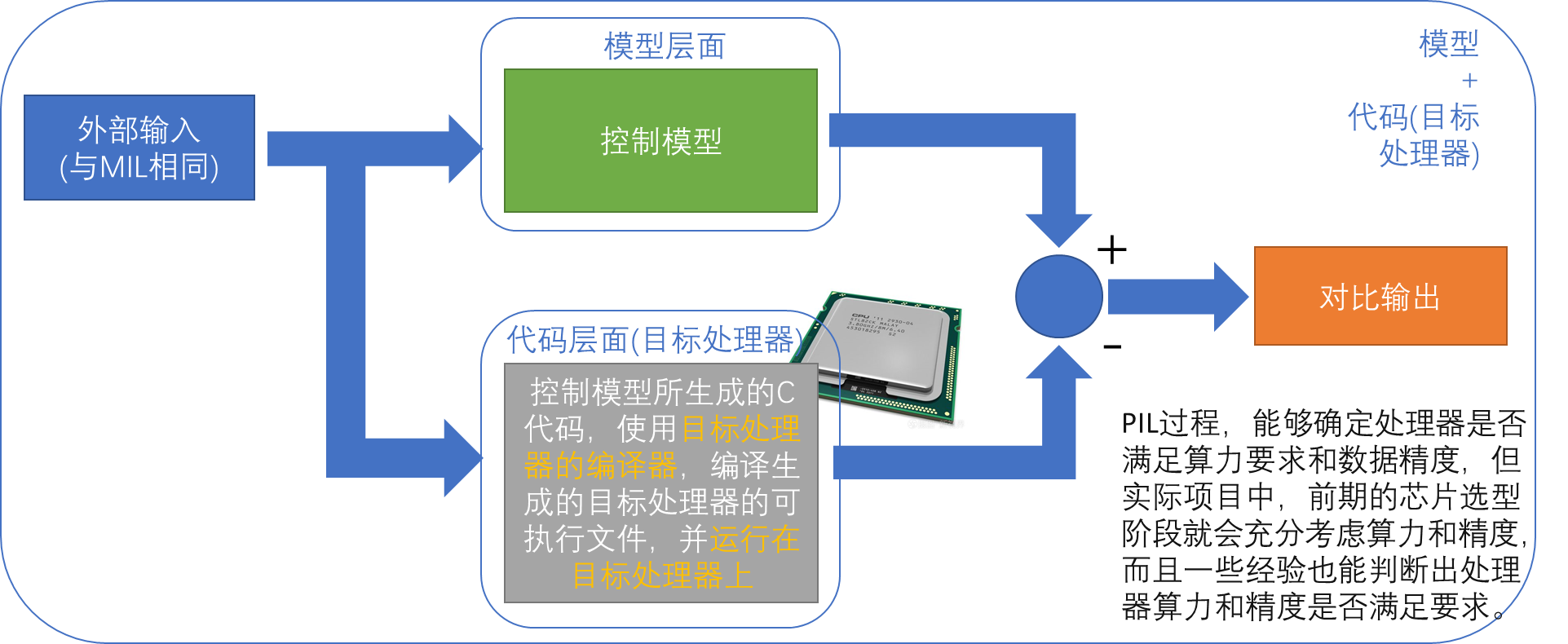
1、验证模型与模型所生成的C代码在目标处理器上,是否一致,即:PIL是一种等效性验证,验证”模型”和”代码(目标处理器端)”的行为是否等效。
2、获得算法在实际处理器上的运行时间信息(如:最长运行时间)。
因为PIL的目的是等效性验证,因此,可以不用搭建前述的那种完整的闭环模型,而使用如下方式替代:
HIL(Processor In Loop):硬件在环
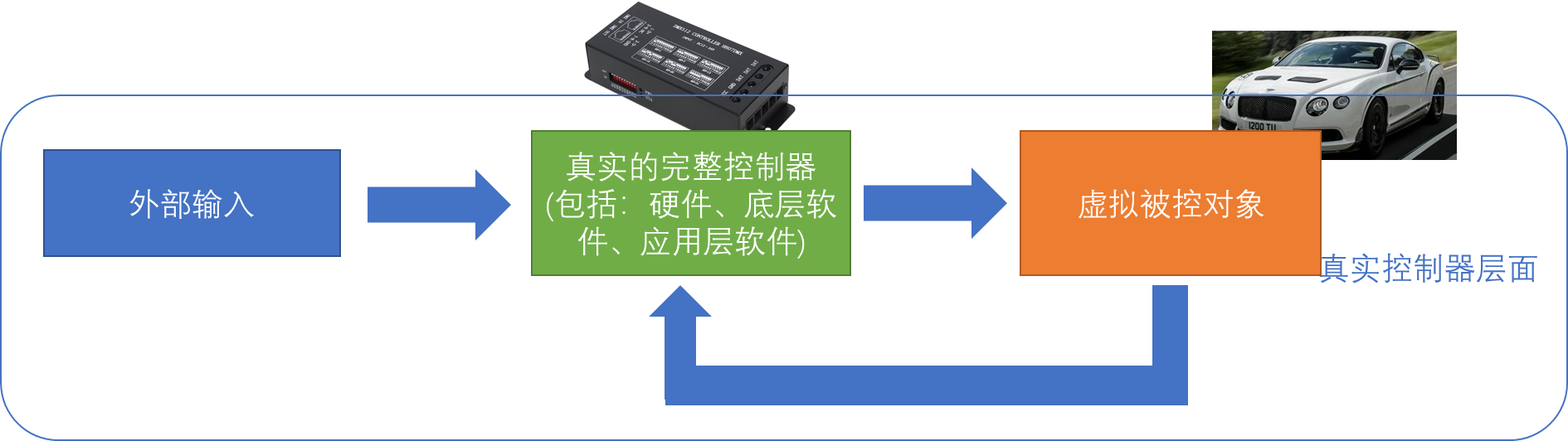
很多人会把HIL和PIL混淆,也有人认为PIL是一种简化的HIL,理由是PIL测试的时候也需要引入硬件。这种理解是错误的。
PIL和HIL验证的目的不同:
PIL用于验证软件和模型是否一致,是一种等效性验证。
HIL用于验证完整的控制器系统,控制器系统包括了硬件、底层软件和应用层软件。
*:严格来说HIL是可以从MBD独立出来的,使用HIL不意味着就一定是MBD。
