

基于“FFD形变+梯度下降优化”图像配准的一种加速方法
前文我们讲过FFD形变与梯度下降优化算法的原理:
1. “FFD形变+梯度下降法”配准的主要耗时点
我们知道,基于“FFD形变+梯度下降优化”图像配准的核心思路是:
假设图像A为基准图像,图像B为浮动图像,使用FFD形变作为形变模型,对图像B进行形变,并计算图像A与形变之后的图像B的相似度,通过求解FFD形变的最优控制参数,使得两者相似度达到最大,然后使用最优控制参数对图像B进行形变,实现对其配准。
如下图所示,我们把图像A与FFD形变之后图像B的相似度作为目标函数,然后使用梯度下降法求解这个目标函数的最优解。

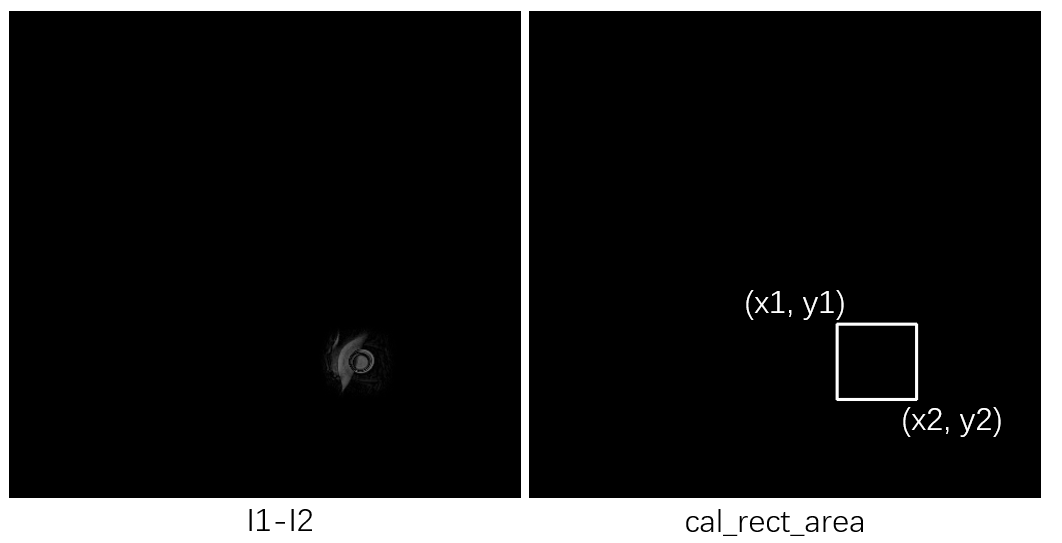
既然使用梯度下降法来求最优参数,那么就得求每个参数的梯度(偏导数)。假设目标函数f的输入参数为x1、x2、…、xn,那么其偏导数的定义为:

上式中Δx越接近0,所求值越接近偏导数的真实值,因此我们在实际计算时通常将Δx设置为一个较小值来计算梯度的近似值,如下式所示,EPS通常取0.1~0.5:

对于FFD形变模型,假设其有M*N个网格控制点,每个控制点有2个控制参数(x方向、y方向),因此总共有2*M*N个控制参数(输入参数):x1、x2、…、x2*M*N。我们使用的相似度衡量指标为归一化互相关(NCC),那么目标函数f可以表示为:

由上式可知,在梯度下降法的每轮迭代中我们需要计算2*M*N个输入参数的梯度,其中f(x1, x2, …, x2*M*N)只需要计算一次,f(x1, x2, …, xi+EPS, ..., x2*M*N)则需要计算2*M*N次,所以在每轮迭代中:
总共需要对浮动图像B执行2*M*N+1次FFD形变。
总共需要对图像A与经过FFD形变的图像B计算2*M*N次NCC。
以上就是“FFD形变+梯度下降法”配准的两个主要耗时点。在本文中我们将着重想办法来解决这两个主要耗时点,从而加速配准过程。
2. FFD形变的局部独立性特点
我们在前文讲过,FFD形变模型使用每个像素点周围4*4个控制点的控制参数来计算它的位置偏移,因此每个像素点形变之后的位置偏移只与它周围4*4个控制点有关,与其它控制点无关,这就是FFD形变的局部独立性特点。如下图所示,像素点A的形变由其周围4*4个控制点决定(从该点左上角开始数起)。

