
欧拉角,旋转矩阵,旋转向量
1. 旋转矩阵。三维空间种两个点P1(x1, y1, z1) 和P2 (x2,y2,z2), 由P1经过旋转矩阵R可以得到P2: P2=R.P1. 其中旋转矩阵R为正交矩阵(R.RT=I)
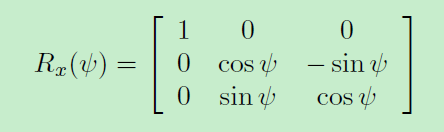
绕x轴旋转ψ角的旋转矩阵:
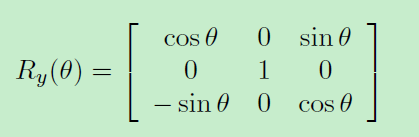
绕y轴旋转θ角的旋转矩阵:
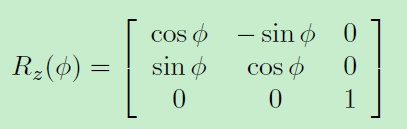
绕z轴旋转Φ角的旋转矩阵:
即使围绕每个轴都旋转一样的角度,先围绕哪个轴旋转会造成不同的结果。假设旋转的次序分别是x,y,z 轴,最终得到的旋转矩阵是:

2. 从旋转矩阵到欧拉角
未完待续。。。

1. 旋转矩阵。三维空间种两个点P1(x1, y1, z1) 和P2 (x2,y2,z2), 由P1经过旋转矩阵R可以得到P2: P2=R.P1. 其中旋转矩阵R为正交矩阵(R.RT=I)
绕x轴旋转ψ角的旋转矩阵:
绕y轴旋转θ角的旋转矩阵:
绕z轴旋转Φ角的旋转矩阵:
即使围绕每个轴都旋转一样的角度,先围绕哪个轴旋转会造成不同的结果。假设旋转的次序分别是x,y,z 轴,最终得到的旋转矩阵是:
2. 从旋转矩阵到欧拉角
未完待续。。。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号