
机器人关节空间轨迹规划--S型速度规划
-
关节空间 VS 操作空间
关节空间与操作空间轨迹规划流程图如下(上标ii和ff分别代表起始位置initial和目标位置final):
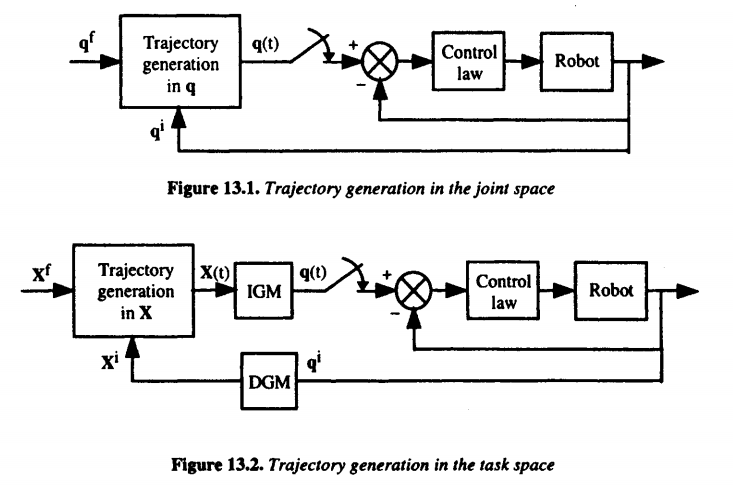
在关节空间内进行轨迹规划有如下优点:
- 在线运算量更小,即无需进行机器人的逆解或正解解算
- 不受机器人奇异构型影响
- 可以根据机器人或驱动器手册直接确定最大速度或力矩
其缺点是对应操作空间的轨迹无法预测,增加了机械臂与环境碰撞的可能。例如,考虑下面的二连杆机构,关节运动的限制为:0∘≤θ1≤180∘0∘≤θ1≤180∘,0∘≤θ2≤150∘0∘≤θ2≤150∘
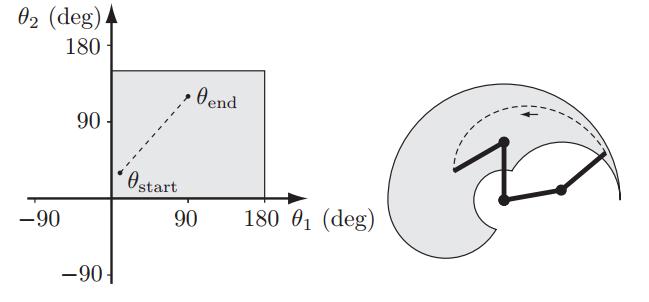
下图中,左侧为关节空间内规划的线性运动轨迹,而其对应在操作空间的轨迹却是弧线。机构末端的可达空间在图中由灰色背景表示,其大小和形状受关节运动范围的影响。
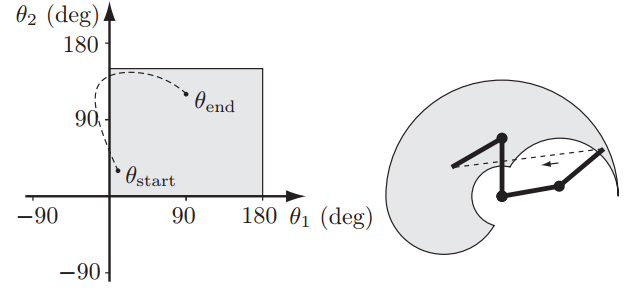
下图在操作空间中规划了一条直线轨迹,其对应的关节空间轨迹为一弧线,且在运动过程中超出了关节值限制。操作空间内进行轨迹规划优点是直观,缺点是计算量大(需要计算逆解),会遇到奇异性问题以及关节运动超限等。
到底是选择在关节空间还是操作空间内进行轨迹规划,取决于任务需要。需要考虑避障或必须沿特定轨迹运动时选择操作空间轨迹规划,只需考虑速度、力矩、关节范围等运动约束时选择关节空间轨迹规划(The joint space scheme is appropriate to achieve fast motions in a free space)。
-
梯形速度曲线
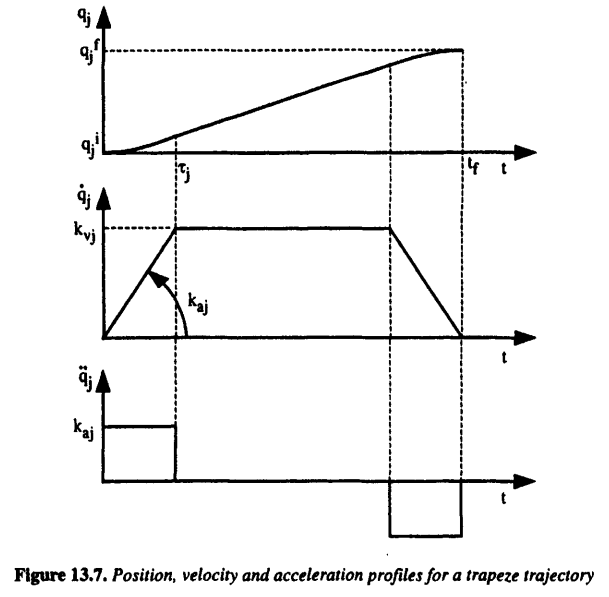
运动控制系统中常用的梯形速度曲线如下图所示,会出现加速度不连续的情形(从kajkaj到0的跳变),这样可能会导致机械系统出现冲击或不可预料的振动,不过由于机械系统存在一定的弹性并不是绝对刚体,这种加速度不连续造成的冲击会被机械机构滤除或减轻。而对于高速重载的机器人来说,这种加速度不连续造成的影响就不能忽略了。可以参考知乎上这个问题:多轴插补为什么普遍使用梯形速度曲线?
-
S型速度曲线
为了使加速度连续,可对梯形速度规划中的加速度曲线进行修改,使加速度曲线变为连续的二次曲线(a)或者梯形曲线(b),如下图所示。其中,τ′τ′为加速段时间,λjkvjλjkvj为第jj个关节的最大运动速度