根据以上FFD形变的局部独立性特点,每一个控制点能影响的区域是有限的。如下图所示,对于控制点B,其只能影响橙色区域内像素点的形变偏移值,或者换一种说法,仅橙色区域内的像素点计算形变坐标偏移时才使用到控制点B的控制参数,橙色区域外的像素点均与控制点B无关。

因此我们由控制点B的网格坐标就可以把它影响的区域给确定下来,也即得到图像上被控制点B影响的区域的左上角、右下角坐标,实现代码如下:
#define BPLINE_BOARD_SIZE 3
//pos为控制点序号,比如有M*N个控制点,则pos的值为0~M*N之间的一个值
//row为图像高
//col为图像宽
//row_block_num+3为网格控制点的行数、col_block_num+3为网格控制点的列数
//x1、y1、x2、y2分别为影响区域的左上角x坐标、左上角y坐标、右下角x坐标、右下角y坐标
void cal_rect_area(int pos, int row, int col, int row_block_num, int col_block_num, int &x1, int &y1, int &x2, int &y2)
{
int control_point_xx;
int control_point_yy;
int grid_cols = col_block_num + BPLINE_BOARD_SIZE;
float delta_x = col*1.0 / col_block_num;
float delta_y = row*1.0 / row_block_num;
control_point_xx = pos % grid_cols; //得到控制点的x网格坐标
control_point_yy = pos / grid_cols; //得到控制点的y网格坐标
//根据上图,由控制点的网格坐标即可得到影响区域的左上角、右下角坐标
//需要注意这里得到的是网格坐标,x、y需要分别乘以delta_x、delta_y转换为图像坐标
x1 = floor((control_point_xx - 3)*delta_x);
y1 = floor((control_point_yy - 3)*delta_y);
x2 = floor((control_point_xx + 1)*delta_x);
y2 = floor((control_point_yy + 1)*delta_y);
//边界处理
x1 = (x1 <= 0) ? 0 : (x1 + 1);
y1 = (y1 <= 0) ? 0 : (y1 + 1);
x2 = (x2 > col - 1) ? (col - 1) : x2;
y2 = (y2 > row - 1) ? (row - 1) : y2;
}
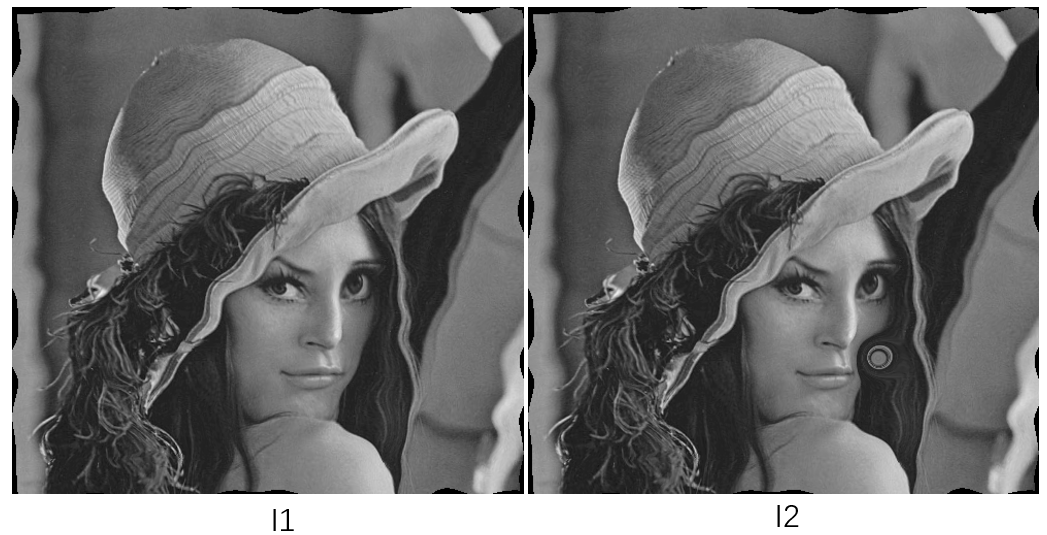
下面我们做一个测试来验证我们得到的控制点影响区域是否正确:
首先初始化(25+3)*(25+3)个网格点的2*(25+3)*(25+3)个控制参数,使用这些参数对Lena图像进行FFD形变,得到形变图像I1;
然后改变2*(25+3)*(25+3)个控制参数中的第pos个控制参数的值,并对Lena图像进行FFD形变,得到形变图像I2;
计算I1和I2的差值图diff;
调用以上cal_rect_area函数获取第pos个控制参数的影响区域,并与差值图的差异区域进行比较,看是否一致。
代码如下:
void ffd_area_test(void)
{
Mat img = imread("lena.jpg", CV_LOAD_IMAGE_GRAYSCALE);
int row_block_num = 25;
int col_block_num = 25;
Mat grid_points;
//初始化控制参数
init_bpline_para(img, row_block_num, col_block_num, grid_points, -10, 10);
Mat I1;
//计算I1
Bspline_Ffd(img, I1, row_block_num, col_block_num, grid_points);
int pos = 550; //修改第550个控制参数
grid_points.ptr<float>(0)[pos] += 150.5;
Mat I2;
//计算I2
Bspline_Ffd(img, I2, row_block_num, col_block_num, grid_points);
Mat diff = abs(I1- I2); //计算I1、I2的差值图
int x1, y1, x2, y2;
//获取第550个控制参数的影响区域
cal_rect_area(pos, img.rows, img.cols, row_block_num, col_block_num, x1, y1, x2, y2);
Mat area = Mat::zeros(img.size(), CV_8UC1);
rectangle(area, Rect(x1, y1, x2 - x1, y2 - y1), Scalar(255, 255, 255), 2);
imshow("I1", I1);
imshow("I2", I2);
imshow("diff", diff);
imshow("area", area);
waitKey();
}
运行结果如下,由此可知,我们调用函数cal_rect_area获取控制点的影响区域是正确的。

