图像配准系列之“Sift特征点+薄板样条变换+FFD变换”配准方法
上篇文章中我们讲了“Sift+TPS”的配准方法:
我们知道,TPS薄板样条变换(简称TPS变换)与FFD变换均具有一定的局部形变特性。不过对于TPS变换,只要其输入的匹配点对中有一组发生变化,其整体的形变可能会发生很大改变,因此有时候TPS变换并不能很好地矫正局部形变。而对于FFD变换,每个点的形变坐标偏移只与其周围4*4个控制点的控制参数有关,与其它控制点无关,因此FFD变换的局部形变特性比TPS变换更好,然而“FFD+梯度下降”配准方法的输入参数通常很多,也即要优化的参数很多,优化参数时较容易陷入局部极值,且优化参数的过程很耗时:
基于此原因,有研究员提出了层次FFD的方法,我们前面已经讲过:
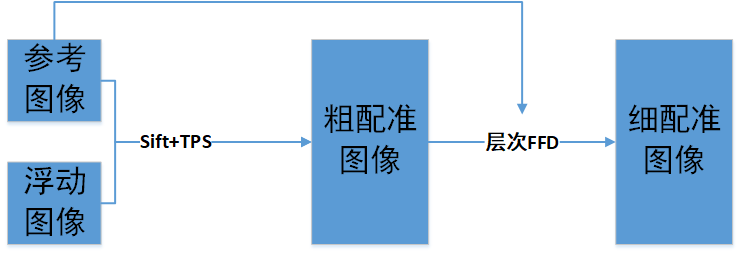
相比来说“Sift+TPS”的配准方法更稳定更快,为了使配准效果更好、更快、更稳定,因此后来又有人提出进一步把“层次FFD”与“Sift+TPS”结合起来,使配准效果更好、更快、更稳定。如下图所示:
下面上代码:
(1) 层次FFD代码
void level_ffd_match(Mat img1, Mat img2, Mat &outffd)
{
float min = -0.01;
float max = 0.01;
//第一层
int row_block_num = 8;
int col_block_num = 8;
Mat grid_points;
init_bpline_para(img1, row_block_num, col_block_num, grid_points, min, max);
Mat out;
bpline_match(img1, img2, out, row_block_num, col_block_num, grid_points);
//第二层
row_block_num = 16;
col_block_num = 16;
init_bpline_para(img1, row_block_num, col_block_num, grid_points, min, max);
Mat out1;
bpline_match(img1, out, out1, row_block_num, col_block_num, grid_points);
//第三层
row_block_num = 30;
col_block_num = 30;
init_bpline_para(img1, row_block_num, col_block_num, grid_points, min, max);
Mat out2;
bpline_match(img1, out1, out2, row_block_num, col_block_num, grid_points);
out2.copyTo(outffd);
}
(2) “Sift+TPS+层次FFD”代码
void Sift_Tps_test(void)
{
Mat img1 = imread("lena.jpg", CV_LOAD_IMAGE_GRAYSCALE);
Mat img2 = imread("lena_ffd.jpg", CV_LOAD_IMAGE_GRAYSCALE);
imshow("image before", img1);
imshow("image2 before", img2);
// SIFT - 检测关键点并在原图中绘制
vector<KeyPoint> kp1, kp2;
kp1 = detect_sift_block(img1, 50, 5, 5);
kp2 = detect_sift_block(img2, 50, 5, 5);
Mat outimg1, outimg2;
drawKeypoints(img1, kp1, outimg1);
drawKeypoints(img2, kp2, outimg2);
imshow("image1 keypoints", outimg1);
imshow("image2 keypoints", outimg2);
// SIFT - 特征向量提取
Ptr<SiftDescriptorExtractor> extractor = SiftDescriptorExtractor::create();
Mat descriptor1, descriptor2;
extractor->compute(img1, kp1, descriptor1);
extractor->compute(img2, kp2, descriptor2);
// 两张图像的特征匹配
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce");
vector<DMatch> matches;
Mat img_matches;
matcher->match(descriptor1, descriptor2, matches);
//计算匹配结果中距离最大和距离最小值
double min_dist = matches[0].distance, max_dist = matches[0].distance;
for (int m = 0; m < matches.size(); m++)
{
if (matches[m].distance < min_dist)
{
min_dist = matches[m].distance;
}
if (matches[m].distance > max_dist)
{
max_dist = matches[m].distance;
}
}
cout << "min dist=" << min_dist << endl;
cout << "max dist=" << max_dist << endl;
vector<DMatch> goodMatches;
for (int i = 0; i < matches.size(); i++) //筛选出较好的匹配点
{
if (matches[i].distance < 0.35*max_dist)
{
goodMatches.push_back(matches[i]);
}
}
cout << "The number of good matches:" << goodMatches.size() << endl;
//坐标转换为float类型
vector <KeyPoint> good_kp1, good_kp2;
for (int i = 0; i < goodMatches.size(); i++)
{
good_kp1.push_back(kp1[goodMatches[i].queryIdx]);
good_kp2.push_back(kp2[goodMatches[i].trainIdx]);
}
//坐标变换
vector <Point2f> p01, p02;
for (int i = 0; i < goodMatches.size(); i++)
{
p01.push_back(good_kp1[i].pt);
p02.push_back(good_kp2[i].pt);
}
vector<uchar> RANSACStatus;//用以标记每一个匹配点的状态,等于0则为外点,等于1则为内点。
findFundamentalMat(p01, p02, RANSACStatus, CV_FM_RANSAC, 4.5);//p1 p2必须为float型
vector<Point2f> f1_features_ok;
vector<Point2f> f2_features_ok;
for (int i = 0; i < p01.size(); i++) //剔除跟踪失败点
{
if (RANSACStatus[i])
{
f1_features_ok.push_back(p01[i]); //基准图特征点
f2_features_ok.push_back(p02[i]); //流动图特征点
}
}
Mat Tx, Ty;
Tps_TxTy(f1_features_ok, f2_features_ok, img2.rows, img2.cols, Tx, Ty);
Mat tps_out;
remap(img2, tps_out, Tx, Ty, INTER_CUBIC); //Sift+TPS粗配准结果
Mat ffd_out;
level_ffd_match(img1, tps_out, ffd_out); //层次FFD细配准结果
imshow("img2-img1", abs(img2-img1));
imshow("tps_out-img1", abs(tps_out - img1));
imshow("ffd_out-img1", abs(ffd_out - img1));
imshow("tps_out", tps_out);
imshow("ffd_out", ffd_out);
cv::waitKey(0);
}
运行上述代码,对扭曲的Lena图像进行配准,结果如下。由以下结果可知,细配准图像比粗配准图像的形变矫正效果好多了。因此结合两种方法的配准方法的配准效果更好。