下面考虑a方法(Linear Trajectory with Polynomial Blends),关节jj的运动边界条件如下,即关节jj初始时刻位置为qijqji,初始速度加速度为0,τ′τ′时刻加速到最大速度λikvjsign(Di)λikvjsign(Di),kvjkvj为理论上关节jj允许的最大速度,λjλj为一比例系数(0≤λj≤10≤λj≤1),DjDj为从起始位置到目标位置的位移,它是一个有正负的数值。

根据边界条件加速度二次曲线表达式为:k(t−τ′)tk(t−τ′)t,对其进行积分,可得qj˙(t)=16k(2t−3τ′)t2+Cqj˙(t)=16k(2t−3τ′)t2+C,根据速度边界条件可知C=0C=0,k=−6τ′3λjkvjk=−6τ′3λjkvj。于是推算出加速度、速度、位置的表达式分别为:
加速度在t=τ′/2t=τ′/2时最大,其幅值为∣∣q¨jmax∣∣=32λjkvjτ′=υjkaj|q¨jmax|=32λjkvjτ′=υjkaj,则有:
根据上式和qj(t)qj(t)的表达式,可以计算出加速阶段的位移为:
速度曲线与时间轴围成的面积为|Dj||Dj|,根据计算可以得到关系式:
在加速度为0的阶段(最大速度阶段,τ′≤t≤τ′+h′τ′≤t≤τ′+h′),关节速度表达式为:
减速阶段与加速阶段对称(t′f=2τ′+h′tf′=2τ′+h′),减速阶段在时间段τ′+h′≤t≤t′fτ′+h′≤t≤tf′上的轨迹为:
如果目标点距离初始位置过近,可能达不到最大速度和加速度就要开始减速,考虑以最大速度做匀速直线运动阶段的时间为0这种临界状态(The minimum time tftf is obtained when the parameters λjλj and υjυj are the largest),为了能以最大速度运动,位移|Dj||Dj|必须满足如下条件:
参考《Modeling Identification and Control of Robots》的第 13.3.4节 Continuous acceleration profile with constant velocity phase 以及 libfranka MotionGenerator,修改关节空间轨迹规划代码,并在while循环中进行轨迹生成的模拟。