Lena原图
3. 梯度计算过程的加速
由以上章节可知,当改变某个控制点的1个控制参数的值时,仅影响该控制点周围局部区域的形变,局部区域之外的形变不受影响。而我们计算某个控制参数的梯度时,正是通过给该控制参数加上一个EPS来计算差分值,从而得到近似梯度值。因此我们计算梯度时可以利用FFD局部独立性的特点来加速计算。
假设改变控制参数之前图像B的FFD形变图像为I1,改变第i个控制参数之后图像B的FFD形变图像为I2。每轮迭代中I1只需要计算一次且保持不变,改变不同的控制参数得到的I2是各不相同的:
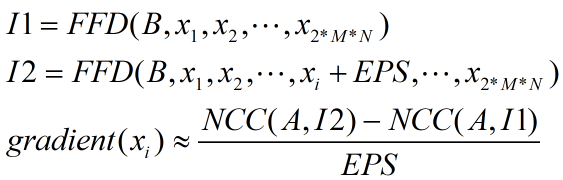
由上述的FFD局部独立性特点可知,I2与I1的区别并不大,区别仅仅在于改变控制参数的控制点周围的一小部分区域,所以我们计算I2时,只需要计算该影响区域的形变图像ΔI,然后再结合I1即可得到I2,而不需要计算整个图像B的形变图像。
而且,计算NCC(A, I2)时也可以利用以上所说的局部独立性来加速计算。由于I2与I1的区别仅仅在形变图像ΔI,且每轮迭代中NCC(A, I1)只需计算一次且保持不变,因此可以使用NCC(A, I1)与ΔI来快速计算得到NCC(A, I2)。
假设图像A、B的尺寸都为m行n列,那么A、B的NCC的计算公式如下:
我们记:

所以有A、I1和A、I2的NCC计算公式:

由以上可知I2与I1的区别区域为一个很小的区域ΔI,ΔI的左上角、右下角坐标分别为(x1,y1)和(x2,y2),那么有以下关系:

因此有下式,也即是NCC(A, I2)的快速计算式:

上式中:

