关于GPIO合封引脚以及晶振引脚使用注意事项
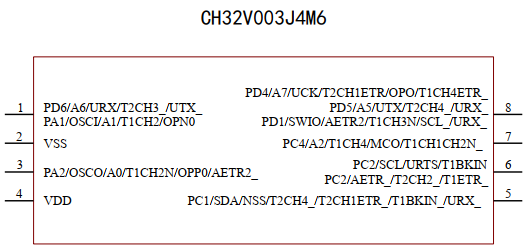
CH32系列某些小封装芯片可能会存在合封引脚,如下图。以下图8脚为例,为PD4、PD5、PD1的合封引脚,其中PD1引脚还作为SWIO下载引脚。若要使用PD4引脚作为普通IO输出高低电平,注意在进行程序配置时需要注意:
(1)PD4引脚按照GPIO输出配置;
(2)合封引脚PD5和PD1要配置为浮空输入模式;
(3)PD1同时作为SWIO下载引脚,要注意关闭SDI下载功能,要注意开启复用时钟,即AFIO时钟。
PD4引脚作为普通IO使用配置代码如下:

/********************************** (C) COPYRIGHT *******************************
* File Name : main.c
* Author : WCH
* Version : V1.0.0
* Date : 2023/12/25
* Description : Main program body.
*********************************************************************************
* Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd.
* Attention: This software (modified or not) and binary are used for
* microcontroller manufactured by Nanjing Qinheng Microelectronics.
*******************************************************************************/
/*
*@Note
*Multiprocessor communication mode routine:
*Master:USART1_Tx(PD5)\USART1_Rx(PD6).
*This routine demonstrates that USART1 receives the data sent by CH341 and inverts
*it and sends it (baud rate 115200).
*
*Hardware connection:PD5 -- Rx
* PD6 -- Tx
*
*/
#include "debug.h"
/* Global define */
/* Global Variable */
/*********************************************************************
* @fn USARTx_CFG
*
* @brief Initializes the USART2 & USART3 peripheral.
*
* @return none
*/
void GPIO_CFG(void)
{
GPIO_InitTypeDef GPIO_InitStructure = {0};
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOD , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO , ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SDI_Disable, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_30MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
}
/*********************************************************************
* @fn main
*
* @brief Main program.
*
* @return none
*/
int main(void)
{
u8 i=0,j=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
SystemCoreClockUpdate();
Delay_Init();
#if (SDI_PRINT == SDI_PR_OPEN)
SDI_Printf_Enable();
#else
// USART_Printf_Init(115200);
#endif
// printf("SystemClk:%d\r\n",SystemCoreClock);
// printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() );
GPIO_CFG();
while(1)
{
Delay_Ms(50); //延时50ms
GPIO_WriteBit(GPIOA, GPIO_Pin_2, (i==0) ? (i=Bit_SET):(i=Bit_RESET)); //设置PA2引脚状态为低电平
Delay_Ms(50); //延时50ms
GPIO_WriteBit(GPIOD, GPIO_Pin_4, (j==0) ? (j=Bit_SET):(j=Bit_RESET)); //设置PD4引脚状态为低电平
}
}
当使用晶振引脚作为普通GPIO使用时,注意系统主频要切换使用内部晶振进行配置。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号