traj.h
 View Code
View Codetraj.cpp
View Codemain.cpp
View Code注意以下几点:
1. 原examples_common.h代码中的ddq_max_start_为加速度,ddq_max_goal_为减速度(接近目标点,开始减速),大多数情况下两者相等
2. 在根据速度曲线与时间轴围成的面积计算最大同步速度的时候,会遇到一元二次方程a⋅v2sync+b⋅vsync+c=0a⋅vsync2+b⋅vsync+c=0求解的问题,对于大于零的两个解要选其中数值小的那个,否则会超过最大速度限制,即取值为−b−b2−4ac√2a−b−b2−4ac2a。可以简要证明如下:
这两个解分布在v=−b2av=−b2a的两侧,而−b2a=tfka3=13(32kvka+|Dj|kv)ka=12kv+12(2|Dj|ka3kv)−b2a=tfka3=13(32kvka+|Dj|kv)ka=12kv+12(2|Dj|ka3kv),根据|Dj||Dj|的条件 2|Dj|ka3kv−kv=13kv(2|Dj|ka−3k2v)>02|Dj|ka3kv−kv=13kv(2|Dj|ka−3kv2)>0,因此−b2a>kv−b2a>kv,即值较大的解会超出速度限制。
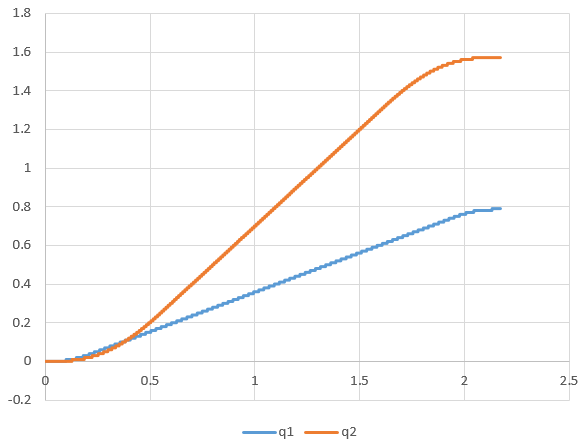
将时间、轴1轴2的关节角度和速度保存在CSV文件中,用Excel画出散点图。关节角度随时间变化曲线如下(轴1从0→45°,轴2从0→90°):
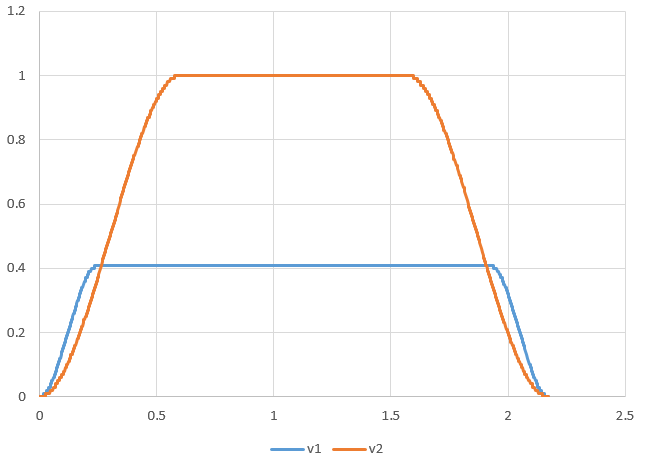
关节速度随时间变化曲线如下:
参考:
机器人中的轨迹规划(Trajectory Planning )
周期同步位置模式(CSP),轮廓位置模式(PPM),位置模式(PM)
Robot and interface specifications
Trajectory Planning for Automatic Machines and Robots
Modeling Identification and Control of Robots. 13.3.4 Continuous acceleration profile with constant velocity phase

 浙公网安备 33010602011771号
浙公网安备 33010602011771号