实现代码:
获取I1与I2的区别区域代码:
void cal_rect_area(int pos, int row, int col, int row_block_num, int col_block_num, int &x1, int &y1, int &x2, int &y2)
{
int control_point_xx;
int control_point_yy;
int grid_cols = col_block_num + BPLINE_BOARD_SIZE;
float delta_x = col*1.0 / col_block_num;
float delta_y = row*1.0 / row_block_num;
control_point_xx = pos % grid_cols;
control_point_yy = pos / grid_cols;
x1 = floor((control_point_xx - 3)*delta_x);
y1 = floor((control_point_yy - 3)*delta_y);
x2 = floor((control_point_xx + 1)*delta_x);
y2 = floor((control_point_yy + 1)*delta_y);
x1 = (x1 <= 0) ? 0 : (x1 + 1);
y1 = (y1 <= 0) ? 0 : (y1 + 1);
x2 = (x2 > col - 1) ? (col - 1) : x2;
y2 = (y2 > row - 1) ? (row - 1) : y2;
}
计算A、I1两张图像NCC的代码如下,计算之后把sum(A,I1)、sum(A)和sum(I1)保存下来,用于快速计算A、I2的NCC:
double cal_cc1(Mat S1, Mat Si, double &sum1, double &sum2, double &sum3)
{
for (int i = 0; i < S1.rows; i++)
{
uchar *S1_data = S1.ptr<uchar>(i);
uchar *Si_data = Si.ptr<uchar>(i);
for (int j = 0; j < S1.cols; j++)
{
sum1 += S1_data[j] * S1_data[j]; //sum(A)
sum2 += S1_data[j] * Si_data[j]; //sum(A,I1)
sum3 += Si_data[j] * Si_data[j]; //sum(I1)
}
}
//计算NCC的倒数作为目标函数值
double cc1 = sqrt(sum1*sum3) / (sum2 + 0.0000001);
return cc1;
}
快速计算A、I2的NCC代码:
//sum1、sum2、sum3由cal_cc1函数计算得到
double cal_cc2(Mat S1, Mat Si1, Mat Si2, int x1, int y1, int x2, int y2, double sum1, double sum2, double sum3)
{
double sum2_i = sum2;
double sum3_i = sum3;
for (int i = y1; i <= y2; i++)
{
uchar *S1_data = S1.ptr<uchar>(i);
uchar *Si1_data = Si1.ptr<uchar>(i);
uchar *Si2_data = Si2.ptr<uchar>(i);
for (int j = x1; j <= x2; j++)
{
sum2_i = sum2_i - S1_data[j] * Si1_data[j] + S1_data[j] * Si2_data[j];
sum3_i = sum3_i - Si1_data[j] * Si1_data[j] + Si2_data[j] * Si2_data[j];
}
}
//计算NCC的倒数作为目标函数值
double cc2 = sqrt(sum1*sum3_i) / (sum2_i + 0.0000001);
return cc2;
}
整体图像FFD形变代码:
void Bspline_Ffd(Mat srcimg, Mat &dstimg, int row_block_num, int col_block_num, Mat grid_points)
{
dstimg.create(srcimg.size(), srcimg.type());
float delta_x = srcimg.cols*1.0 / col_block_num;
float delta_y = srcimg.rows*1.0 / row_block_num;
int grid_rows = row_block_num + BPLINE_BOARD_SIZE;
int grid_cols = col_block_num + BPLINE_BOARD_SIZE;
int grid_size = grid_rows*grid_cols;
float pX[4], pY[4];
for (int y = 0; y < srcimg.rows; y++) //B_spline 变形
{
for (int x = 0; x < srcimg.cols; x++)
{
float y_block = y / delta_y;
float x_block = x / delta_x;
int i = floor(y_block);
int j = floor(x_block);
float u = x_block - j;
float v = y_block - i;
//使用基函数计算权重系数
pX[0] = (1 - u*u*u + 3 * u*u - 3 * u) / 6.0;
pX[1] = (4 + 3 * u*u*u - 6 * u*u) / 6.0;
pX[2] = (1 - 3 * u*u*u + 3 * u*u + 3 * u) / 6.0;
pX[3] = u*u*u / 6.0;
pY[0] = (1 - v*v*v + 3 * v*v - 3 * v) / 6.0;
pY[1] = (4 + 3 * v*v*v - 6 * v*v) / 6.0;
pY[2] = (1 - 3 * v*v*v + 3 * v*v + 3 * v) / 6.0;
pY[3] = v*v*v / 6.0;
float Tx = 0;
float Ty = 0;
for (int m = 0; m < 4; m++)
{
for (int n = 0; n < 4; n++)
{