原图
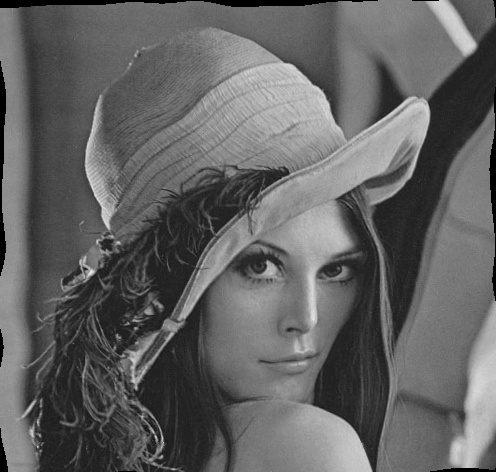
浮动图像

粗配准图像

细配准图像
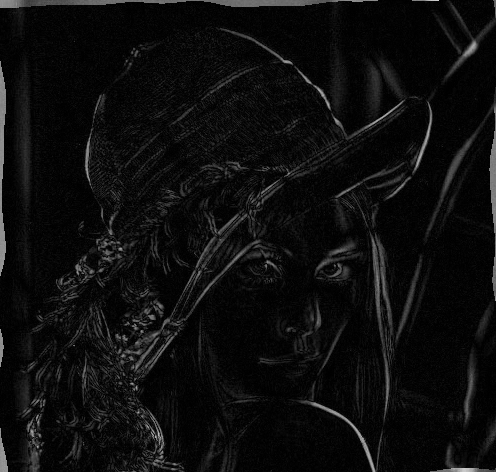
浮动图像与参考图像的差值图

粗配准图像与参考图像的差值图
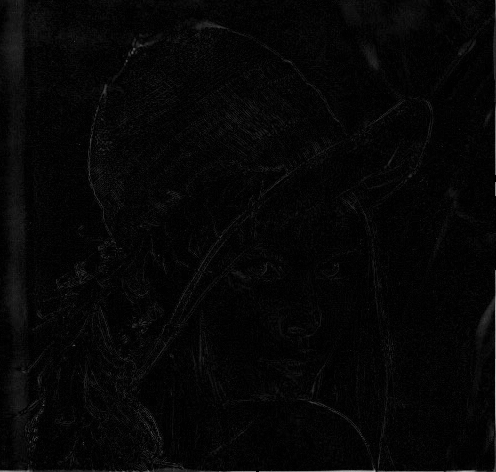
细配准图像与参考图像的差值图
欢迎扫码关注以下微信公众号,接下来会不定时更新更加精彩的内容噢~

