图形学(2)MVP变换
Model View transformation(模型视图变换)
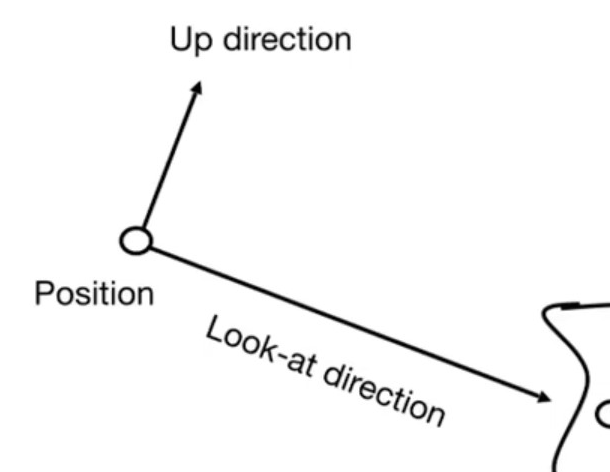
注意到定义一个相机我们需要三个矢量:
- 位置 \(\vec{e}\)
- 视线方向 \(\hat{g}\)
- 向上方向 \(\hat{t}\)
注意到我们的目标就是将相机固定到原点,并使 \(\hat{g},\hat{t}\) 和坐标轴对齐。
约定
我们最终让相机的向上方向 \(\hat{t}\) 为 \(y\) 轴,视线方向 \(\hat{g}\) 为 \(-z\) 轴。
移动 \(\vec{e}\) 至原点
\[T_{view}=\begin{bmatrix}
1 & 0 & 0 & -x_e\\
0 & 1 & 0 & -y_e\\
0 & 0 & 1 & -z_e\\
0 & 0 & 0 & 1
\end{bmatrix}
\]
将 \(\hat{g},\hat{t}\) 与坐标轴对齐
考虑其逆矩阵:
\[R^{-1}_{view}=\begin{bmatrix}
x_{\hat{g}\times\hat{t}} & x_{\hat{t}} & x_{-\hat{g}} & 0\\
y_{\hat{g}\times\hat{t}} & y_{\hat{t}} & y_{-\hat{g}} & 0\\
z_{\hat{g}\times\hat{t}} & z_{\hat{t}} & z_{-\hat{g}} & 0\\
0 & 0 & 0 & 1
\end{bmatrix}
\]
注意到 这是一个正交矩阵,其逆矩阵为其转置,故有:
\[R_{view}=(R^{-1}_{view})^\mathbf{T}=
\begin{bmatrix}
x_{\hat{g}\times\hat{t}} & y_{\hat{g}\times\hat{t}} & z_{\hat{g}\times\hat{t}} & 0\\
x_{\hat{t}} & y_{\hat{t}} & z_{\hat{t}} & 0\\
x_{-\hat{g}} & y_{-\hat{g}} & z_{-\hat{g}} & 0\\
0 & 0 & 0 & 1
\end{bmatrix}
\]
则有 \(M_{view}=R_{view}T_{view}\);让所有物体和相机一起做同样的变换,即得到结果。
Projection Transformation(投影变换)
Orthographic Projection(正交投影)
将长方体 \([l,r]\times[b,t]\times[f,n]\) 变换到 \([-1,1]^3\)(正规立方体),注意 \(f\le n\),因为我们看向 \(-z\) 方向。
\[M_{ortho}=\begin{bmatrix}
\frac{2}{r-l} & 0 & 0 & 0\\
0 & \frac{2}{t - b} & 0 & 0\\
0 & 0 & \frac{2}{n-f} & 0\\
0 & 0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
1 & 0 & 0 & -\frac{r+l}{2}\\
0 & 1 & 0 & -\frac{t+b}{2}\\
0 & 0 & 1 & -\frac{n+f}{2}\\
0 & 0 & 0 & 1
\end{bmatrix}
\]
Perspective Projection(透视投影)
我们先将透视投影转到正交投影,然后进行一个正交投影得到正规立方体。
考虑一个近平面 \(z=n\),一个远平面 \(z=f\),对任意一条从原点出发穿过两个平面的射线,交近平面于 \(A\),交远平面于 \(B\),我们希望映射保证 \(A\rightarrow A,B\rightarrow C\),其中 \(C\) 满足 \(x_C=x_A,y_C=y_A,z_C=f\),即 \(A\) 在远平面上的投影。
简单计算有:
\[M_{persp}=\begin{bmatrix}
n & 0 & 0 & 0\\
0 & n & 0 & 0\\
0 & 0 & n+f & -nf\\
0 & 0 & 1 & 0
\end{bmatrix}
\]
Viewport Transformation(视口变换)
\([-1,1]^3\rightarrow[0,width]\times[0,height]\times[-1,1]\) 即可。
\[M_{viewport}=
\begin{bmatrix}
\frac{width}{2} & 0 & 0 & \frac{width}{2}\\
0 & \frac{height}{2} & 0 & \frac{height}{2}\\
0 & 0 & 1 & 0\\
0 & 0 & 0 & 1
\end{bmatrix}
\]
参数的计算
上文矩阵中的 \(l,r,b,t,f,n\) 决定了可视区域,其中 \(l,r,b,t\) 根据 FOV,长宽比(aspect_ratio)和 \(f,n\) 计算,这里使用 fovY:
\[\tan\frac{fovY}{2}=\frac{t}{\left|n\right|}\\
aspect\ ratio=\frac{r}{t}
\]