int control_point_x = j + n;
int control_point_y = i + m;
float temp = pY[m] * pX[n];
Tx += temp*grid_points.at<float>(0, control_point_y*grid_cols + control_point_x); //x
Ty += temp*grid_points.at<float>(0, control_point_y*grid_cols + control_point_x + grid_size); //y
}
}
float src_x = x + Tx;
float src_y = y + Ty;
int x1 = cvFloor(src_x);
int y1 = cvFloor(src_y);
if (x1 < 1 || x1 >= srcimg.cols - 1 || y1 < 1 || y1 >= srcimg.rows - 1)//越界
{
dstimg.at<uchar>(y, x) = 0;
}
else
{
//双线性插值
int x2 = x1 + 1;
int y2 = y1 + 1;
uchar pointa = srcimg.at<uchar>(y1, x1);
uchar pointb = srcimg.at<uchar>(y1, x2);
uchar pointc = srcimg.at<uchar>(y2, x1);
uchar pointd = srcimg.at<uchar>(y2, x2);
uchar gray = (uchar)((x2 - src_x)*(y2 - src_y)*pointa - (x1 - src_x)*(y2 - src_y)*pointb - (x2 - src_x)*(y1 - src_y)*pointc + (x1 - src_x)*(y1 - src_y)*pointd);
dstimg.at<uchar>(y, x) = gray;
}
}
}
}
计算I2的ΔI区域FFD形变图像代码,其中的(x1,y1)、(x2,y2)分别为ΔI区域的左上角、右下角坐标,由以上函数cal_rect_area得到。函数Bspline_Ffd_area与以上的函数Bspline_Ffd的主要区别在于,前者仅计算部分区域的形变,后者计算整张图像的形变:
void Bspline_Ffd_area(Mat srcimg, Mat &dstimg, int row_block_num, int col_block_num, Mat grid_points, int x1, int y1, int x2, int y2)
{
dstimg = Mat::zeros(srcimg.size(), CV_8UC1);
float delta_x = srcimg.cols*1.0 / col_block_num;
float delta_y = srcimg.rows*1.0 / row_block_num;
int grid_rows = row_block_num + BPLINE_BOARD_SIZE;
int grid_cols = col_block_num + BPLINE_BOARD_SIZE;
int grid_size = grid_rows*grid_cols;
float pX[4], pY[4];
float *p_grid = grid_points.ptr<float>(0);
for (int y = y1; y <= y2; y++) //B_spline变形,只对矩形区域变形
{
float y_block = y / delta_y;
int i = floor(y_block);
float v = y_block - i;
float v2 = v*v;
float v3 = v2*v;
pY[0] = (1 - v3 + 3 * v2 - 3 * v) / 6.0; //使用基函数计算权重系数
pY[1] = (4 + 3 * v3 - 6 * v2) / 6.0;
pY[2] = (1 - 3 * v3 + 3 * v2 + 3 * v) / 6.0;
pY[3] = v3 / 6.0;
uchar *p_dst = dstimg.ptr<uchar>(y);
for (int x = x1; x <= x2; x++)
{
float x_block = x / delta_x;
int j = floor(x_block);
float u = x_block - j;
float u2 = u*u;
float u3 = u2*u;
pX[0] = (1 - u3 + 3 * u2 - 3 * u) / 6.0; //使用基函数计算权重系数
pX[1] = (4 + 3 * u3 - 6 * u2) / 6.0;
pX[2] = (1 - 3 * u3 + 3 * u2 + 3 * u) / 6.0;
pX[3] = u3 / 6.0;
float Tx = 0;
float Ty = 0;
for (int m = 0; m < 4; m++)
{
for (int n = 0; n < 4; n++)
{
int control_point_x = j + n;
int control_point_y = i + m;
float temp = pY[m] * pX[n];
Tx += temp*p_grid[control_point_y*grid_cols + control_point_x]; //x
Ty += temp*p_grid[control_point_y*grid_cols + control_point_x + grid_size]; //y
}
}
float src_x = x + Tx;
float src_y = y + Ty;
int x1 = cvFloor(src_x);
int y1 = cvFloor(src_y);
if (x1 < 1 || x1 >= srcimg.cols - 1 || y1 < 1 || y1 >= srcimg.rows - 1)//越界
{
p_dst[x] = 0;
}
else
{
int x2 = x1 + 1; //双线性插值
int y2 = y1 + 1;
uchar pointa = srcimg.at<uchar>(y1, x1);
uchar pointb = srcimg.at<uchar>(y1, x2);
uchar pointc = srcimg.at<uchar>(y2, x1);
uchar pointd = srcimg.at<uchar>(y2, x2);
uchar gray = (uchar)((x2 - src_x)*(y2 - src_y)*pointa - (x1 - src_x)*(y2 - src_y)*pointb - (x2 - src_x)*(y1 - src_y)*pointc + (x1 - src_x)*(y1 - src_y)*pointd);
p_dst[x] = gray;
}
}
}
}
梯度计算代码实现:
void cal_gradient_area(Mat S1, Mat Si, int row_block_num, int col_block_num, Mat grid_points, Mat &gradient)
{
float EPS = 0.1;
int grid_size = grid_points.cols / 2;
int x1, y1, x2, y2;
double cc1, cc2;
gradient.create(grid_points.size(), CV_32FC1);
double sum1 = 0.0, sum2 = 0.0, sum3 = 0.0;
Mat Si_ffd1, Si_ffd2;
//计算I1
Bspline_Ffd(Si, Si_ffd1, row_block_num, col_block_num, grid_points);
//计算1.0/NCC(A,I1)
cc1 = cal_cc1(S1, Si_ffd1, sum1, sum2, sum3);
Mat grid_p = grid_points.clone();
for (int i = 0; i < grid_size; i++)
{
//获取I1、I2区别区域的左上角、右下角坐标
cal_rect_area(i, S1.rows, S1.cols, row_block_num, col_block_num, x1, y1, x2, y2);
//改变一个控制参数的值
grid_p.at<float>(0, i) += EPS;
//计算区别区域的形变图像
Bspline_Ffd_area(Si, Si_ffd2, row_block_num, col_block_num, grid_p, x1, y1, x2, y2);
//快速计算1.0/NCC(A,I2)
cc2 = cal_cc2(S1, Si_ffd1, Si_ffd2, x1, y1, x2, y2, sum1, sum2, sum3);
grid_p.at<float>(0, i) -= EPS;
//计算控制点i的x控制参数的梯度
gradient.at<float>(0, i) = (cc2 - cc1) / EPS;
//计算控制点i的y控制参数的梯度,原理与以上计算x控制参数梯度一样
grid_p.at<float>(0, i + grid_size) += EPS;
Bspline_Ffd_area(Si, Si_ffd2, row_block_num, col_block_num, grid_p, x1, y1, x2, y2);
cc2 = cal_cc2(S1, Si_ffd1, Si_ffd2, x1, y1, x2, y2, sum1, sum2, sum3);
grid_p.at<float>(0, i + grid_size) -= EPS;
gradient.at<float>(0, i + grid_size) = (cc2 - cc1) / EPS;
}
}
加速梯度计算之后的梯度下降配准代码:
int bpline_match_area(Mat S1, Mat Si, Mat &M, int row_block_num, int col_block_num, Mat &grid_points, int max_iter)
{
Mat gradient;
Mat pre_grid_points;
double e = 0.000005;//定义迭代精度
float ret1 = 0.0;
float ret2 = 0.0;
int cnt = 0;
float alpha = 8000000;
cal_gradient_area(S1, Si, row_block_num, col_block_num, grid_points, gradient); //求梯度
int out_cnt = 0;
Mat pre_gradient = Mat::zeros(gradient.size(), CV_32FC1);
while (cnt < max_iter)
{
pre_grid_points = grid_points.clone();
update_grid_points(grid_points, gradient, alpha); //更新输入参数
ret1 = F_fun_bpline(S1, Si, row_block_num, col_block_num, pre_grid_points);
ret2 = F_fun_bpline(S1, Si, row_block_num, col_block_num, grid_points);
if (ret2 > ret1) //如果当前轮迭代的目标函数值大于上一轮的函数值,则减小步长并重新计算梯度、重新更新参数
{
alpha *= 0.8;
grid_points = pre_grid_points.clone();
continue;
}
cout << "f=" << ret2 << ", alpha=" << alpha << endl;
if (abs(ret2 - ret1) < e)
{
out_cnt++;
if (out_cnt >= 4) //如果连续4次目标函数值不改变,则认为求到了最优解,停止迭代
{
break;
}
}
else
{
out_cnt = 0;
}
gradient.copyTo(pre_gradient);
cal_gradient_area(S1, Si, row_block_num, col_block_num, grid_points, gradient); //求梯度
if (norm(gradient, NORM_L2) <= norm(pre_gradient, NORM_L2)) //如果梯度相比上一次迭代有所下降,则增大步长
alpha *= 2;
cnt++;
}
Bspline_Ffd(Si, M, row_block_num, col_block_num, grid_points);
return -1;
}
加速梯度计算之后,使用23*23的FFD网格对472*496大小的Lena图像进行配准,每轮迭代耗时300~400 ms,相对于加速前每轮迭代耗时11 s左右,加速效果还是相当明显的。
好了本文我们就讲到这里,欢迎关注本公众号,接下来的更新更精彩~

